Analysis of Periodic Solutions
Many dynamical systems exhibit periodic solutions - trajectories that repeat after some period
These periodic orbits arise in various contexts:
Conservative systems such as the harmonic oscillator
Non-conservative systems can also exhibit isolated periodic orbits called limit cycles. A classic example is the Van der Pol oscillator:
For

Figure 6.1: Phase portrait of the Van der Pol oscillator showing the limit cycle (red) and trajectories spiraling toward it from both inside and outside.
Systems with periodic excitation of the form
Autonomous systems with feedback
Understanding the existence and stability of periodic solutions is crucial for:
- Predicting long-term behavior of oscillating systems
- Designing controllers for periodic tasks (walking, running, swimming)
- Analyzing bifurcations as system parameters vary
The Poincaré Map
The Poincaré map (also called the return map or first-return map) is a powerful tool for analyzing periodic solutions. It transforms the study of continuous-time dynamics into a discrete-time map, reducing the problem dimension and providing clear stability criteria.
Definition and Construction
Consider a dynamical system:
We define a Poincaré section
where

Figure 6.2: Geometric construction of the Poincaré map. A trajectory starting at
flows according to and returns to at time , defining .
The Poincaré map
where
Common choices for the Poincaré section include:
- Time-periodic sampling for systems with periodic forcing:
$$
\Sigma={ t=k{t}_{p},,k\in\mathbb{N} } - State-based section for autonomous systems:
$$
\Sigma={ \mathbf{x}:\sigma(\mathbf{x})=0 }
The section
Discrete-Time Dynamics
The Poincaré map transforms the continuous flow into a discrete-time dynamical system:
where
Note:
In most cases,
cannot be computed analytically - it requires numerical integration of the ODE from initial condition until the next event .
Fixed Points and Periodic Orbits
A fixed point
This corresponds to a periodic solution of the original continuous-time system
More generally, a period-
This corresponds to a periodic solution with period
Stability of Periodic Solutions
Linearization about the Fixed Point
To analyze the local stability of a periodic orbit, we linearize the Poincaré map about its fixed point. Define the deviation from the fixed point:
The linearized dynamics are:
where the Jacobian matrix (also called the monodromy matrix) is:
The solution of the linearized system is:
Stability Criterion
The behavior of
Theorem: Local Asymptotic Stability
The fixed point
is locally asymptotically stable if and only if all eigenvalues of lie strictly inside the unit circle:
This is the discrete-time analogue of the continuous-time criterion that eigenvalues must have negative real parts. The eigenvalues
Physical interpretation: Each eigenvalue
Graphical Analysis for 1D Maps
When the Poincaré map is scalar (1D), we can analyze it graphically. Plotting
- Fixed points are intersections with the line
- Stability is determined by the slope
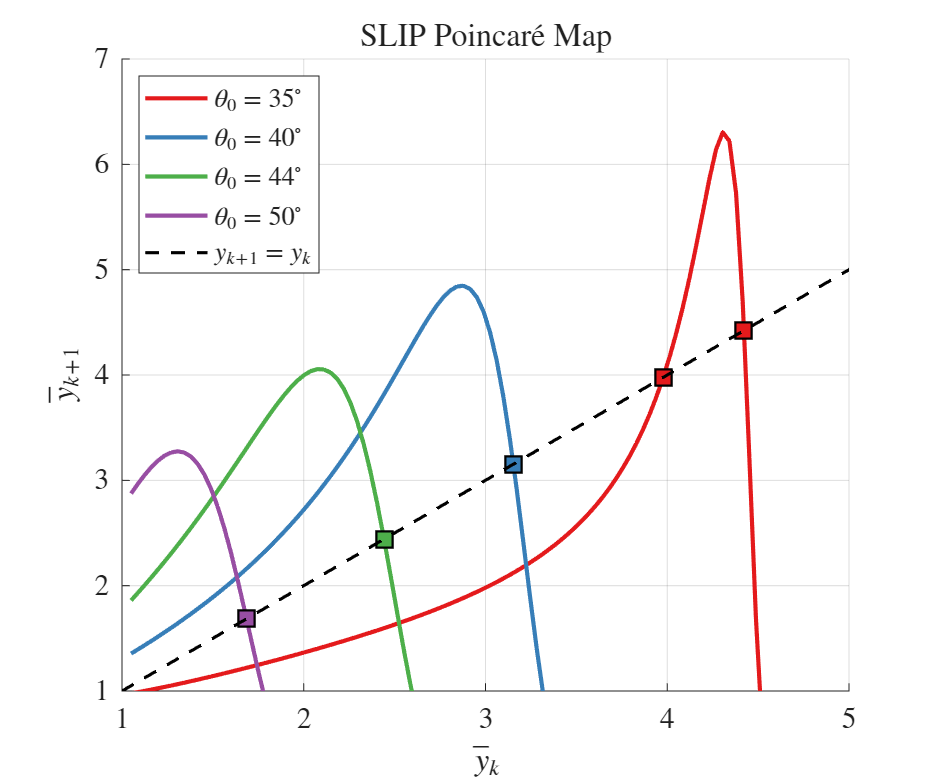
Figure 6.3: Poincaré map for the SLIP model showing
vs for different touchdown angles . Fixed points occur at intersections with the dashed line . Stability requires the curve to cross the diagonal with slope magnitude less than 1.
For even 2D maps, graphical visualization through contour plots of
Example: SLIP - Spring-Loaded Inverted Pendulum
The SLIP model (Spring-Loaded Inverted Pendulum) is a fundamental template for understanding dynamic legged locomotion, particularly running and hopping gaits. Despite its simplicity, it captures essential features of running dynamics observed in animals ranging from cockroaches to horses.

