מבוא
קיימים שני סוגים עיקריים של מכונות סובבות להמרת אנרגיה חשמלית: מכונות זרם ישר (DC) ומכונות זרם חילופין (AC). כאשר מכונה סובבת ממירה אנרגיה חשמלית לאנרגיה מכנית, היא נקראת מנוע; כאשר היא ממירה אנרגיה מכנית לאנרגיה חשמלית, היא נקראת גנרטור. לכן קיימים מנועי DC, גנרטורי DC, מנועי AC וגנרטורי AC.
המונח “מכונה” משמש לתיאור מאפיינים המשותפים הן למנועים והן לגנרטורים. לעיתים קרובות, אותה מכונה יכולה לפעול גם כמנוע וגם כגנרטור, ללא צורך בשינוי מבני – תכונה זו בולטת במיוחד במכונות DC. פרק זה מוקדש כולו ללימוד גנרטורי DC ומנועי. בנוסף, נתמקד כאן בביצועי מצב מתמיד של המכונה.
במכונת DC, השטף המגנטי האחיד נוצר ע”י קטבים קבועים המורכבים על החלק הנייח (הסטטור). ניתן להשתמש בקטבים קבועים (מגנטים קבועים) או בליפופי שדה (field windings) סביב הקטבים. אחד היתרונות המרכזיים של מכונה עם ליפופי שדה הוא שניתן לשלוט בשטף במכונה ע”י ויסות הזרם הישר בליפוף השדה.
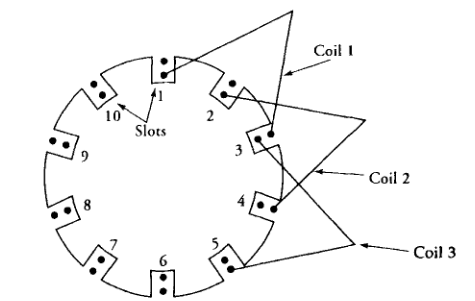
הליפוף בו נוצר הכא”מ (emf) מלופף על החלק המסתובב – הרוטור, הנקרא עוגן (armature), והליפוף עצמו נקרא ליפוף עוגן. העוגן נתמך ומיושר מכנית בתוך הסטטור ע”י מכסי קצה (end bells), כפי שמוצג באיור הבא:
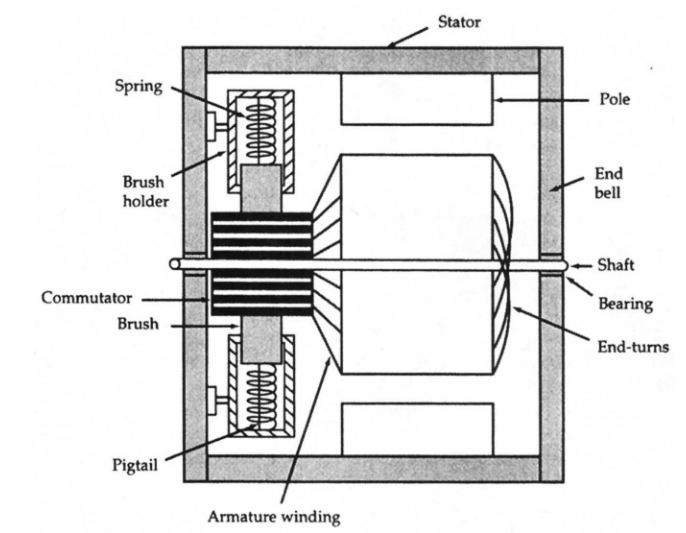
מאפיינים עיקריים של מנוע DC. מ-(Guru, 2001).
מבנה מכני של מכונת DC
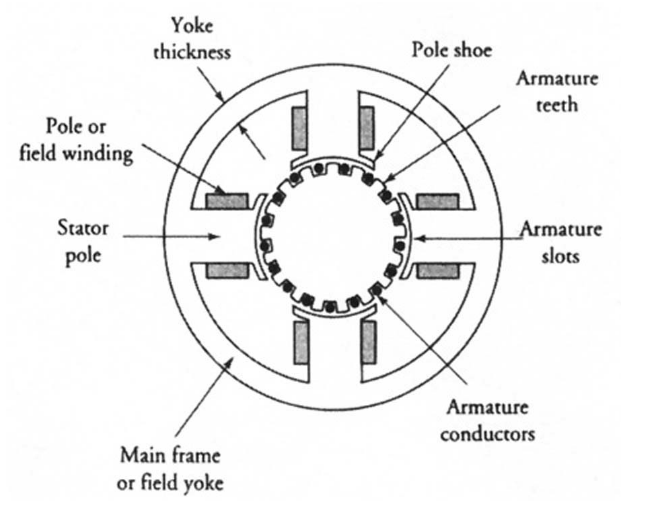
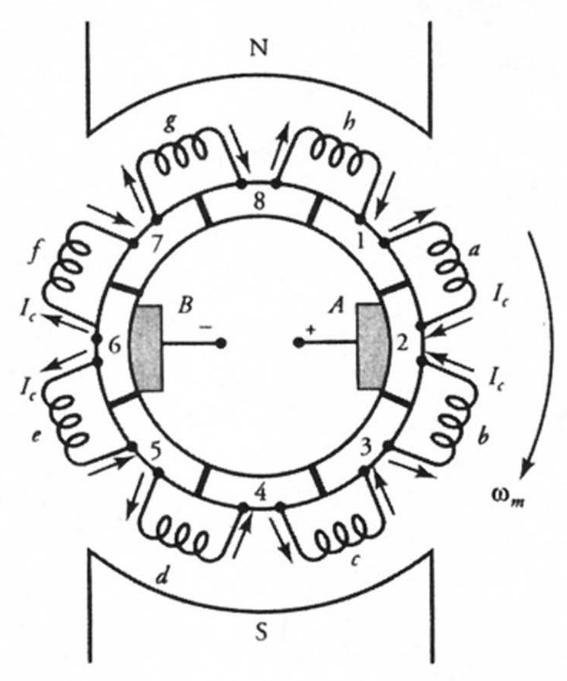
חתך של מכונת DC בעלת 4 קטבים. (Guru, 2001).
להלן תיאור הרכיבים העיקריים במכונת DC:
סטטור
הסטטור מספק תמיכה מכנית למכונה וכולל את ה”יוק” (yoke) והקטבים (field poles). היוק משמש כנתיב בעל פרמיאביליות גבוהה לשטף המגנטי. במכונות קטנות עם מגנטים קבועים, היוק עשוי להיות טבעת מגולגלת מרותכת. במכונות קטנות עם ליפופי שדה, הקטבים והיוק מנוקבים כיחידה אחת מלמינציות פלדה דקות. במכונות גדולות, היוק בנוי מקטעי פלדה יצוקה.
הקטבים מורכבים בתוך היוק ומעוצבים כך שיתאימו לליפופי השדה. לרוב, הקטבים עשויים למינציות דקות כדי לצמצם הפסדים מגנטיים (בעיקר עקב קרבתם לשטף העוגן). במכונות גדולות, הקטבים נבנים בנפרד ומוברגים ליוק. שטח החתך של הקוטב קטן מזה של נעל הקוטב (pole shoe) – כדי לאפשר מקום לליפוף השדה ולהקטין את אורך החוט הממוצע (ולפיכך את משקלו ועלותו). נעל הקוטב עוזרת לפזר את השטף באזור מרווח האוויר.
ליפופי שדה
סלילי השדה מלופפים על הקטבים כך שהקוטביות מתחלפת בין קוטב לקוטב. קיימים שני סוגי ליפופי שדה:
- שדה במקביל (shunt): ליפוף עם הרבה כריכות של חוט דק, מחובר במקביל לעוגן.
- שדה בטור (series): ליפוף עם מעט כריכות של חוט עבה, מחובר בטור לעוגן.
מכונה יכולה להכיל את שני הליפופים על אותו קוטב (compound). כאשר שני הליפופים יוצרים שטפים באותו כיוון, המכונה נקראת “מצטברת” (cumulative); כאשר השטפים מנוגדים – “דיפרנציאלית” (differential). ליפופי שדה צורכים הספק קבוע; שימוש במגנטים קבועים במקום ליפוף שדה במקביל מבטל את הפסדי ההספק ומשפר את הנצילות, אך מגביל את השטף לערך קבוע.
