Introduction
We shall introduce the general system
Its solutions could be visualizes as trajectories flowing through an
- The word system is being used here in the sense of a dynamical system, not in the classical sense of a collection of two or more equations. Thus, even a single equation can be a “system”.
- We do not allow
A Geometric Way of Thinking
Consider the following nonlinear differential equation:
We separate the variables and then integrate:
which implies
which implies
To evaluate the constant
This result is exact, but a headache to interpret. For example, can you answer the following questions?
- Suppose
- For an arbitrary initial condition
In contrast, a graphical analysis of (SS2.1) is clear and simple, as shown in Figure 2.1. We think of
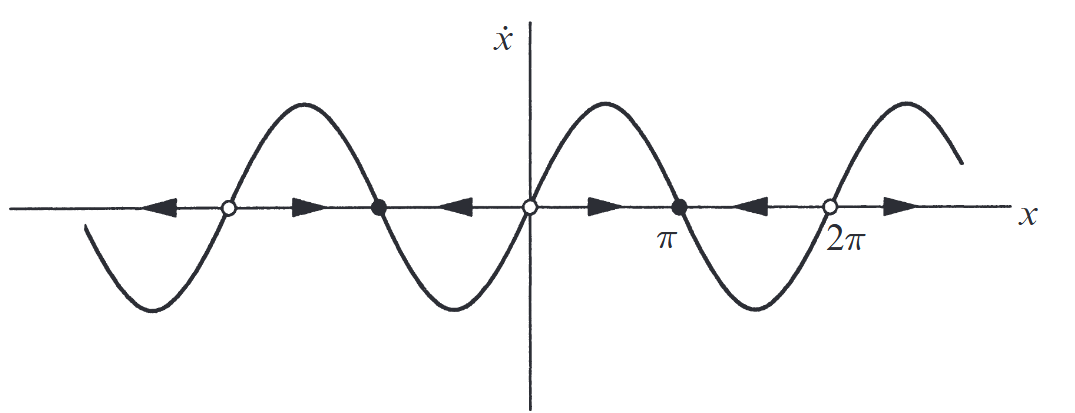
