תרגיל בית 3
| סטודנט א’ | סטודנט ב’ | |
|---|---|---|
| שם | עידו פנג בנטוב | ניר קרל |
| ת”ז | CLASSIFIED | CLASSIFIED |
| דואר אלקטרוני | CLASSIFIED | CLASSIFIED |
תרגיל 1
סעיף א’
נניח כי האיטרציות מתכנסות לפתרון
נציב בשיטה:
היות ו-
סעיף ב’
נציב
זוהי הצורה המטריציונית של שיטת יעקובי.
סעיף ג’
כתיב אינדקסי לצורה המטריציונית האחרונה שקיבלנו, רק הפעם לא נציב
סעיף ד’
נרשום את השיטה האיטרטיבית בצורה מטריציונית כך שנקבל משוואה מהצורה:
נשים לב שהיא כבר נתונה לנו בהתחלה בצורה זו ולכן:
תנאי מספיק והכרחי להתכנסות הוא שהרדיוס הספקטרלי
נמצא ע”ע של
נתון ש-
נשווה מקדמים בין שתי המשוואות שקיבלנו:
קיבלנו שהע”ע העצמיים,
הרדיוס הספקטרלי של
כאשר בשוויון השלישי לקחנו בחשבון את הנתון ש-
נדרוש ש-
או:
לסיכום:
סעיף ה’
קצב ההתכנסות נתון ע”י:
כלומר, נצטרך למצוא מתי הביטוי ב-
כדי לקבל שהביטוי
לכן קצב ההתכנסות יהיה:
תרגיל 2
סעיף א’
סעיף ב’
סעיף ג’
close all
clear;
clc;
A = [1, 0, 0, 0, 0, 1/sqrt(2);
0, 0, 0, 1, 0, 1/sqrt(2);
0, 1, 0, 0, 1, 0;
0, 0, 1, -1, 0, 0;
0, 0, 0, 0, 1, 1/sqrt(2);
0, 0, 0, 0, 0, 1/sqrt(2)];
x_ans = [1;-1;1;1;1;-sqrt(2)];
b = [0;0;0;0;0;-1];
A_T = A';
A_tilde = A_T*A;
b_tilde = A_T*b;
k = 50;
x_jacobi = zeros(length(x_ans),1);
for i = 1:k
prev_x = x_jacobi(:);
x_jacobi = jacobi(A_tilde, b_tilde, x_jacobi);
r_j(i) = norm(A_tilde*x_jacobi-b_tilde, inf);
d_j(i) = norm(x_jacobi - prev_x, inf);
e_j(i) = norm(x_jacobi - x_ans, inf);
end
figure()
axes('XScale', 'linear', 'YScale', 'log')
hold on;
plot(1:k, r_j, "-");
plot(1:k, d_j, "-");
plot(1:k, e_j, "-");
x_gz = zeros(length(x_ans),1);
for i = 1:k
prev_x = x_gz(:);
x_gz = gz(A_tilde, b_tilde, x_gz);
r_gz(i) = norm(A_tilde*x_gz-b_tilde, inf);
d_gz(i) = norm(x_gz - prev_x, inf);
e_gz(i) = norm(x_gz - x_ans, inf);
end
plot(1:k, r_gz, "-");
plot(1:k, d_gz, "-");
plot(1:k, e_gz, "-");
legend("r Jacobi", "d Jacobi", "e Jacobi", "r GZ", "d GZ", "e GZ");
