מבוא
בפרק הקודם, הצהרנו כי גנרטור הוא מכונה הממירה אנרגיה מכנית לאנרגיה חשמלית. כאשר מכונה ממירה אנרגיה חשמלית לאנרגיה מכנית, היא נקראת מנוע. אין הבדל בסיסי לא במבנה ולא בפעולה של שתי המכונות. למעשה, אותה מכונה יכולה לשמש כמנוע או כגנרטור.
קיימים בעיקרון שני סוגי מנועים: מנועי זרם חילופין (AC) ומנועי זרם ישר (DC). מנוע AC ממיר הספק חילופין (משתנה בזמן) להספק מכני. כאשר מכונה ממירה הספק בלתי תלוי בזמן להספק מכני, אומרים שזהו מנוע DC. פרק זה מוקדש ללימוד מנועי DC.
כאשר רוב ההספק הנוצר, המועבר והנצרך הוא מהצורה AC, השימוש במנוע DC דורש התקנה של ציוד נוסף להמרת AC ל-DC. כדי להצדיק את העלות הנוספת של קומוטטור מצד אחד והתקנת ממירי AC-לDC מצד שני, מנוע DC מופעל רק כאשר ביצועיו עדיפים על אלו של מנוע AC. בביצועים עדיפים אנו מתכוונים פשוט לכך שמנוע DC מסוגל לבצע מה שלא ניתן להשיג בקלות עם מנוע AC.
לדוגמה, מנוע DC יכול לפתח מומנט התנעה הגבוה בכמה סדרי גודל ממנוע AC בגודל דומה. מנוע DC יכול לפעול במהירויות שלא ניתן להגיע אליהן עם מנוע AC. מנוע DC נמצא בשימוש נרחב במערכות בקרה כהתקן מיקום מכיוון שמהירותו כמו גם המומנט שלו ניתנים לבקרה מדויקת על פני טווח רחב. מנוע DC הוא, כמובן, בחירה הגיונית כאשר מקור הספק DC זמין בקלות.
היחידה הנומינלית לציון הספק הפלט של מנוע DC היא כוח סוס (
פעולת מנוע DC
מאחר שאין הבדל במבנה בין גנרטור DC למנוע DC, ניתן להשתמש בשלושת סוגי גנרטורי ה-DC הנדונים בגנרטורי DC גם כמנועי DC. לכן, קיימים שלושה סוגים כלליים של מנועי DC: שנט, טורי ומורכב. מנוע המגנט הקבוע (PM) הוא מקרה מיוחד של מנוע שנט עם צפיפות שטף אחידה (קבועה). ניתן גם להשתמש במנוע מעורר נפרד אם נשתמש במקור עזר לליפוף השדה. מכיוון שלא מעשי להשתמש בשני מקורות הספק - אחד לליפוף השדה ואחר למעגל העוגן - מנוע מעורר נפרד כמעט אינו קיים. עם זאת, ניתן להתייחס למנוע מעורר נפרד גם כמקרה מיוחד של מנוע שנט.