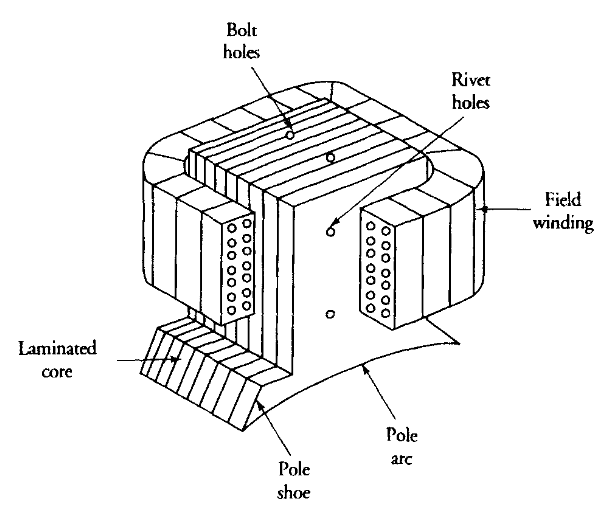
קוטב ליפוף שדה של מכונת DC. מ-(Guru, 2001).
עוגן (רוטור)
החלק המסתובב, העוגן, מוקף בקטבים הקבועים של הסטטור. אורכו האפקטיבי של העוגן לרוב שווה לאורך הקוטב. העוגן עגול בחתך, עשוי למינציות פלדה דקות מבודדות חשמלית, המורכבות על הציר. פרמיאביליות גבוהה מבטיחה נתיב רילקטנס נמוך לשטף, והבידוד החשמלי מצמצם זרמי מערבולת. בלמינציות יש חריצים למיקום סלילי העוגן (armature winding), העשויים לרוב מחוט נחושת מבודד.
קומוטטור
הקומוטטור עשוי מקטעי נחושת בצורת טריז, מבודדים זה מזה ע”י יריעות מיקה, ומורכב על הציר. קצה של כל שני סלילי עוגן מחובר למקטע קומוטטור. אופן החיבור מגדיר את סוג ליפוף העוגן (lap/wave). ליפוף העוגן הוא “הלב” של מכונת DC – בו נוצר הכא”מ (בגנרטור) ומתפתח המומנט (במנוע). הקומוטטור משמש כמיישר מכני: הוא הופך את הכא”מ המושרה לאות חד-כיווני.
מברשות
המברשות מוחזקות במקומן על הקומוטטור ע”י מחזיקי מברשות עם קפיץ מתכוונן, המפעיל לחץ קבוע. לחץ נמוך מדי יגרום למגע לקוי, ניצוצות ושחיקה; לחץ גבוה מדי יגרום לשחיקה מואצת ולהתחממות. קיימים סוגי מברשות שונים (פחמן, גרפיט, תערובות). המברשות מבודדות חשמלית ממכסה הקצה, ומחוברות אליו ע”י חוטי נחושת גמישים (pigtail). דרכן מתבצע החיבור החשמלי בין המעגל החיצוני לסלילי העוגן.
ליפופי עוגן
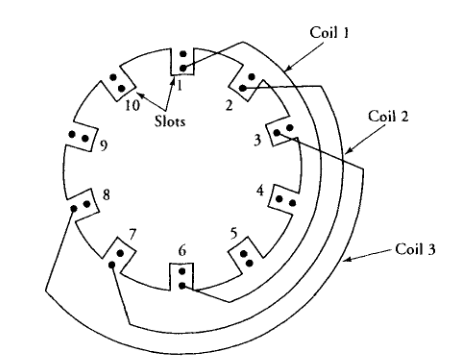
היקף העוגן כולל חריצים למיקום הסלילים, המבודדים ע”י נייר דק. במכונות קטנות, הסלילים נכרכים ישירות; בגדולות, הסלילים מוכנים מראש ומוכנסים לחריצים. כל סליל עשוי מספר כריכות של חוט נחושת מבודד.
במכונה אידיאלית, הכא”מ המרבי נוצר בסליל בעל פסיעה מלאה (full-pitch), כלומר כאשר שני צידי הסליל נמצאים תחת מרכזי קטבים מנוגדים. במכונות דו-קוטביות, די קשה למקם סלילים בעלי פסיעה מלאה. במכונות אלו משתמשים בסלילים בעלי פסיעה חלקית (fractional-pitch). סלילים אלו גם חוסכים בנחושת אך הכא”מ קטן במקדם מסוים (pitch factor).
הליפוף הכי נפוץ הוא ליפוף דו-שכבתי – מספר הסלילים שווה למספר החריצים, וכל חריץ מכיל שני צדדים של סלילים שונים. כאשר מספר החריצים אינו מתחלק במספר הקטבים, משתמשים בפסיעה חלקית מרבית, אותה ניתן לחשב לפי:
כאשר:
הוא פסיעת הסליל בחריצים הוא מספר החריצים הוא מספר הקטבים
אם צד אחד של הסליל בחריץ
מיקום של הסלילים בעוגן עם
חריצים במכונת DC דו-קוטבית. (Guru, 2001).
מיקום של הסלילים בעוגן עם
חריצים במכונת DC ארבע-קוטבית. (Guru, 2001).
סוגי ליפופי עוגן (Lap/Wave)
אופן חיבור ליפוף העוגן לקומוטטור קובע את סוג הליפוף. קיימים שני סוגים עיקריים:
- Lap winding (ליפוף חפיפה/חפיפתי)
- Wave winding (ליפוף גל/גלי)
ליפוף Lap נפוץ במכונות זרם ישר במתח נמוך וזרם גבוה. ליפוף Wave מתאים למכונות במתח גבוה וזרם נמוך. כל אחד מהסוגים מחולק לתת-סוגים (simplex, duplex, triplex וכו’), אך לרוב עוסקים ב-simplex בלבד (כלומר, Lap ו-Wave פשוטים).
במכונה דו-קוטבית, אין הבדל בין הסוגים – בשניהם יש שני מסלולים מקבילים ושתי מברשות. במכונת Lap, מספר המסלולים המקבילים שווה למספר הקטבים; במכונת Wave תמיד יש שני מסלולים מקבילים, ללא תלות במספר הקטבים.
ליפוף Lap
בליפוף Lap, שני קצות כל סליל מחוברים למקטעי קומוטטור סמוכים. נניח שיש
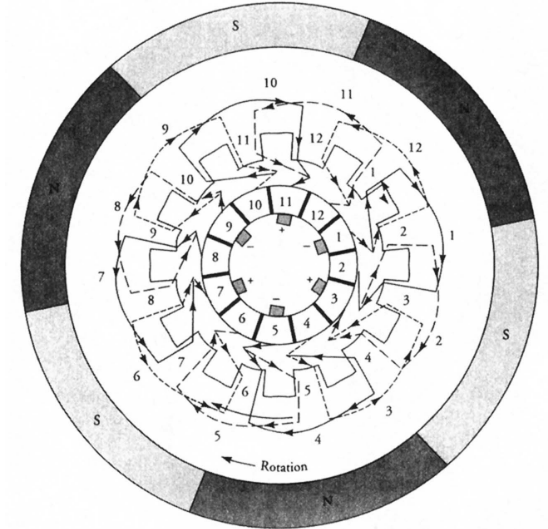
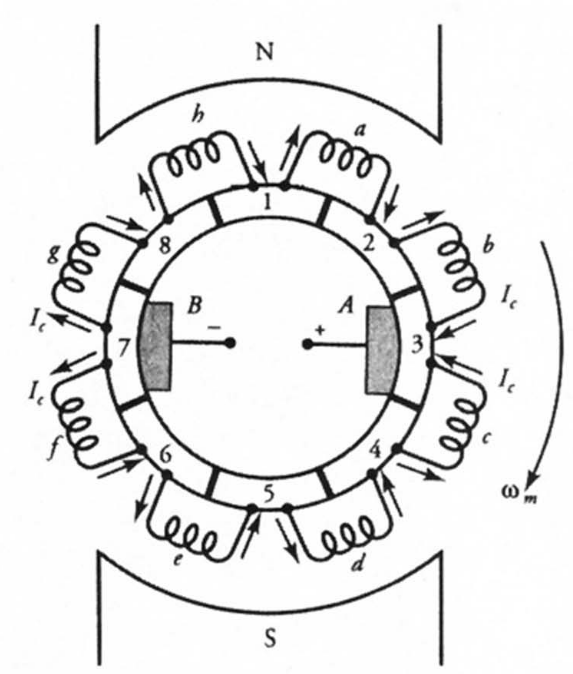
דיאגרמת ליפוף קוטבית של מכונה בת 6 קטבים, 12 סלילים ו-12 מקטעי קומוטטור. (Guru, 2001).