Figure 2.1: Graphical analysis of (SS2.1). (Strogatz, 2019).
A more physical way to think about the vector field is to imagine that fluid is flowing steadily along the
This approach allows us to answer the question above as follows:
- Figure 2.1 shows that a particle starting at
Note that the curve is concave up at first, and then concave down; this corresponds to the initial acceleration for
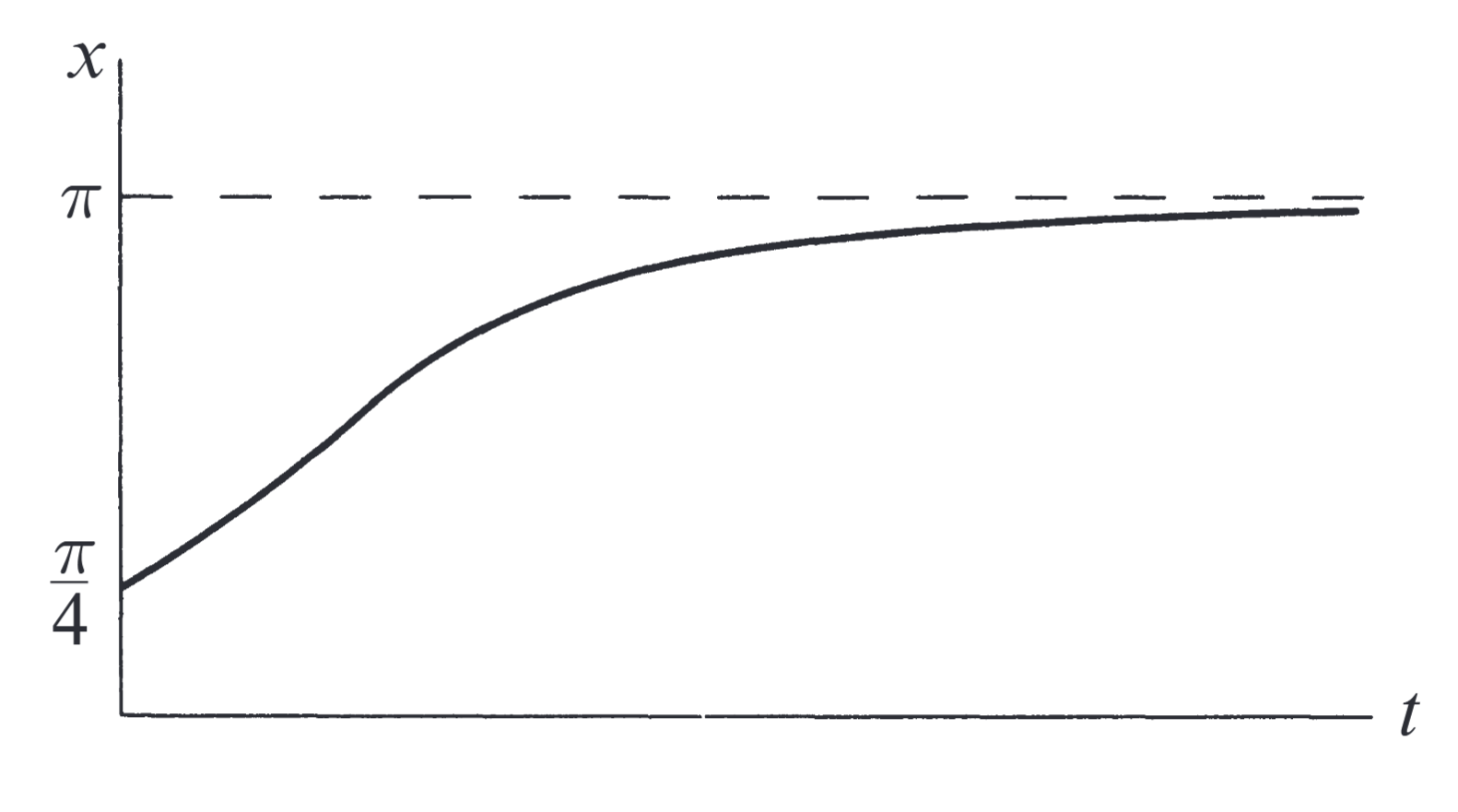
Figure 2.2: Solution of (SS2.1) for
. (Strogatz, 2019).
The same reasoning applies to any initial condition
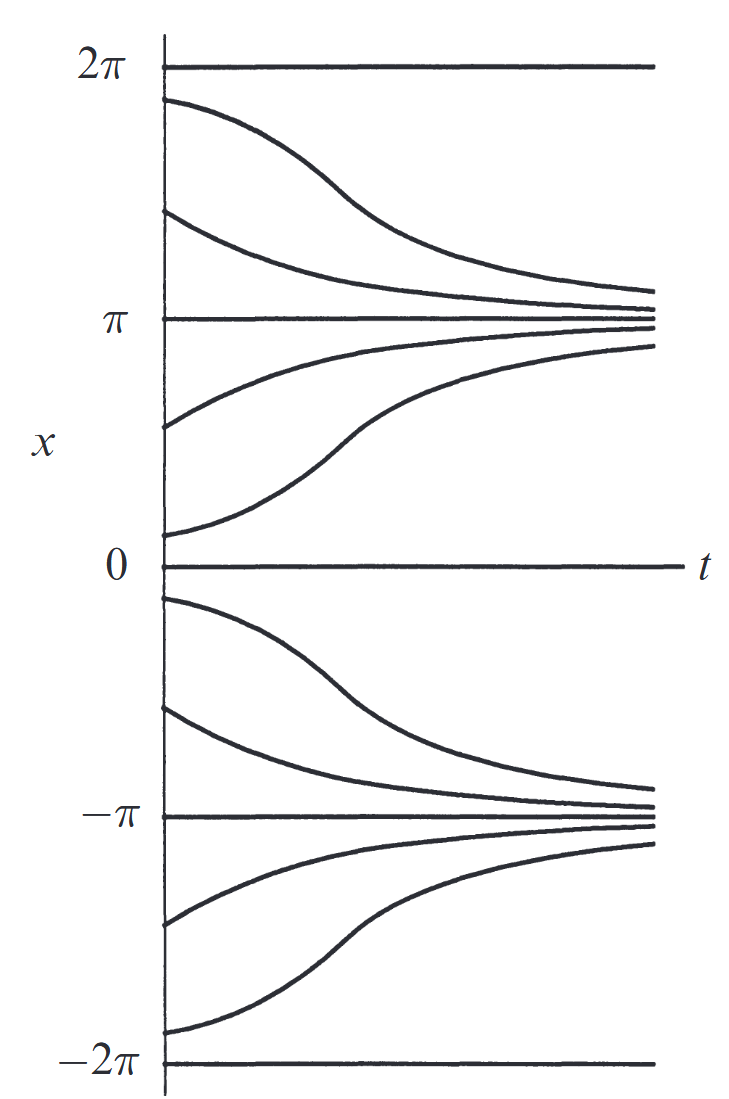
Various solutions of (SS2.1) for different initial conditions
. (Strogatz, 2019).
Notes:
From here on out, the chapter repeats a lot of material covered in Linear Systems, Vibrations, and more.