במנוע DC נוצר שדה מגנטי אחיד על ידי הקטבים שלו. מוליכי העוגן נאלצים לשאת זרם על ידי חיבורם למקור הספק DC כפי שמוצג באיור הבא:
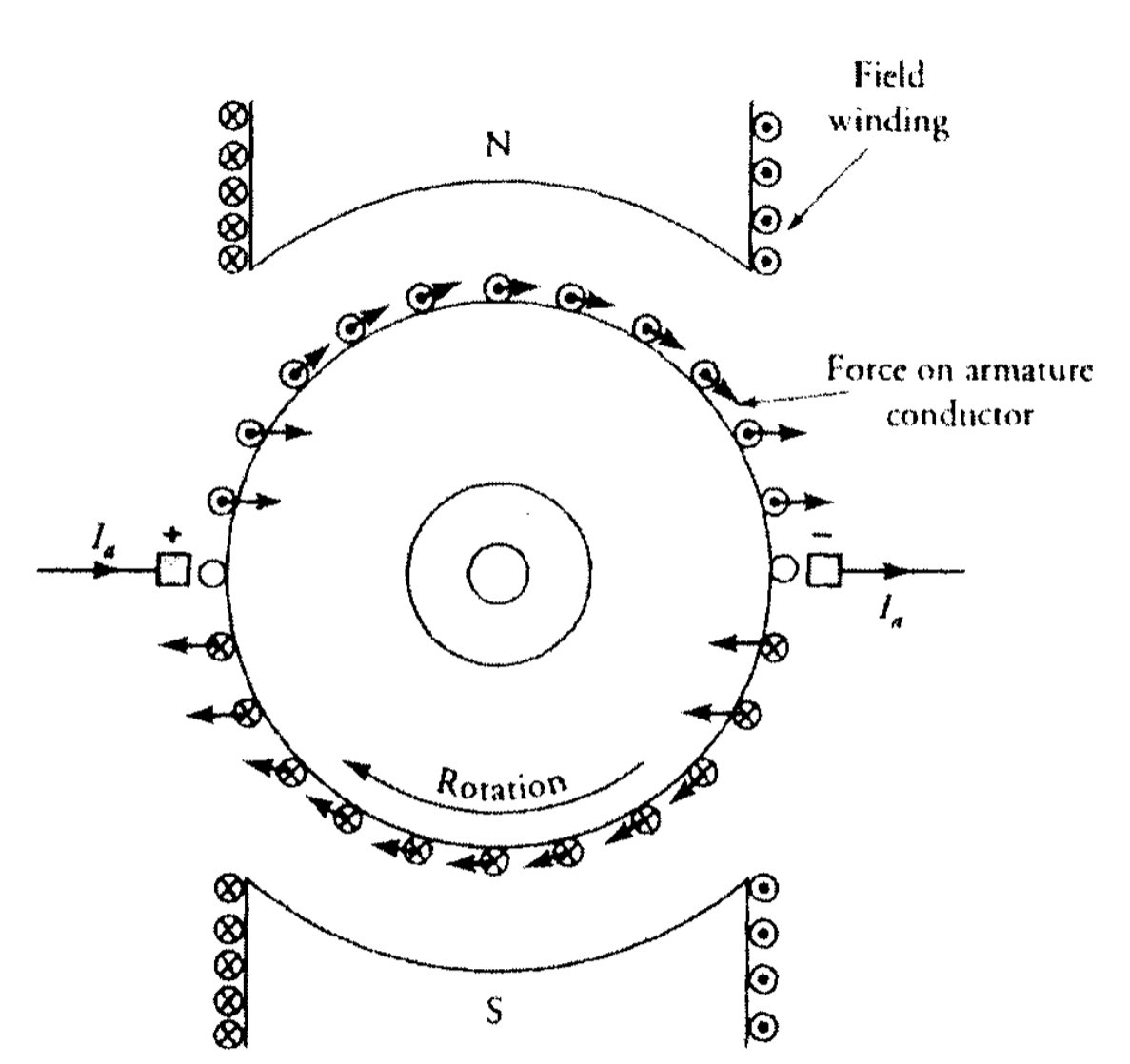
כוח הפועל על מוליכי העוגן במנוע DC דו-קוטבי. (Guru, 2001).
כיוון הזרם במוליכים תחת כל קוטב נשמר זהה על ידי הקומוטטור. על פי משוואת כוח לורנץ, מוליך נושא זרם הממוקם בשדה מגנטי חווה כוח הנוטה להניע אותו. זהו בעיקרון עקרון הפעולה של מנוע DC.
כל המוליכים הממוקמים בהיקף מנוע DC נתונים לכוחות אלו, כפי שמוצג באיור. כוחות אלו גורמים לעוגן להסתובב בכיוון השעון. לכן, עוגן מנוע DC מסתובב בכיוון המומנט המפותח על ידי המנוע. מסיבה זו, המומנט המפותח על ידי המנוע נקרא מומנט הנעה.
יש לציין שהמומנט המפותח על ידי המוליכים הממוקמים על עוגן גנרטור DC הוא בכיוון מנוגד לתנועתו. לכן, ניתן לכנותו מומנט מעכב. גודל המומנט הממוצע המפותח על ידי כוחות אלו חייב להיות זהה בשתי המכונות, מאחר שלא משנה אם הזרם נאלץ לעבור דרך מוליכי העוגן על ידי מקור הספק חיצוני או שהוא תוצאה של הכא”מ המושרה במוליכים. כך:
כאשר
כאשר העוגן מסתובב, כל סליל על העוגן חווה שינוי בשטף העובר דרך המישור שלו. לכן, יש כא”מ מושרה בכל סליל. בהתאם לחוק פאראדיי, הכא”מ המושרה חייב להתנגד לזרם הנכנס לעוגן. במילים אחרות, הכא”מ המושרה מתנגד למתח המופעל. מסיבה זו, אנו מכנים בדרך כלל את הכא”מ המושרה במנוע כא”מ הפוך או כא”מ נגדי של המנוע.
הערך הממוצע של הכא”מ המושרה בהדקי העוגן חייב, עם זאת, להיות זהה לזה של גנרטור DC מכיוון שלא משנה באמת אם העוגן מונע על ידי מניע ראשוני או על ידי מומנט הנעה עצמי. כך:
כאשר
אם
משוואה זו יכולה להיכתב גם כ:
מאחר שהתנגדות מעגל העוגן
התנעת מנוע DC
בזמן ההתנעה, הכא”מ הנגדי במנוע הוא אפס מכיוון שהעוגן אינו מסתובב. עבור ערך קטן של התנגדות מעגל העוגן
כדי להתניע מנוע DC, יש להוסיף התנגדות חיצונית בטור עם מעגל העוגן, כפי שמוצג באיור הבא עבור מנוע PM.