בדיאגרמת ליפוף קוטבית של מכונה בת 6 קטבים, 12 סלילים ו-12 מקטעי קומוטטור, ניתן לראות את כיווני הזרמים בסלילים. במקטעים 1, 5, 9 הזרמים יוצאים מהקומוטטור – אלו מיקומי מברשות שליליות. במקטעים 3, 7, 11 הזרמים נכנסים – מברשות חיוביות. הפרש הפוטנציאל בין מברשת חיובית לשלילית שווה לסכום הכא”מ בשני סלילים בלבד. לכן, כל שלוש המברשות השליליות מחוברות יחד, וכך גם החיוביות.
חיבורי מברשחות וזרמים ב-6 מסלולים מקבילים של מכונת DC עם ליפופי Lap של האיור לעיל, כאשר היא מתפקדת כגנרטור. (Guru, 2001).
במכונה בת 6 קטבים, יהיו 6 מסלולים מקבילים – כל מסלול מעביר שישית מזרם העוגן.
אם נתייחס לכל צד של סליל כמוליך, ניתן להגדיר את חיבורי המוליכים בצד הקומוטטור (front pitch,
ליפוף Wave
בליפוף Wave, שני קצות כל סליל מחוברים למקטעי קומוטטור המרוחקים כמעט שתי פסיעות מלאות (360° חשמליים) זה מזה. כך הליפוף נסגר על עצמו רק פעם אחת, וכל סליל מחובר לסליל אחר תחת אותו קוטב. במספר קטבים כלשהו, ל-Wave תמיד שני מסלולים מקבילים ושתי מברשות.
ב-Wave, צעד הקומוטטור (
הסימן
משוואת הכא”מ המושרה במכונת DC
כאשר סליל בעל כריכה אחת מסתובב בשדה מגנטי אחיד, הערך הממוצע של הכא”מ המושרה בו הוא:
כאשר:
- מספר הקטבים במכונה - השטף לכל קוטב - מהירות זוויתית של העוגן
תדירות המתח המושרה בסליל:
מכך נוכל למצוא שמהירות הסיבוב (בסל”ד):
במכונת DC יש סלילים רבים, כל אחד עם מספר כריכות, והם מחוברים במסלולים מקבילים: שניים בליפוף Wave, או
- מספר כריכות בכל סליל - מספר הסלילים (או חריצים בליפוף דו-שכבתי) - מספר המסלולים המקבילים ( ב-Wave, ב-Lap)
לפיכך סך הכריכות בכל מסלול:
מאחר ויש שני מוליכים בכל ליפוף, סך המוליכים,
כך שנוכל לרשום את
בדרך כלל, מגדירים את קבוע המכונה:
כך שנוכל לרשום:
משוואה זו נכונה גם לגנרטור וגם למנוע DC. בגנרטור
הערה:
בפועל, הקטבים לא מכסים את כל היקף העוגן (לרוב
עד ), ויש להתחשב בכך בחישוב השטף.
הספק ומומנט במכונת DC
אם העוגן של גנרטור DC מספק זרם
הספק שקול חייב להיות מסופק ע”י המערכת המכנית. אם
ולכן המומנט הדרוש הוא:
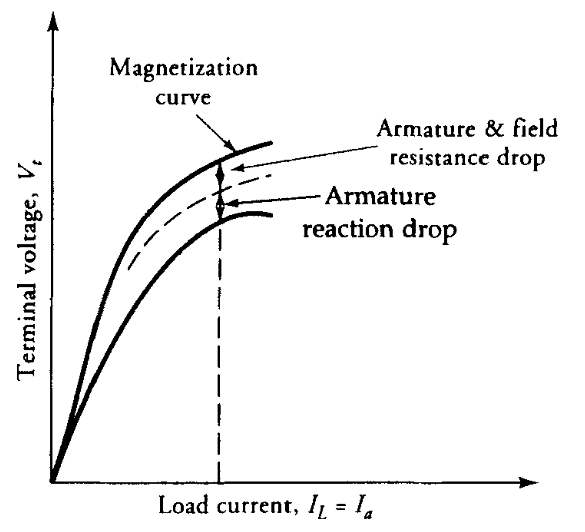
מאפיין המגנטיזציה של מכונת DC
כא”מ המושרה בליפוף העוגן של מכונת DC פרופורציונלי ישירות ל-
- השטף לכל קוטב
- מהירות העוגן
נניח כי ליפוף השדה של מכונת DC מחובר למקור DC משתנה, המסוגל לספק זרם שדה כרצוננו. אם מעגל העוגן פתוח והעוגן מסובב במהירות הנומינלית של המכונה, הכא”מ המושרה במכונה ניתן לכתיבה כך:
כאשר
השטף לכל קוטב תלוי בכוח המגנטומניע (MMF) שמספק זרם השדה. מאחר שמספר הליפופים לקוטב קבוע, השטף לכל קוטב הוא פונקציה של זרם השדה
כאשר
אולם, מאחר שמעגל השטף במכונת DC מורכב מאזורים ליניאריים (מרווחי אוויר) ואזורים לא ליניאריים (חומר מגנטי של הסטטור והעוגן),
את הקשר בין
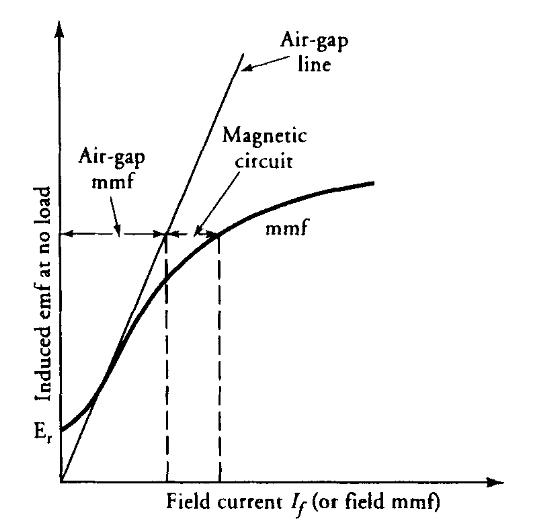
עקומת המגנטיזציה (ללא עומס) של מכונת DC. מ-(Guru, 2001).
עקומות מגנטיזציה ניתן לקבוע בניסוי הן עבור ערכים עולים והן עבור ערכים יורדים של זרם השדה. העקומות אינן חופפות בשל היסטרזיס מגנטי – עבור ערך נתון של זרם שדה, השטף תלוי אם הזרם עלה או ירד לערך זה. לכן, בניסוי יש לשנות את זרם השדה בכיוון אחד בלבד. לצורך חישובים תיאורטיים, נהוג לקחת את הממוצע של שתי העקומות ולהשתמש בו כעקומת המגנטיזציה.
כאשר זרם השדה אפס, הכא”מ המושרה אינו מתחיל מאפס אלא מערך קטן חיובי – זהו הכא”מ השיורי, הנובע משטף שיורי שנשאר במכונה מהפעלה קודמת. פרט לכך, החלק התחתון של עקומת המגנטיזציה כמעט ליניארי, כי ה-MMF הדרוש לחומר המגנטי זניח בצפיפויות שטף נמוכות, ורוב הרילקטנס במעגל המגנטי הוא במרווח האוויר. החלק העליון של העקומה מראה רוויה מגנטית – כאשר צפיפות השטף גבוהה, נדרשת עלייה משמעותית ב-MMF כדי להגדיל את השטף.
קו מרווח האוויר (air-gap line) הוא קו ישר העובר מראשית הצירים ונוגע בעקומת המגנטיזציה – הוא מייצג את ה-MMF הדרוש ליצירת שטף נתון בהנחה שכל הרילקטנס במרווח האוויר. ההפרש בין ה-MMF הכולל ל-MMF של מרווח האוויר הוא ה-MMF הנדרש לחומר המגנטי.
מאחר שהכא”מ המושרה פרופורציונלי למהירות העוגן, ניתן לשרטט עקומת מגנטיזציה לכל מהירות ע”י שימוש בעקומה שנמדדה במהירות הנומינלית:
הערה:
בגנרטורים בעלי עירור עצמי, הרוויה המגנטית (ההתעקמות של עקומת המגנטיזציה) היא תנאי הכרחי לפעולה תקינה – היא מאפשרת בניית מתח עצמי.
תיאוריית הקומוטציה
לפעולה תקינה של מכונת DC, הכא”מ המושרה בכל מוליך תחת קוטב חייב להיות באותה קוטביות. כאשר ליפוף העוגן נושא זרם, הזרם בכל מוליך תחת קוטב חייב להיות באותו כיוון. לכן, כאשר מוליך עובר מקוטב אחד לשני, כיוון הזרם בו חייב להתהפך. תהליך זה נקרא “קומוטציה” (commutation), והסליל בו מתבצע היפוך הזרם נקרא “סליל בקומוטציה”.