hold off;function x_k_1 = jacobi(A, b, x_k)
x_k_1 = x_k;
for i = 1 : length(x_k)
sum = 0;
for j = 1:length(x_k)
if j ~= i
sum = sum + A(i,j)*x_k(j);
end
end
x_k_1(i) = (1/A(i,i))*(b(i)-sum);
end
end
function x_k_1 = gz(A, b, x_k)
x_k_1 = x_k;
for i = 1 : length(x_k)
sum = 0;
for j = 1:i-1
sum = sum + A(i,j)*x_k_1(j);
end
for j = i:length(x_k)
sum = sum + A(i,j)*x_k(j);
end
x_k_1(i) = x_k(i) + (1/A(i,i))*(b(i)-sum);
end
end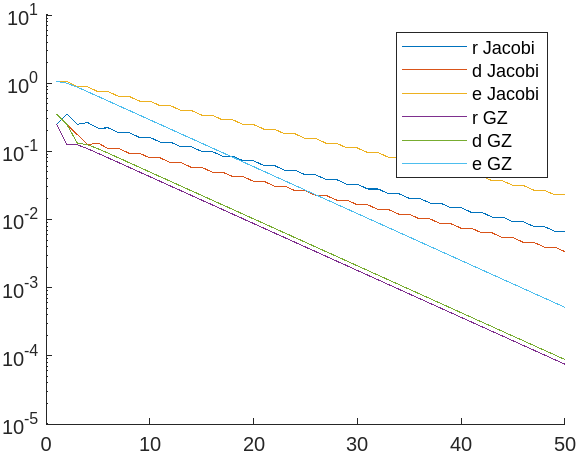
לפי הגרף ניתן לראות ש-
כלומר בכמות איטרציות נמוכה הנורמות של
סעיף ד’
G = eye(length(A_tilde)) - diag(diag(A_tilde))\A_tilde;נחשב נורמה של matlab:
>> norm(G, inf)
ans =
1.0607ולכן:
כאשר
סעיף ה’
נחשב את הע”ע של matlab:
>> eig(G)
ans =
-0.9239
-0.3827
0.3827
0.9239
0.7071
-0.7071ולכן, מאחר ו-
ניתן לומר ששיטת יעקובי מתכנסת כי
סעיף ו’
[a ,eig_G] = eig(G);
values = diag(eig_G);
max_val_abs = max(abs(values));
figure()
axes('XScale', 'linear', 'YScale', 'log')
hold on;
rho_G_vec = arrayfun(@(n) max_val_abs^n, 1:k);
plot(1:k, rho_G_vec, "-");
plot(1:k, e_j, "-");
legend("rho G", "norm e");
hold off;function x_k_1 = SOR(A, b, x_k, w)
x_k_1 = x_k;
for i = 1 : length(x_k)
sum = 0;
for j = 1:i-1
sum = sum + A(i,j)*x_k_1(j);
end
for j = i:length(x_k)
sum = sum + A(i,j)*x_k(j);
end
x_k_1(i) = x_k(i) + (w/A(i,i))*(b(i)-sum);
end
end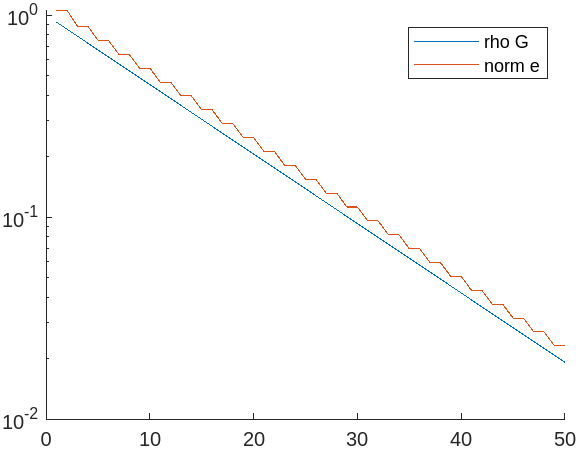
מהגרף ניתן לראות ש-
סעיף ז’
figure();
axes('XScale', 'linear', 'YScale', 'log')
hold on;
for w = 0.75:0.25:1.75
x_SOR = zeros(length(x_ans),1);
e_SOR = zeros(k, 1);
for i = 1:k
x_SOR = SOR(A_tilde, b_tilde, x_SOR, w);
e_SOR(i) = norm(x_SOR - x_ans, inf);
end
semilogy(1:k, e_SOR, "-");
end
legend('w = 0.75', 'w = 1.00', 'w = 1.25', 'w = 1.50', 'w = 1.75')
hold off;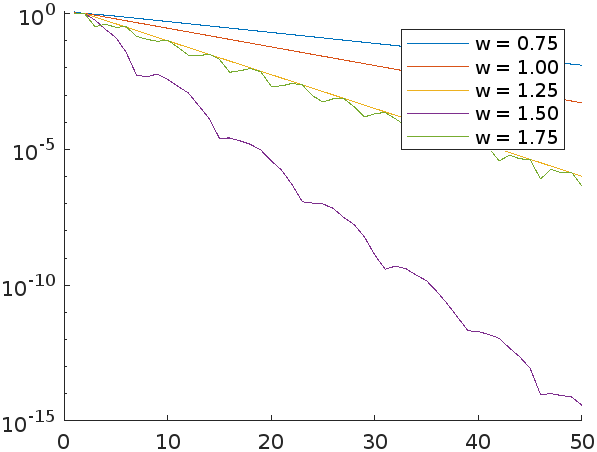
מהגרף ניתן לראות שהשיטה מתכנסת הכי מהר עבור