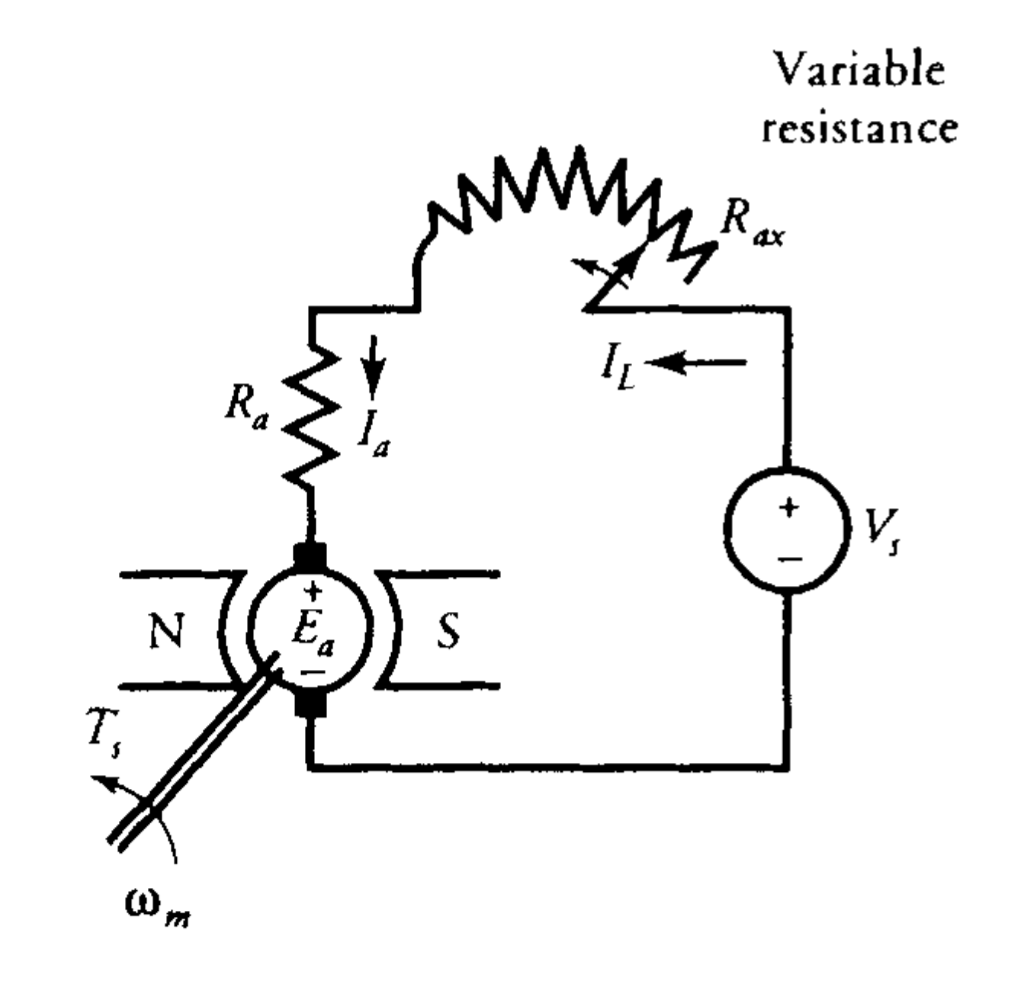
התנגדות משתנה המוכנסת בטור עם מעגל העוגן במהלך התנעת מנוע DC (PM). מ-(Guru, 2001).
ההתנגדות החיצונית מופחתת בהדרגה כאשר העוגן מגיע למהירות הנומינלית. לבסוף, כאשר העוגן הגיע למהירותו הרגילה, ההתנגדות החיצונית “מנותקת” ממעגל העוגן.
תגובת עוגן
תורת הקומוטציה ותגובת העוגן כפי שהוסברה בפרק קודם עבור גנרטורי DC חלה גם על מנועי DC. ההבדל היחיד הוא שכיוון הזרם במוליך תחת קוטב במנוע DC מנוגד לזה בגנרטור עבור אותו כיוון סיבוב. לכן, השדה הנוצר על ידי זרם העוגן ב-מנוע DC מנוגד בכיוון לזה הנוצר על ידי הזרם בעוגן גנרטור DC. מאחר שהמברשות הוקדמו כדי להבטיח קומוטציה טובה ב-גנרטור DC, יש לעכב אותן ב-מנוע DC.
אם למכונת DC יש אינטרפולים, הקוטביות שלהם עבור מנוע DC חייבת להיות מנוגדת לזו של גנרטור DC. מאחר והאינטרפולים נושאים זרם עוגן וזרם העוגן כבר בכיוון הפוך, קוטביות האינטרפולים מתהפכת אוטומטית. הדבר נכון גם לליפופי הפיצוי. לכן, אין צורך בפעולה כאשר גנרטור DC המתוכנן עם אינטרפולים או ליפופי פיצוי משמש כמנוע DC.
ויסות מהירות
זרם העוגן של מנוע גדל עם העומס. עבור מתח קבוע, העלייה בזרם העוגן גורמת לירידה בכא”מ הנגדי. הירידה בכא”מ הנגדי גורמת לירידה במהירות המנוע. ויסות המהירות הוא מדד לשינוי במהירות מאפס עומס עד עומס מלא. כאשר השינוי במהירות בעומס מלא מבוטא כאחוז ממהירות העומס המלא שלו, זה נקרא אחוז ויסות המהירות (
בצורת משוואה, אחוז ויסות המהירות הוא:
כאשר
כשנמשיך בדיוננו על מנועי DC, נצפה כי:
- מנוע טורי הוא מנוע מהירות משתנה מכיוון שוויסות המהירות שלו גבוה מאוד
- מנוע שנט הוא בעיקרון מנוע מהירות קבועה מכיוון שוויסות המהירות שלו קטן מאוד
- מנוע מורכב הוא מנוע מהירות משתנה מכיוון שוויסות המהירות שלו גבוה יותר מזה של מנוע שנט
הפסדים במנוע DC
כניסת ההספק למנוע DC היא חשמלית ויציאת ההספק היא מכנית. ההבדל בין כניסת ההספק ויציאת ההספק הוא הפסד ההספק. מנוע DC מציג את אותם הפסדי הספק כמו גנרטור DC.