באופן אידיאלי, תהליך הקומוטציה אמור להיות מיידי, כפי שמוצג באיור הבא:
היפוך זרם בסליל החווה קומוטציה עם מברשות בעובי אינפיניטסימלי. (Guru, 2001).
אך בפועל, למברשות ולקומוטטור יש רוחב סופי, ולסליל יש השראות סופית – לכן היפוך הזרם לוקח זמן קצר.
היפוך זרם בסליל החווה קומוטציה עם מברשות בעובי סופי. (Guru, 2001).
האיור הבא מציג 8 סלילים המחוברים לקטעי קומוטטור של גנרטור DC דו-קוטבי. הסלילים
סלילים
ו- לפני תהליך הקומוטציה. (Guru, 2001).
כתוצאה מכך, הזרם בסלילים תחת הקוטב הצפוני זורם בכיוון ההפוך לזרם בסלילים תחת הקוטב הדרומי. אבל, גודל הזרם בכל סליל הוא
סלילים
ו- בזמן תהליך הקומוטציה. (Guru, 2001).
באותו אופן, סליל
סלילים
ו- לאחר תהליך הקומוטציה. (Guru, 2001).
כעת סליל
כדי שתהליך קומוטציה יהיה מושלם, ההיפוך של הזרם מערכו בכיוון אחד לערך שווה בכיוון השני חייב להתרחש בקטע הזמן
קומוטציה אידיאלית היא כאשר היפוך הזרם מתרחש בצורה ליניארית ומלאה בפרק הזמן בו הסליל מקוצר. במכונה רב-קוטבית, מספר הסלילים העוברים קומוטציה בכל רגע שווה למספר המסלולים המקבילים (כאשר רוחב המברשת שווה לרוחב מקטע קומוטטור).
תגובת עוגן
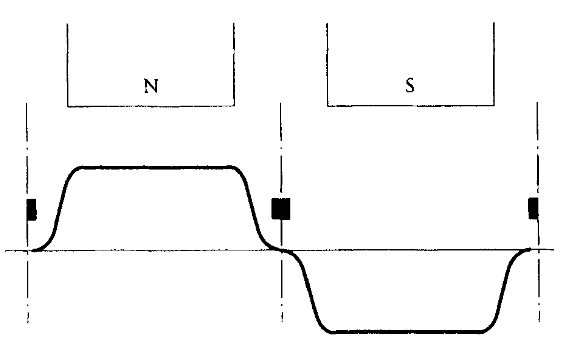
כאשר אין זרם בעוגן (ללא עומס), השטף שמייצר ליפוף השדה מתפלג באופן אחיד תחת פני הקטבים, כפי שמוצג באיור הבא של מכונת DC דו-קוטבית.
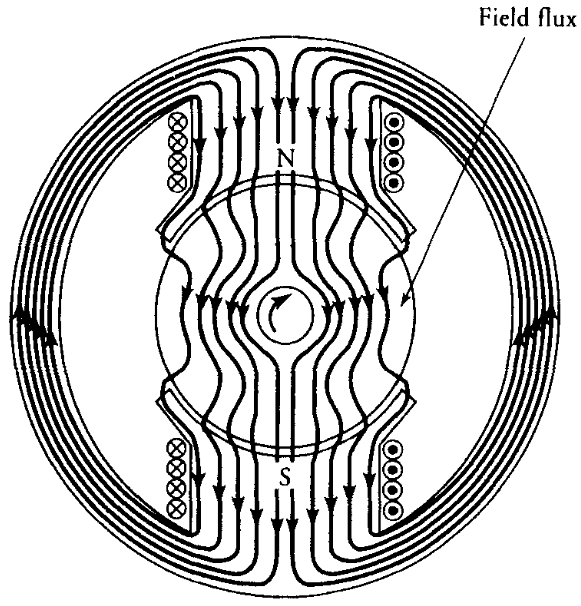
התפלגות השטף כתוצאה מ-ליפופי שדה בלבד. (Guru, 2001).
הכא”מ המושרה בסליל שנמצא במישור הניטרלי, מישור הניצב לשטף ליפופי השדה, הוא אפס. לכן זהו המקום הניטרלי כאשר אין עומס, ואנו נמקם את המברשות במיקום זה כדי להקפיד על קומוטציה כמה שיותר אידיאלית.
נניח כעת שהמכונת DC הדו-קוטבית מונעת ע”י מקור חיצוני עם כיוון השעון, ולכן פועלת כגנרטור. הכיוון של הזרמים במוליכי העוגן תחת עומס מוצגים באיור הבא:
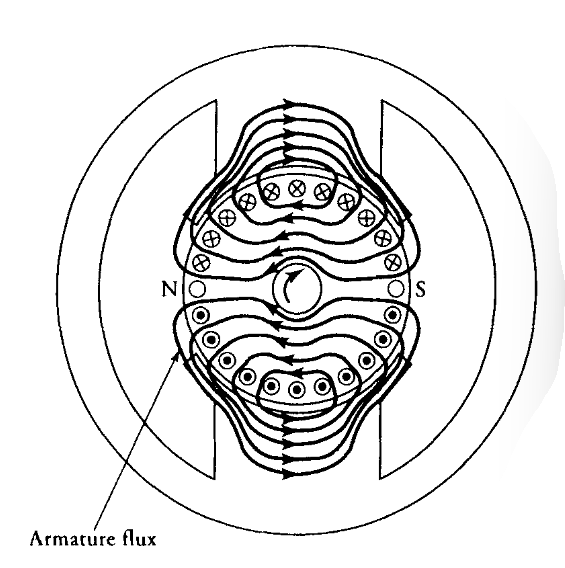
התפלגות השטף כתוצאה מ-כמ”מ בעוגן בלבד. התפלגות השטף כתוצאה מליפופי לא מוצגת כאן. (Guru, 2001).
נשים לב שציר המגנטי של שטף העוגן (ציר ה-
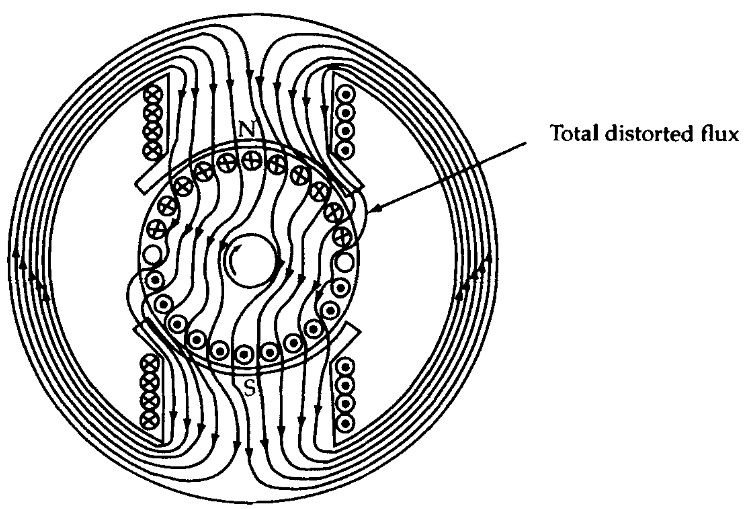
התפלגות השטף כתוצאה מליפופי שדה וכמ”מ העוגן. (Guru, 2001).
שטף העוגן החליש את השטף בחצי אחד של הקוטב וחיזק אותו בצידו השני. זרם העוגן לפיכך, הזיז את הציר המגנטי של שקול השטף בכיוון הסיבוב של הגנרטור. מאחר והציר הניטרלי ניצב לשקול השדה, הוא גם הסתובב. להשפעת כמ”מ העוגן על התפלגות השדה קוראים תגובת העוגן. נוכל לקבל תמונה יותר טובה של המתרחש בגנרטור כאשר נפרוס העוגן.
השטף לכל קוטב כאשר אין עומס מוצג באיור הבא:
שטף לקוטב כאשר אין עומס. (Guru, 2001).
כדי לפשט את הדיון, נניח שהמוליכים מפולגים באופן אחיד על פני העוגן. אז הכמ”מ של העוגן תחת עומס יהיה בצורת משולש, כפי שמוצג באיור הבא:
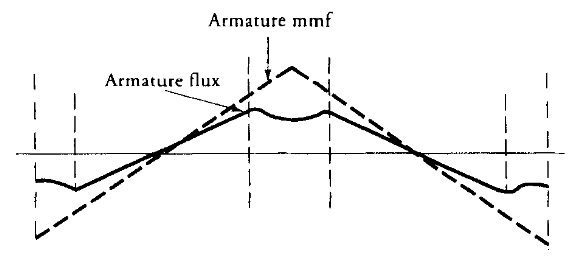
כמ”מ ושטף כתוצאה מתגובת העוגן. (Guru, 2001).