כאשר ההספק
תרשים זרימת הספק טיפוסי של מנוע DC מוצג באיור הבא:
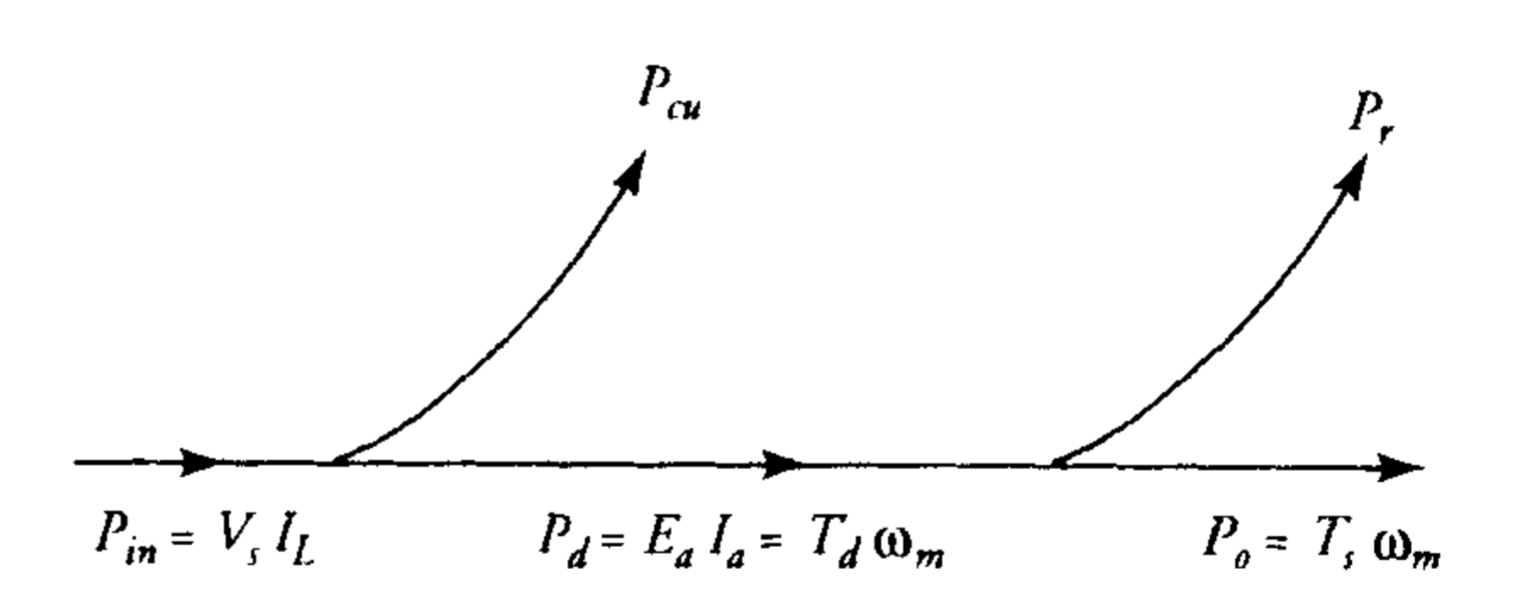
תרשים זרימת הספק במנוע DC. מ-(Guru, 2001).
מנוע טורי
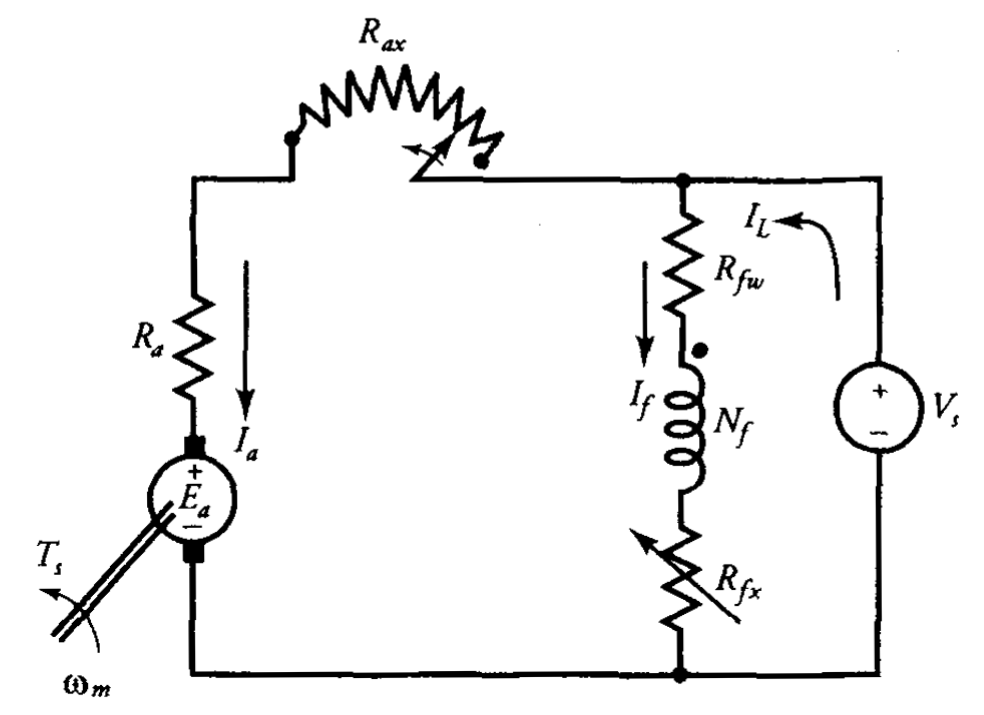
במנוע טורי ליפוף השדה מחובר בטור עם מעגל העוגן כפי שמוצג באיור הבא. כללנו גם התנגדות חיצונית
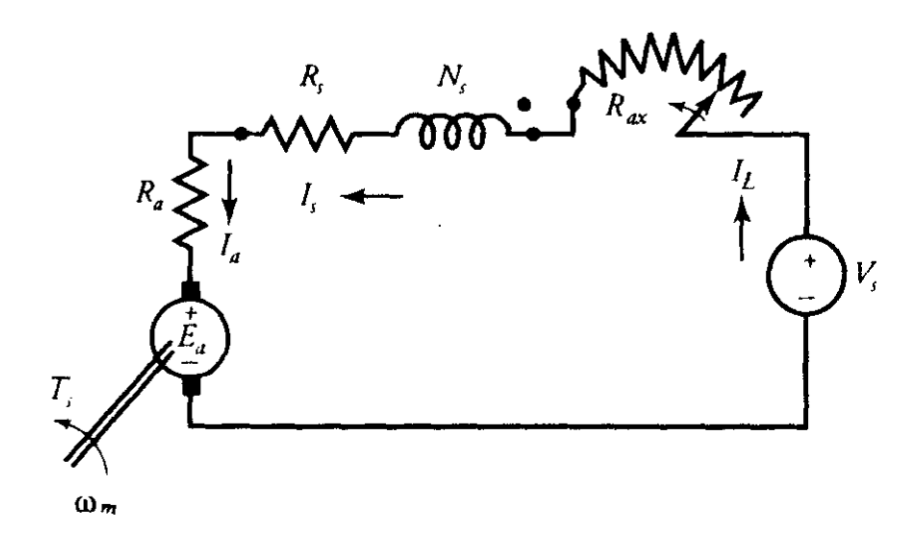
מעגל שקול של מנוע טורי עם התנגדות התנעה משתנה. (Guru, 2001).
מאחר וליפוף השדה הטורי נושא את זרם העוגן הנומינלי של המנוע, יש לו מעט כריכות של חוט עבה. כאשר זרם העוגן משתנה עם העומס, כך גם השטף המיוצר על ידי ליפוף השדה. במילים אחרות, השטף הנוצר על ידי מנוע טורי הוא פונקציה של זרם העוגן. אם השטף לכל קוטב ניתן לביטוי כ-
אז הכא”מ הנגדי הוא:
והמומנט המפותח על ידי המנוע הטורי הוא:
מהמשוואות לעיל, ברור שהכא”מ הנגדי במנוע פרופורציוני לזרם העוגן, והמומנט המפותח על ידי מנוע טורי פרופורציוני לריבוע זרם העוגן כל עוד המנוע פועל באזור הליניארי.
כאשר זרם העוגן גדל, כך גם השטף המיוצר על ידו. עלייה בשטף מגבירה את רמת הרוויה במנוע. כאשר המנוע רווי, השטף גדל רק בהדרגה עם עלייה נוספת בזרם העוגן. לכן, המומנט המפותח אינו עוד פרופורציוני לריבוע הזרם. מאפיין המומנט כפונקציה של זרם העוגן של מנוע טורי נתון באיור הבא:
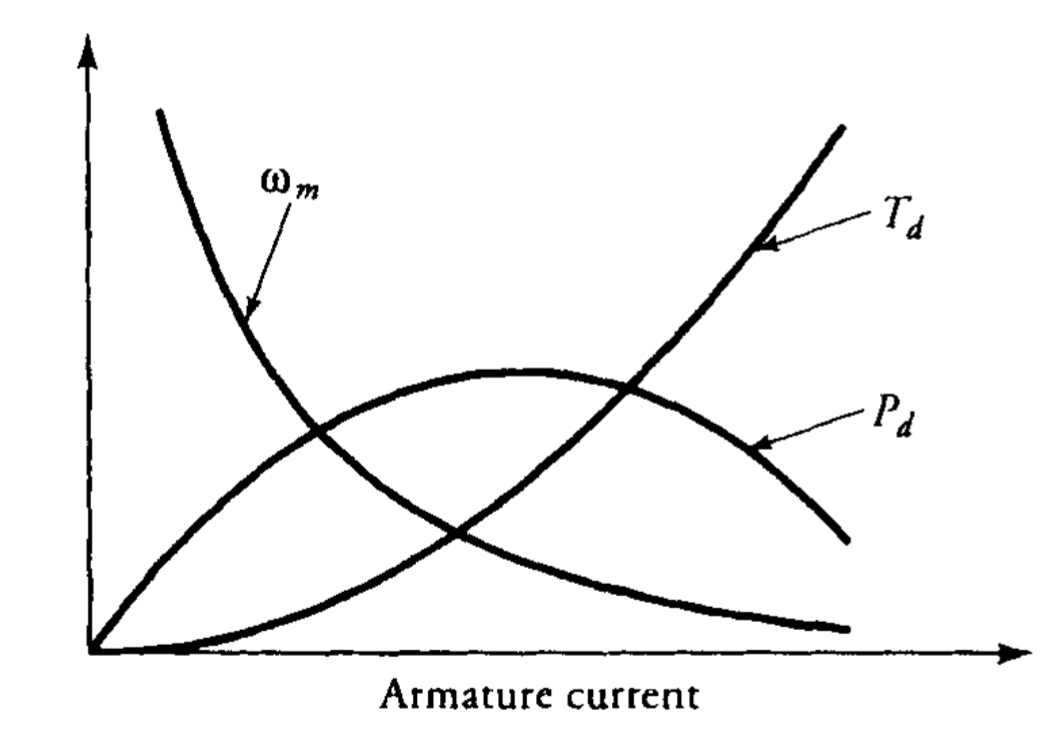
מומנט מפותח, הספק מפותח ומאפייני מהירות של מנוע טורי כפונקציה של זרם העוגן. (Guru, 2001).