התפלגות השטף כתוצאה מכמ”מ העוגן היא קו לינארי מתחת לקוטב. אם קשת הקוטב קטנה מ-
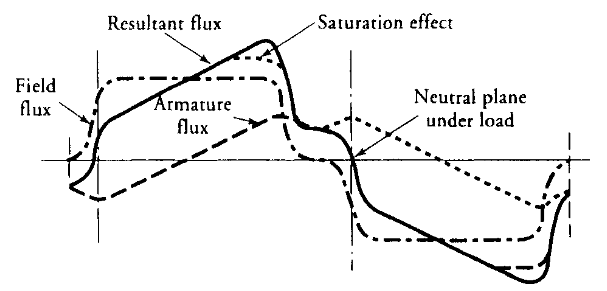
שקול השטף. (Guru, 2001).
אם הרוויה נמוכה, הירידה בשטף בחצי אחד של הקוטב מלווה בעלייה שווה בשטף בחצי השני. לכן, סך השטף לכל קוטב זהה תחת עומס כמו במצב ללא עומס. מאידך, אם הקטבים כבר היו קרובים לנקודת הרוויה במצב ללא עומס, העלייה בשטף קטנה מהירידה, כפי שמצוין בקו המקווקו באיור. במקרה זה, יש הפסד בשטף הכולל. עבור מהירות עוגן קבועה, הכא”מ המושרה בליפוף העוגן יורד בשל הירידה בשטף כאשר העוגן תחת עומס.
כפי שצוין קודם, המישור הניטרלי בגנרטור נע בכיוון הסיבוב כאשר העוגן תחת עומס. מכיוון שהאזור הניטרלי הוא האזור האידיאלי לסלילים לעבור קומוטציה, יש להזיז את המברשות בהתאם. אחרת, הקומוטציה תוביל לניצוצות מוגזמות. מכיוון ששטף העוגן משתנה עם העומס, כך גם השפעתו על השטף שנוצר ע”י ליפוף השדה. לכן, הזזת המישור הניטרלי היא פונקציה של זרם העוגן.
לתגובת העוגן יש אפקט מנטרל (demagnetizing) על המכונה. הירידה בשטף כתוצאה מתגובת העוגן מצביעה על הפסד משמעותי בכמ”מ המופעל לכל קוטב של המכונה. במכונות גדולות, לתגובת העוגן עשויה להיות השפעה הרסנית על ביצועי המכונה תחת עומס מלא. לכן, יש לפתח טכניקות להתמודד עם אפקט זה. להלן סיכום של חלק מאמצעים אלו:
-
הזזת מברשות: המברשות יכולות להיות מוזזות ממיקומן הניטרלי במצב ללא עומס (ציר ניטרלי גיאומטרי) למישור הניטרלי החדש תחת עומס. אמצעי זה הוא הזול ביותר. עם זאת, הוא שימושי רק לגנרטורים בעלי עומס קבוע.
-
אינטרפולים (Interpoles): אינטרפולים, או קטבי קומוטציה כפי שהם נקראים לפעמים, הם קטבים צרים שיכולים להיות ממוקמים באזור שבין הקטבים, ממורכזים לאורך הציר הניטרלי המכני של הגנרטור. ליפופי האינטרפולים מחוברים באופן קבוע בטור עם העוגן כדי שיהיו אפקטיביים עבור עומסים משתנים. האינטרפולים מייצרים שטף שמנוגד לשטף שנוצר ע”י כמ”מ העוגן. כאשר האינטרפול מעוצב כראוי, סך השטף לאורך הציר הניטרלי הגיאומטרי יכול להיות מובא לאפס עבור כל עומס. מכיוון שליפוף האינטרפול נושא את זרם העוגן, נדרשות רק מספר כריכות של חוט עבה יחסית כדי לספק את כמ”מ האינטרפול הנדרש.
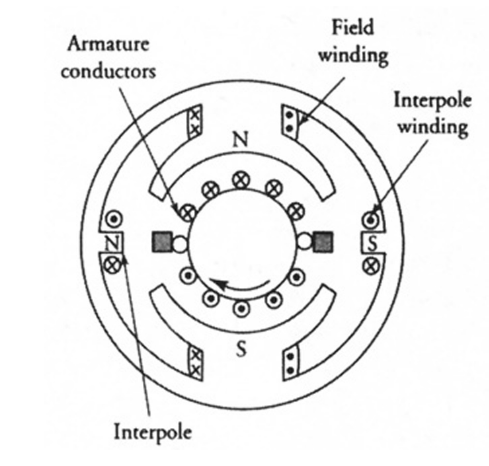
ליפופי אינטרפולים של גנרטור DC. מ-(Guru, 2001).
-
ליפופי פיצוי (Compensating windings): שיטה נוספת להתמודד השפעת תגובת העוגן היא שימוש בליפופי פיצוי. ליפופים אלו, שגם הם נושאים את זרם העוגן, ממוקמים בחריצים רדודים שנחתכים בפני הקטבים כפי שמוצג באיור הבא.
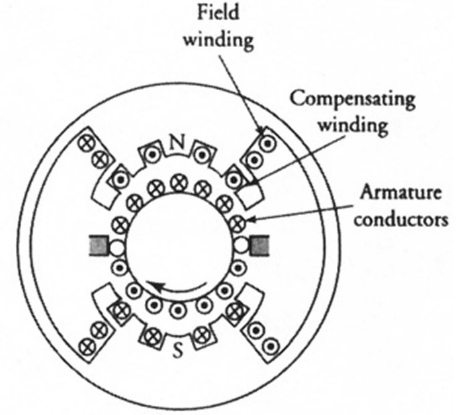
ליפוף פיצוי של גנרטור DC. מ-(Guru, 2001).
שוב, השטף שנוצר ע”י ליפוף הפיצוי שווה ומנוגד לשטף שנוצר ע”י כמ”מ העוגן.
סוגי גנרטורי DC
בהתבסס על אופן העירור, נוכל לסווג גנרטורי DC לשני סוגים: גנרטורים בעירור עצמי, וגנרטורים בעירור נפרד. גנרטור עם מגנט קבוע (PM - permanent magnet) נחשב כגנרטור בעירור נפרד עם שטף מגנטי קבוע.
זרם השדה (העירור) בגנרטור בעירור נפרד מסופק ממקור עצמאי חיצוני. לעומת זאת, בגנרטור בעל עירור עצמי, זרם השדה נלקח מהגנרטור עצמו, כלומר, ליפופי השדה מחוברים למעגל ההדקים של הגנרטור.
בהתאם לאופן חיבור ליפופי השדה, ניתן לסווג גנרטור בעל עירור עצמי לשלושה סוגים עיקריים:
- גנרטור שנט (Shunt generator): ליפוף השדה מחובר במקביל (שנט) להדקי העוגן.
- גנרטור טורי (Series generator): ליפוף השדה מחובר בטור עם העוגן.
- גנרטור מורכב (Compound generator): ליפופי שדה מחוברים גם במקביל וגם בטור עם העוגן (כלומר, יש ליפוף שדה שנט וליפוף שדה טורי).
המאפיין החיצוני של גנרטור DC הוא השינוי במתח ההדקים (המתח ביציאה) כפונקציה של זרם העומס. ניתוח מאפיין זה מאפשר להבין לאילו יישומים מתאים כל סוג גנרטור.
- הגנרטור מונע ע”י מניע ראשי (prime mover), לדוג’ מנוע סינכרוני, במהירות קבועה.
- הכא”מ המושרה בליפוף העוגן פרופורציונלי לשטף במכונה:
- הדקי העוגן מחוברים לעומס.
- לליפוף העוגן יש התנגדות סופית (גם אם קטנה), ולכן מתח ההדקים תמיד יהיה נמוך מהכא”מ המושרה.
- אם לא מפצים על תגובת העוגן, השטף הכולל במכונה תחת עומס קטן מהשטף ללא עומס, ולכן הכא”מ המושרה קטן יותר תחת עומס – מה שמקטין עוד יותר את מתח ההדקים.
- המומנט המתפתח ע”י מוליכי העוגן:
שווה בגודלו והפוך בכיוונו למומנט שמפעיל המניע הראשי (המומנט מתנגד לסיבוב). - יש ירידת מתח בין המברשות למקטעי הקומוטטור (brush-contact drop), לרוב כ-
. - אם לא ידוע מידע על השפעת תגובת העוגן, מניחים שהיא זניחה או שהגנרטור מפוצה כראוי.