כאשר מנוע טורי פועל תחת אפס עומס, המומנט המפותח על ידי המנוע מספיק רק כדי להתגבר על ההפסד הסיבובי במכונה. מאחר שההפסד הסיבובי הוא רק חלק קטן מהמומנט בעומס מלא, המומנט המפותח על ידי המכונה קטן מאוד תחת אפס עומס. ממשוואה (GU6.8), זרם העוגן חייב גם להיות קטן מאוד. לכן, הכא”מ הנגדי בריק חייב להיות כמעט שווה למתח המופעל
כאשר אנו מעמיסים את המנוע, המומנט המפותח על ידו חייב לגדול. העלייה במומנט מחייבת עלייה בזרם העוגן. העלייה בזרם העוגן גורמת לעלייה בנפילת המתח על פני התנגדות מעגל העוגן, התנגדות ליפוף השדה וההתנגדות החיצונית. עבור מתח מופעל קבוע, הכא”מ הנגדי חייב לרדת עם העומס. מאחר שהכא”מ הנגדי פרופורציוני גם לזרם העוגן, מהירות המנוע חייבת לרדת. האיור הבא מציג את מאפיין המומנט-מהירות של מנוע טורי.
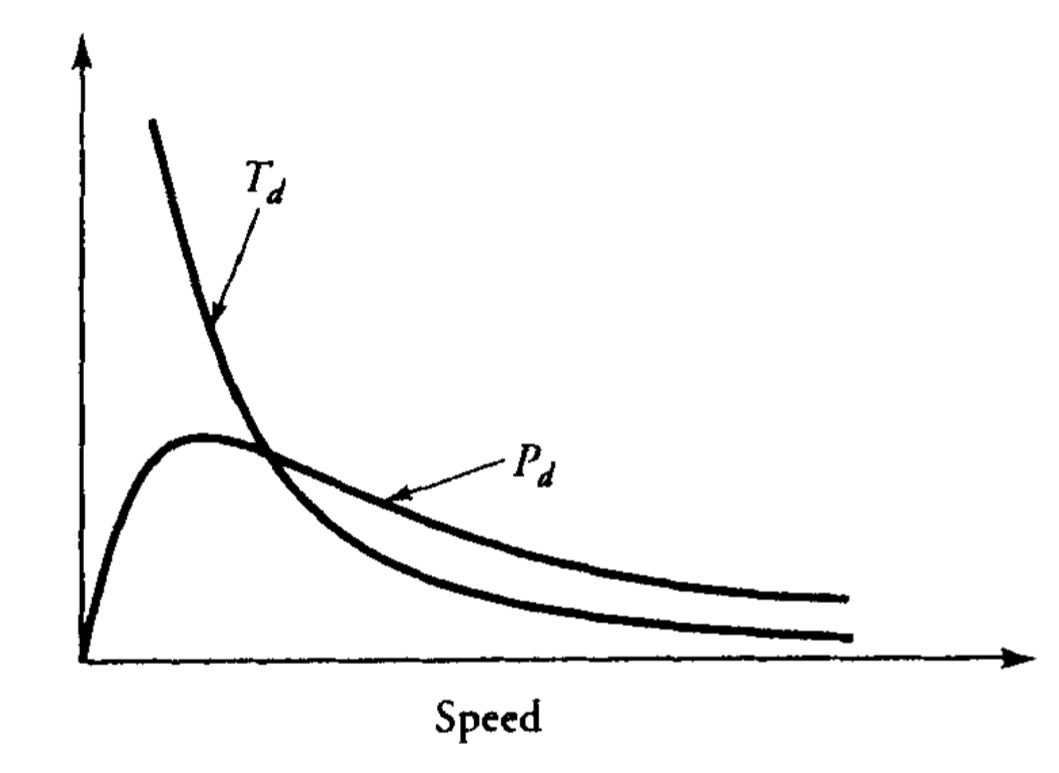
אופייני המומנט וההספק המפותח של מנוע טורי כפונקציה של המהירות. (Guru, 2001).
מהמעגל השקול:
כאשר
משוואה זו קובעת שמהירות מנוע טורי פרופורציונית הפוכה לזרם העוגן. נוכל לרשום את משוואה (GU6.9) כ-
המומנט המפותח, ממשוואה (GU6.8), יכול להירשם כעת כ:
ממשוואה זו ברור שלכל המטרות המעשיות, המומנט המפותח על ידי מנוע טורי פרופורציוני הפוך לריבוע המהירות שלו.
מנוע טורי מספק מומנט גבוה במהירות נמוכה ומומנט נמוך במהירות גבוהה. מסיבה זו, מנוע טורי מתאים למנופים, עגורנים, רכבות חשמליות ומגוון יישומים אחרים הדורשים מומנטי התנעה גדולים. מאחר שהמומנט המפותח על ידי מנוע טורי פרופורציוני גם לריבוע המתח המופעל, המומנט המפותח על ידו ניתן לבקרה על ידי בקרת המתח המופעל. לדוגמה, במהירות נתונה, הכפלת המתח המופעל גורמת להגדלת המומנט פי ארבע.
ההספק המפותח על ידי מנוע טורי הוא:
ההספק המפותח על ידי מנוע טורי עבור מתח מופעל קבוע הוא מקסימלי כאשר
ההספק המקסימלי המפותח על ידי מנוע טורי הוא:
לפעולה יציבה, טווח הפעולה של מנוע טורי נמוך הרבה מההספק המקסימלי המפותח על ידו.
מנוע שנט
המעגל השקול של מנוע שנט מוצג באיור הבא עם נגד התנעה במעגל העוגן. ליפוף השדה מחובר ישירות על פני המקור. עבור מתח מקור קבוע, השטף הנוצר על ידי ליפוף השדה קבוע.
מעגל שקול של מנוע שנט עם נגד התנעה במעגל העוגן. (Guru, 2001).
המומנט המפותח על ידי המנוע הוא:
כאשר
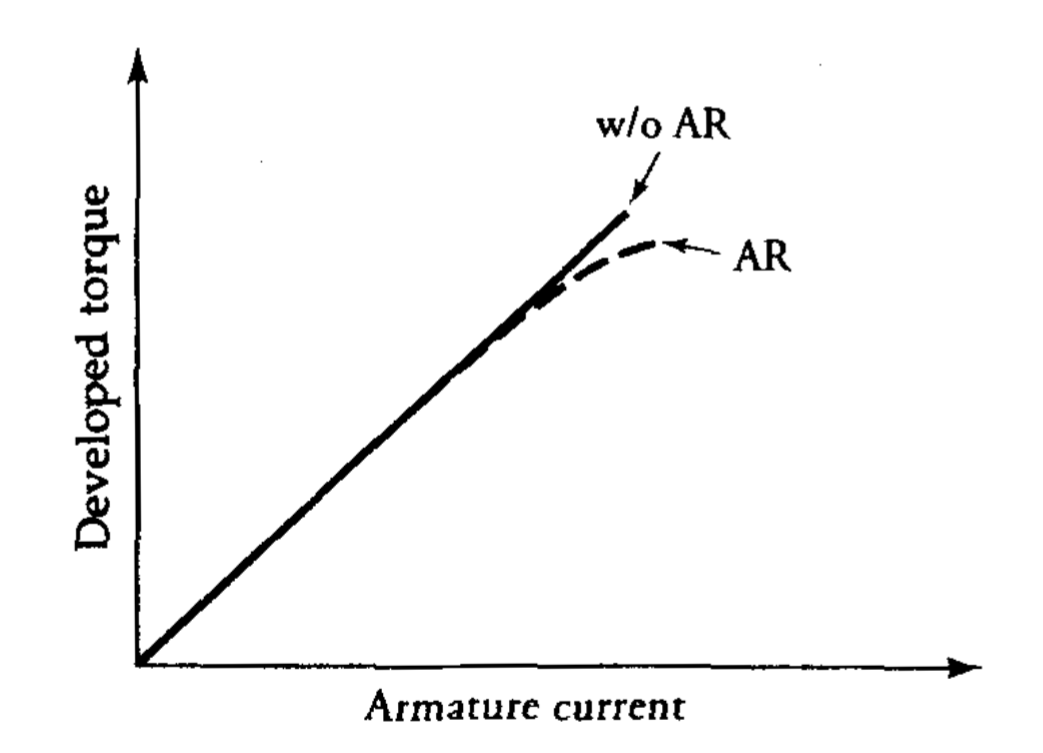
מומנט מפותח על ידי מנוע שנט כפונקציה של זרם העוגן עם תגובת עוגן (
) ובלי תגובת עוגן ( ). (Guru, 2001).