- המונח “עומס” (load) מתייחס לזרם העומס. “ללא עומס” – מעגל פתוח; “עומס מלא” – זרם העומס הנומינלי.
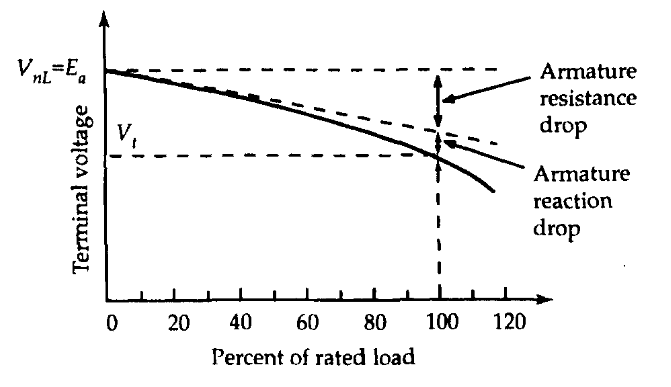
ויסות מתח בגנרטור DC
בעת עליית זרם העומס, מתח ההדקים של הגנרטור יורד – זאת בשל העלייה בנפילת המתח על התנגדות ליפוף העוגן וכן בשל ההשפעה המנטרלת (demagnetizing) של תגובת העוגן.
הגדרה:
ויסות המתח של גנרטור DC הוא מדד לירידת מתח ההדקים במצב עומס מלא, ביחס למתח ההדקים במצב ללא עומס.
אם
הוא מתח ההדקים ללא עומס (No-Load Terminal Voltage), ו- הוא מתח ההדקים בעומס מלא (Full-Load Terminal Voltage), אזי: כאשר
הוא אחוז ויסות המתח.
הערות:
- בגנרטור אידיאלי (כלומר, מתח קבוע), ויסות המתח יהיה אפס.
- ויסות מתח חיובי מתקבל כאשר מתח ההדקים ללא עומס גבוה ממתח ההדקים בעומס מלא – זהו המצב הרגיל.
- ויסות מתח שלילי (נדיר) מצביע על כך שמתח ההדקים בעומס מלא גבוה ממתח ההדקים ללא עומס.
ויסות המתח מושפע מהתנגדות ליפוף העוגן, תגובת העוגן, ונפילות מתח נוספות (כגון נפילת מגע במברשות). ערך נמוך של ויסות מתח מעיד על גנרטור איכותי, המסוגל לשמור על מתח יציב גם תחת שינויים בזרם העומס.
הפסדים במכונות DC
בדיון על הפסדי הספק במכונה, אין צורך להבחין בין הפסדים בגנרטור DC לבין מנוע DC – חוק שימור האנרגיה מחייב שההספק הנכנס למכונה שווה לסכום ההספק המופק וההפסדים. קיימות שלוש קטגוריות עיקריות של הפסדים:
- הפסדים מכניים
- הפסדי נחושת
- הפסדים מגנטיים
הפסדים מכניים
הפסדים מכניים נובעים מ:
- חיכוך בין המסבים (bearings) לציר
- חיכוך בין המברשות לקומוטטור
- גרר אוויר (windage) – התנגדות האוויר לסיבוב העוגן
- הפסד חיכוך במסבים תלוי בקוטר הציר באזור המסב, במהירות ההיקפית של הציר, ובמקדם החיכוך בין הציר למסב. כדי להקטין את מקדם החיכוך, המסבים משומנים.
- הפסד חיכוך במברשות תלוי במהירות ההיקפית של הקומוטטור, בלחץ המופעל על המברשות, ובמקדם החיכוך בין המברשת לקומוטטור. הגרפיט במברשת מסייע בשימון והפחתת החיכוך.
- הפסד גרר אוויר תלוי במהירות ההיקפית של העוגן, במספר החריצים בהיקף ובאורכו.
את ההפסדים המכניים (חיכוך וגרר אוויר),
הפסדים מגנטיים
בגלל שהכא”מ המושרה במוליכי העוגן מתחלף בתדירות התלויה במהירות הסיבוב ובמספר הקטבים, נוצרים בעוגן הפסדים מגנטיים (
- הפסדי היסטרזיס תלויים בתדירות הכא”מ המושרה, בשטח לולאת ההיסטרזיס, בצפיפות השטף ובנפח החומר המגנטי. שטח לולאת ההיסטרזיס קטן יותר עבור חומרים מגנטיים רכים (soft magnetic materials) לעומת חומרים קשים, ולכן במכונות חשמליות משתמשים בחומרים רכים.
- הפסדי זרמי ערבולת נוצרים למרות שהעוגן בנוי מלמינציות דקות – בכל למינציה נוצרים זרמי ערבולת. הפסדים אלו תלויים בעובי הלמינציה, בצפיפות השטף, בתדירות הכא”מ ובנפח החומר המגנטי.
ניתן להקטין את ההפסדים המגנטיים ע”י הגבלתה לעבודה באזור הליניארי של החומר (צפיפות שטף נמוכה), אך הדבר יגדיל את גודל המכונה ועלותה.
הפסדים סיבוביים
בניתוח מכונת DC, נהוג לאחד את ההפסדים המכניים וההפסדים המגנטיים לקטגוריה אחת – הפסדים סיבוביים (
את ההפסדים הסיבוביים ניתן למדוד ע”י הפעלת המכונה כמנוע בעירור נפרד (ללא עומס). יש לכוון את מתח ליפוף העוגן כך שהכא”מ המושרה יהיה בערך הנומינלי
- עבור גנרטור:
- עבור מנוע:
מפעילים את המתח על ליפוף העוגן ומכוונים את עירור השדה עד שהמכונה מסתובבת במהירות הנומינלית. מודדים את זרם העוגן. מאחר וזרם העוגן ללא עומס קטן מאוד, וההתנגדות קטנה, ניתן להזניח את הפסדי הנחושת. מאחר ואין הספק יוצא, כל ההספק שמסופק לעוגן הוא הפסד סיבובי:
על ידי חיסור ההפסדים המכניים, ניתן לקבל את ההפסדים המגנטיים במכונה.
הפסדי נחושת
בכל פעם שזורם זרם במוליך, נוצרים הפסדי נחושת (
- הפסד בליפוף העוגן
- הפסד בליפוף שדה שנט
- הפסד בליפוף שדה טורי
- הפסד בליפופי אינטרפול
- הפסד בליפופי פיצוי
הפסדי עומס שגויים (Stray-Load Loss)
בכל מכונה קיימים הפסדים שאינם ניתנים להסבר מדויק – אלו נקראים הפסדי עומס שגויים. נהוג להניח שמקורם הוא בעיוות השטף כתוצאה מתגובת העוגן, ובזרמי קצר בסלילים העוברים קומוטציה. כלל אצבע: במכונות גדולות (מעל
דיאגרמת זרימת הספק
בגנרטור DC, האנרגיה המכאנית המסופקת לעוגן מהמניע הראשי מומרת לאנרגיה חשמלית. חלק מהאנרגיה המכאנית הולך לאיבוד כהפסדים סיבוביים. ההספק המכאני הזמין להמרה הוא ההפרש בין ההספק המסופק לציר לבין ההפסדים הסיבוביים – הספק זה נקרא הספק מפותח (
אם
דיאגרמת זרימת הספק טיפוסית מוצגת באיור הבא:
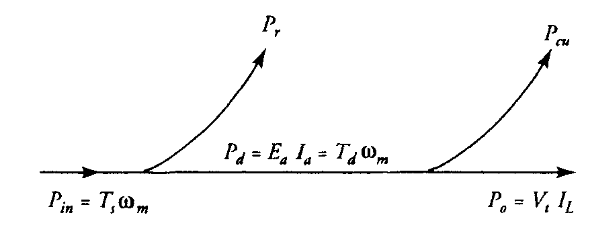
דיאגרמת זרימת הספק בגנרטור DC. מ-(Guru, 2001).
נצילות
הנצילות של מכונה מוגדרת כיחס בין ההספק המוצא להספק הנכנס. במכונה בעירור נפרד, ניתן לכלול גם את ההספק שאובד בליפוף השדה כחלק מההספק הנכנס בעת חישוב הנצילות:
גנרטור DC בעירור נפרד
כפי שמשתמע מהשם, גנרטור DC בעירור נפרד (Separately Excited DC Generator) דורש מקור DC חיצוני עצמאי לליפוף השדה. מסיבה זו, גנרטורים אלו נפוצים בעיקר ב:
- ניסויים במעבדה ובדיקות מסחריות
- מערכות הדורשות ויסות מיוחד
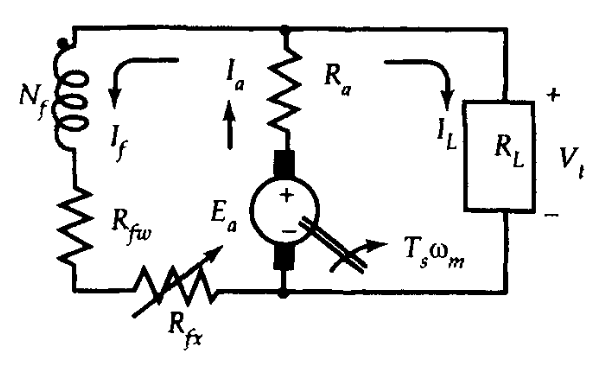
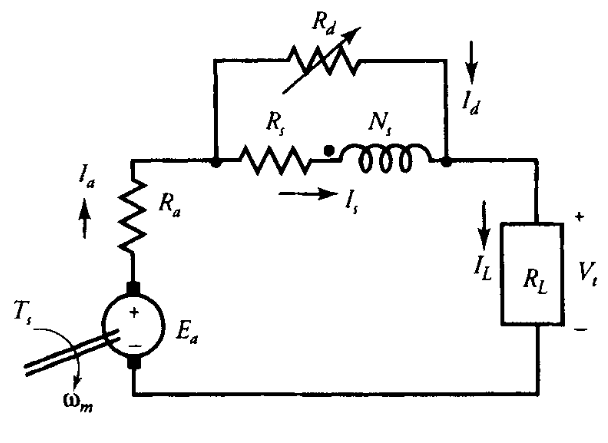
המקור החיצוני יכול להיות גנרטור DC נוסף, מיישר (מבוקר או לא), או סוללה. באיור הבא מוצג המעגל השקול של גנרטור DC בעירור נפרד במצב מתמיד (steady-state):
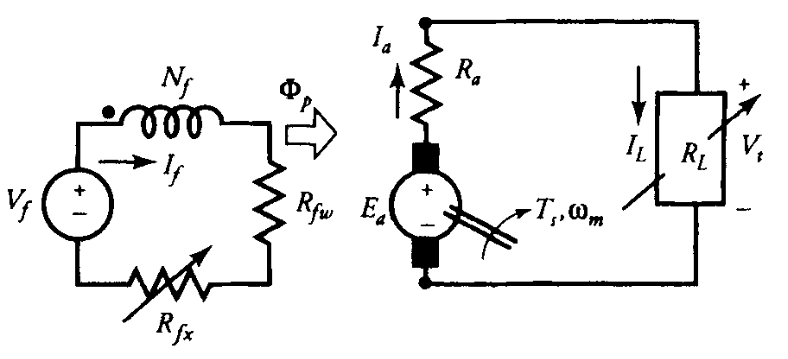
מעגל שקול של גנרטור DC בעירור נפרד. (Guru, 2001).
במצב מתמיד, אין שינוי משמעותי בזרם העוגן או במהירות הסיבוב עבור עומס נתון – כלומר, אין שינוי מהותי באנרגיה המכנית או המגנטית של המערכת. לכן, אין צורך לכלול את האינדוקטיביות של הליפופים או את התנע של המערכת במעגל השקול (הם רלוונטיים רק לניתוח דינמי).
הסימונים במעגל:
– הכא”מ המושרה בעוגן – התנגדות ליפוף העוגן (כוללת גם את התנגדות המברשות) – זרם העוגן – מתח ההדקים – זרם העומס – זרם ליפוף השדה – התנגדות ליפוף השדה – התנגדות חיצונית בטור עם ליפוף השדה (לוויסות הזרם) – מספר כריכות לליפוף שדה לכל קוטב – מתח המקור החיצוני לשדה
המשוואות המגדירות את פעולת הגנרטור במצב מתמיד:
כאשר
ממשוואה
כאשר זרם השדה קבוע ומהירות העוגן קבועה, הכא”מ המושרה בגנרטור אידיאלי אינו תלוי בזרם העוגן. בפועל, כאשר זרם העומס
גרף של מתח ההדקים כפונקציה של זרם העומס נקרא אופיין חיצוני (external/terminal characteristic) של הגנרטור. ניתן לקבוע אותו בניסוי ע”י שינוי העומס מ-
אופיין חיצוני של גנרטור DC בעירור נפרד. (Guru, 2001).
המתח בהדקים כאשר אין עומס,
דוגמא:
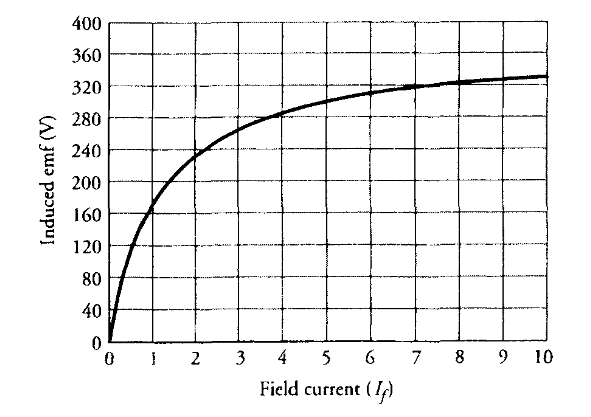
גנרטור DC בעירור נפרד עם
קטבים מספק את העומס הנומינלי במתח הנומינלי. הנתונים שלו: כתוצאה מתגובת העוגן, נטרול הכמ”מ הוא
מזרם העוגן. עקומת המגנטיזציה של הגנרטור נתונה באיור הבא:
עקום מגנטיזציה של מכונת DC ב-
( ). (Guru, 2001). נדרש לחשב:
- הכא”מ המושרה בעומס מלא
- ההספק המפותח
- המומנט המתפתח
- המומנט המופעל
- הנצילות
- ההתנגדות החיצונית במעגל השדה
- ויסות המתח
פתרון:
- זרם העומס המלא:
לכן הכא”מ המושרה בעומס מלא:
- ההספק המפותח:
נשים לב גם שהמהירות הזוויתית:
- המומנט המתפתח בעומס מלא הוא:
- ההספק המכני הנכנס בעומס מלא הוא:
המומנט המופעל (כולל הפסדי חיכוך) בעומס מלא:
- מעקום המגנטיזציה, זרם השדה האפקטיבי בעומס מלא ללא תגובת העוגן הוא
. זהו זרם השדה הזורם בליפופי השדה כאשר אין אפקט נטרול של תגובת העוגן. הכמ”מ המתאים הוא . לכן כמ”מ הנטרול הוא בגודל . לכן סך הכמ”מ שצריך להיות מסופק בליפופי שדה הוא . לפיכך זרם השדה בפועל בעומס מלא הוא: הפסד הספק בליפוף השדה הוא
לכן ההספק הכולל הנכנס:
כך שהנצילות:
- ההתנגדות הכוללת במעגל ליפופי השדה:
לכן:
- ללא עומס, תגובת העוגן היא אפס. לכן, כמ”מ השדה הוא
. מעקומת המגנטיזציה, הכא”מ המושרה ללא עומס הוא בערך . לכן, ויסות המתח הוא:
גנרטור שנט (Shunt Generator)
כאשר ליפוף השדה של גנרטור DC בעירור נפרד מחובר במקביל לעוגן, מתקבל גנרטור שנט. במצב זה, מתח ההדקים הוא גם מתח ליפוף השדה. במצב ללא עומס, זרם העוגן שווה לזרם השדה. כאשר מחובר עומס, זרם העוגן מספק גם את זרם השדה וגם את זרם העומס, כפי שמוצג באיור הבא:
מעגל שקול של גנרטור שנט. (Guru, 2001).
מאחר שמתח ההדקים יכול להיות גבוה, יש לבחור התנגדות גבוהה לליפוף השדה כדי למזער את הפסדי ההספק. לכן, ליפוף השדה בשנט עשוי מספר רב של כריכות חוט דק.
כל עוד קיים שטף שיורי בקטבים, גנרטור שנט מסוגל “לבנות” את מתח ההדקים. תהליך בניית המתח מתרחש כך:
- כאשר הגנרטור מסתובב במהירות הנומינלית, השטף השיורי בקטבים יוצר כא”מ מושרה
בעוגן. - מאחר שליפוף השדה מחובר במקביל לעוגן, הכא”מ המושרה יוצר זרם קטן בליפוף השדה.
- אם ליפוף השדה מחובר בכיוון נכון, הכמ”מ שלו מחזק את השטף השיורי, מה שמגביר את השטף הכולל לכל קוטב.