כאשר מנוע השנט מניע עומס מסוים, הכא”מ הנגדי של המנוע הוא:
מאחר ש-
למרות שאנו מפתחים יחסים במונחים של המהירות הזוויתית
כאשר העומס על המנוע גדל, רצף האירועים הבא מתרחש:
- זרם העוגן
- נפילת המתח על פני התנגדות מעגל העוגן
- עבור מתח מקור קבוע, הכא”מ הנגדי
- מאחר שהשטף קבוע כאשר תגובת העוגן זניחה, הירידה בכא”מ הנגדי של המנוע מלווה בירידה במהירותו כפי שמוצג באיור הבא (עקומה
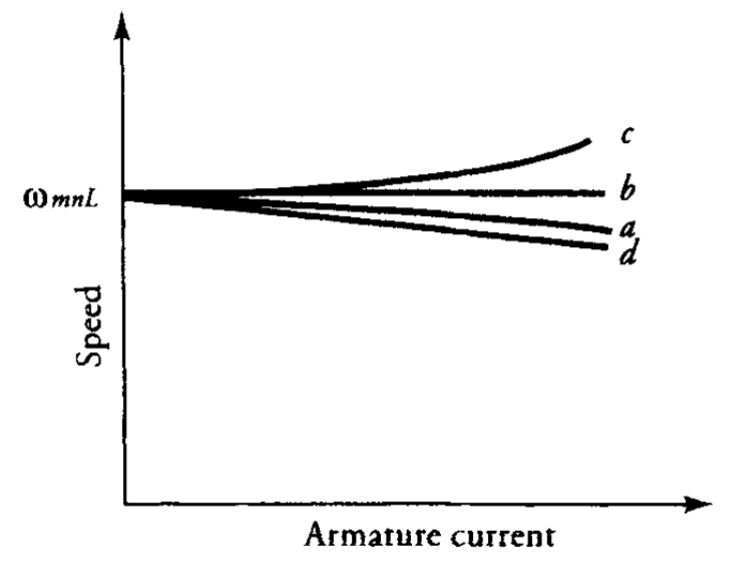
אופיין מהירות מול זרם עוגן של מנוע שנט. (Guru, 2001).
עם העלייה בזרם העוגן, תגובת העוגן הופכת משמעותית יותר אם המנוע אינו מפצה עבורה. העלייה בתגובת העוגן מקטינה את השטף במנוע, מה שגורם לעלייה במהירות. בהתאם לרוויה המגנטית של המנוע ולחומרת תגובת העוגן, העלייה במהירות עקב תגובת העוגן עשויה להיות קטנה יותר, שווה או גדולה יותר מהירידה במהירות עקב העלייה בזרם העוגן, כפי שמתואר באיור לעיל על ידי עקומות
עקומה
משוואה (GU6.16) יכולה להיכתב גם כ:
כאשר
אנו יכולים גם לקבל ביטוי למומנט המפותח במונחים של מהירות המנוע ממשוואות (GU6.14) ו-(GU6.16):
יחס הקו הישר הזה, המתואר באיור הבא, הוא אופיין המומנט-מהירות של מנוע שנט. הוא פשוט קובע שהמהירות גדלה כאשר העומס על המנוע קטן.
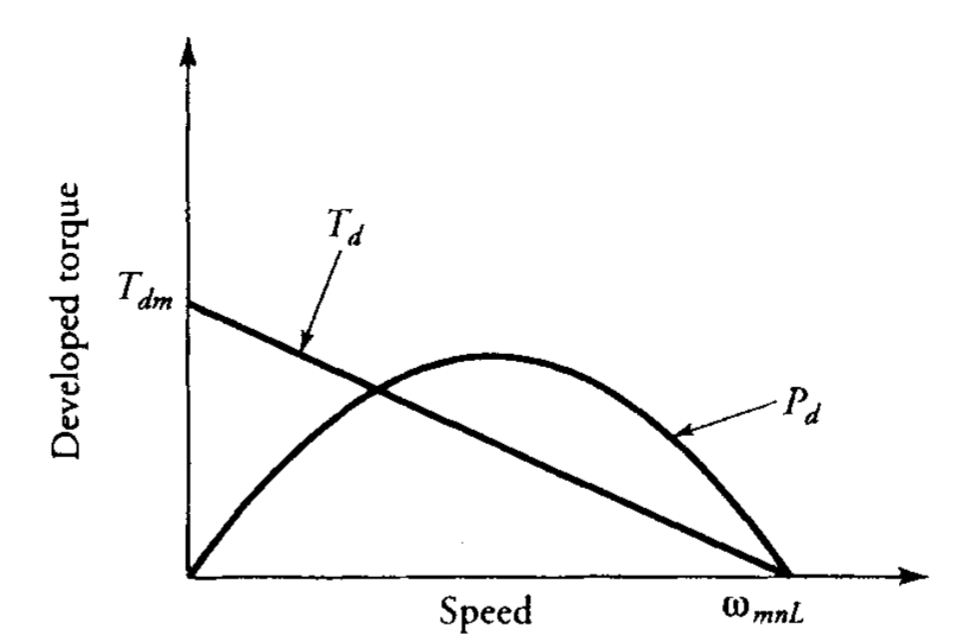
מומנט מפותח והספק מפותח כפונקציה של מהירות של מנוע שנט טיפוסי. (Guru, 2001).
באיור לעיל מוצג גם ההספק המפותח על ידי המכונה כפונקציה של מהירותה. אנו יכולים להראות שההספק המפותח על ידי מנוע שנט מקסימלי כאשר מהירותו שווה ל-