- העלייה בשטף מגבירה את הכא”מ המושרה, שמגביר את זרם השדה, וכן הלאה – תהליך זה מצטבר (cumulative).
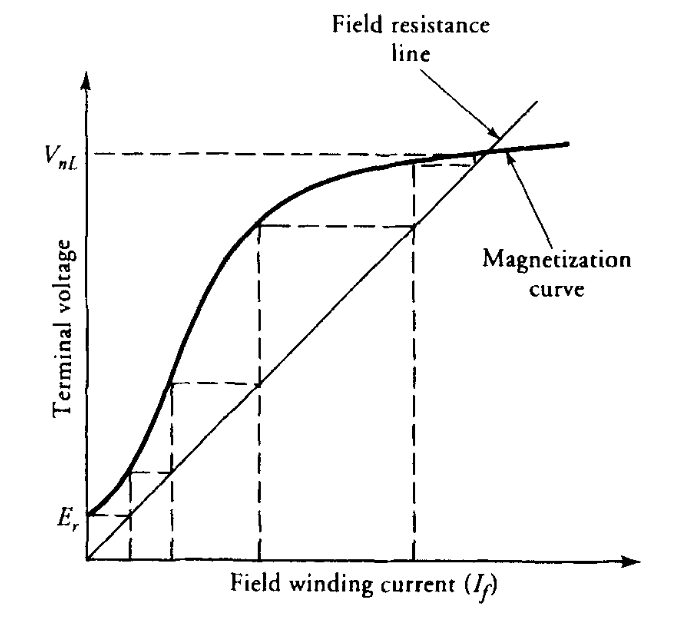
בניית מתח בגנרטור שנט. (Guru, 2001).
האם תהליך זה נמשך לנצח? לא – הכא”מ המושרה עוקב אחרי עקומת המגנטיזציה הלא-ליניארית. הזרם בליפוף השדה תלוי בהתנגדות הכוללת במעגל השדה. הקשר בין זרם השדה למתח השדה הוא ליניארי, והשיפוע של הקו הוא ההתנגדות במעגל השדה – קו זה נקרא קו ההתנגדות של השדה (field-resistance line). הגנרטור בונה מתח עד נקודת החיתוך בין קו ההתנגדות לעקומת הרוויה המגנטית – זהו מתח ללא עומס.
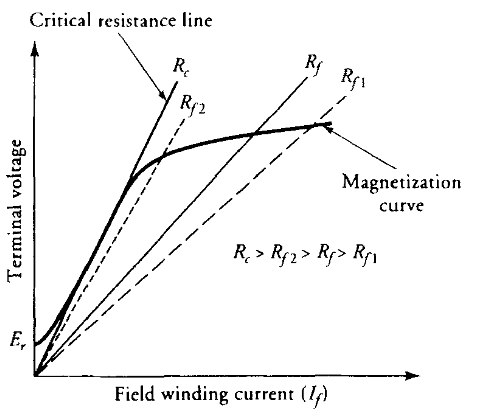
בניית מתח עבור ערכי התנגדות שדה שונים בגנרטור שנט. (Guru, 2001).
התנגדות שדה קריטית היא ערך ההתנגדות בו קו ההתנגדות משיק לעקומת המגנטיזציה. אם התנגדות השדה גדולה או שווה לערך הקריטי, הגנרטור לא יבנה מתח. מהירות הסיבוב בה התנגדות השדה הופכת לקריטית נקראת מהירות קריטית.
לסיכום, בניית מתח בגנרטור שנט תתרחש אם:
- קיים שטף שיורי בקטבים
- ליפוף השדה מחובר כך שהכמ”מ שלו מחזק את השטף השיורי
- התנגדות מעגל השדה קטנה מההתנגדות הקריטית
המשוואות המתארות את פעולת גנרטור שנט במצב מתמיד:
אופיין חיצוני של גנרטור שנט
במצב ללא עומס, זרם העוגן שווה לזרם השדה (שהוא קטן יחסית לזרם העומס), ולכן מתח ההדקים כמעט שווה לכא”מ המושרה. כאשר זרם העומס גדל, מתח ההדקים יורד בשל:
- עלייה בנפילת המתח
- השפעה מנטרלת של תגובת העוגן
- ירידה בזרם השדה עקב ירידת הכא”מ המושרה
אופיין חיצוני של גנרטור שנט. (Guru, 2001).
אם הגנרטור פועל באזור הליניארי של עקומת המגנטיזציה, ירידה קטנה במתח ההדקים גורמת לירידה דומה בזרם השדה, מה שמקטין את השטף והכא”מ, וגורם לירידה נוספת במתח – תהליך זה עלול להוביל לקריסת המתח. לעומת זאת, באזור הרוויה, ירידה בזרם השדה גורמת (למשל
כאשר העומס גדל לנקודת השבירה (break-down point), ירידה נוספת בהתנגדות העומס גורמת לירידה חדה במתח ההדקים ולירידה בזרם השדה. בקצר מוחלט, זרם השדה שואף לאפס, וזרם הקצר שווה ליחס בין המתח השיורי להתנגדות מעגל העוגן.
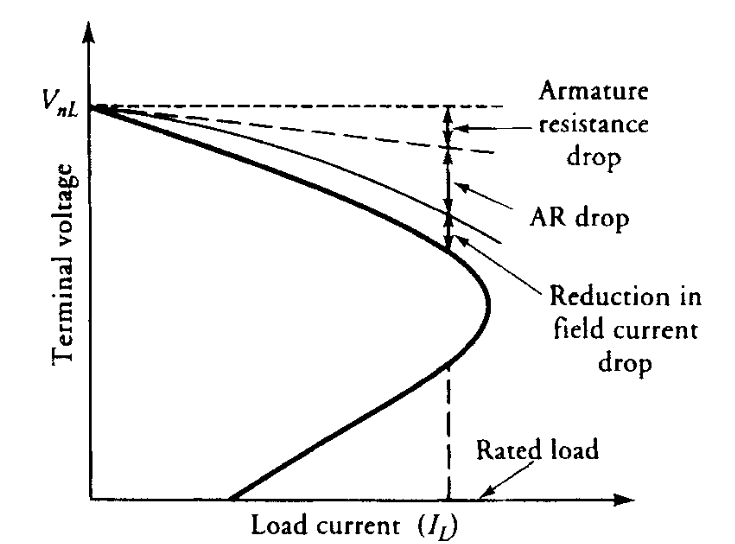
גנרטור טורי (Series Generator)
כפי שמשתמע מהשם, ליפוף השדה של גנרטור טורי מחובר בטור עם העוגן והמעגל החיצוני. מאחר שליפוף השדה הטורי נושא את זרם העומס המלא, הוא בנוי ממספר כריכות נמוך של חוט עבה. באיור הבא מוצג המעגל השקול של גנרטור טורי:
מעגל שקול של גנרטור טורי. (Guru, 2001).
לעיתים מחברים נגד משתנה
במצב ללא עומס, השטף שמייצר ליפוף השדה הטורי הוא אפס, ולכן מתח ההדקים שווה לכא”מ המושרה מהשטף השיורי בלבד,
- נפילות מתח על התנגדות ליפוף העוגן
וליפוף השדה הטורי - השפעה מנטרלת של תגובת העוגן
מאחר שנפילות המתח על הנגדים ותגובת העוגן תלויות בזרם העומס, גם הכא”מ המושרה וגם מתח ההדקים תלויים בזרם העומס.
עקומת המגנטיזציה של גנרטור טורי מתקבלת כאשר מעוררים בנפרד את ליפוף השדה הטורי. מתח ההדקים לכל נקודה על העקומה קטן מהכא”מ המושרה בגובה נפילות המתח על
אופיין של גנרטור טורי. (Guru, 2001).
כאשר זרם העומס מגדיל את השטף עד לאזור הרוויה, כל עלייה נוספת בזרם גורמת לתגובת עוגן חזקה שמביאה לירידה חדה במתח ההדקים – עד כדי כך שהמתח עלול לרדת לאפס. אופיין זה הופך את הגנרטור הטורי למתאים ליישומי הגברת מתח (voltage boosting).
הבדל עיקרי בין גנרטור שנט לטורי: גנרטור שנט שואף לשמור על מתח הדקים קבוע, בעוד גנרטור טורי שואף לספק זרם עומס קבוע. לדוג’ באירופה, שיטת Thury להולכת זרם ישר במתח גבוה השתמשה במספר גנרטורים טוריים בטור להעברת זרם קבוע.
המשוואות הבסיסיות של גנרטור טורי:
כאשר:
– זרם ליפוף השדה הטורי – התנגדות ליפוף השדה הטורי – זרם בנגד המעקף (diverter) – התנגדות המעקף