Figure 6.4: The SLIP model: a point mass
connected to a massless spring of stiffness and rest length . The leg touches down at angle and the system alternates between flight and stance phases.
Model Description
The SLIP consists of:
- A point mass
- A massless spring leg with stiffness
- Coordinates
The dynamics are piecewise-defined (hybrid):
Free flight (leg not in contact):
The leg angle can be set to a constant touchdown angle
Ground contact (when
Using polar coordinates
The first equation is the radial force balance (spring force, centrifugal, gravity). The second is angular momentum about the foot.
Poincaré Section
A natural choice for the Poincaré section is the apex of flight where vertical velocity is zero:
At apex, the state is characterized by:
- Apex height
- Horizontal velocity
- Horizontal position
Dimension reduction: The SLIP has translation invariance in
reduces the apex state to a single coordinate - the apex height
This yields a 1D Poincaré map of peak heights:
Fixed Points and Stability
Fixed points
Stability depends on the slope of the Poincaré map at the fixed point:
The SLIP Poincaré map depends on the touchdown angle
- For steep angles (large
- For shallow angles (small
- At intermediate angles, stable running gaits exist
Swing Leg Retraction
A simple control strategy that significantly improves stability is swing leg retraction:
where
This control law flattens the Poincaré map curve near the fixed point, reducing
TODO: לעבור
Example: The Rimless Spoked Wheel
The rimless wheel is the simplest model of passive dynamic walking. It consists of

Figure 6.5: The rimless spoked wheel with
spokes of length rolling down a slope of angle . The angle is measured from the vertical to the stance leg.
Continuous Dynamics
Between impacts, the wheel behaves as an inverted pendulum pivoting about the stance foot. The equation of motion is:
where the characteristic time is:
This can be rewritten in the familiar pendulum form using nondimensional time
Energy integral: Multiplying equation (6.19) by
where
Impact Law
When a new spoke touches the ground (at
- Frictionless, perfectly plastic impact (no bounce)
- Instantaneous transfer to the new stance leg
Angular momentum about the new contact point is conserved:
where the collision factor is:
Note that
Poincaré Map
We define the Poincaré section at the instant just after impact:
The state on
The Poincaré map
The pre-impact velocity at
After impact:
Fixed Point and Stability
Setting
Solving:
Therefore:
Stability: The derivative of the Poincaré map is:
Since
This remarkable result means that the rimless wheel naturally settles into a steady rolling gait without any control - it is passively stable. This insight was the foundation for the field of passive dynamic walking.
Friction Requirements
For the no-slip assumption to hold during stance, the friction force must not exceed the friction limit. The tangential-to-normal force ratio along the periodic orbit must satisfy:
Analysis shows that this ratio reaches its maximum magnitude near the impact events. For typical parameters, a friction coefficient

Figure 6.6: Phase plane trajectories (left) and friction force ratio (right) for the rimless wheel. The periodic orbit involves a sequence of parabolic arcs connected by impacts.
Passive Dynamics of the Compass Biped
The compass biped (or compass gait walker) extends the rimless wheel concept to a system with two legs that alternate as stance and swing limbs.

Figure 6.7: The compass biped model: two legs of length
with point masses at the feet and a hip mass . The walker descends a slope of angle through alternating single-support phases and impulsive leg exchanges.
Model Description
The compass biped consists of:
- Two massless legs of length
- Point masses
- Hip mass
- Slope angle
Configuration: During single support, the stance leg angle
Degrees of freedom: The system has 2 DOF during single support, giving a 4D state space
Poincaré Section
The natural Poincaré section is at heel-strike (impact + foot relabeling):
Due to the leg-exchange symmetry and kinematic constraint at impact, the effective state on
Periodic Orbits
Finding periodic gaits requires solving for fixed points of the 2D Poincaré map. Unlike the rimless wheel, this generally requires numerical methods.

Figure 6.8: Phase portrait of a stable compass biped walking cycle. The closed orbit shows the periodic evolution of
with impacts and foot relabeling events marked.
Research questions for the compass biped include:
- How to find periodic solutions numerically?
- How to analyze their stability?
- What happens with slip↔stick transitions?
These are addressed in the following sections on numerical methods.
Numerical Analysis of Periodic Solutions
In most practical cases, the Poincaré map
- Evaluating
- Finding fixed points
- Computing the Jacobian
Computing the Poincaré Map
To evaluate
- Set initial conditions: Convert the reduced state
- Integrate the ODE: Use a numerical integrator (e.g.,
ode45) with event detection - Detect section crossing: Stop integration when
- Extract return state: Convert full state back to reduced state
For hybrid systems, the integration must handle discrete jumps (impacts, mode switches) by incorporating the appropriate reset maps.
Finding Fixed Points
A fixed point satisfies
This is a system of
MATLAB’s fsolve is the standard tool:
[z_star, fval, exitflag, output, jacobian] = fsolve(@G, z0, options)where G is a function that computes
Notes:
fsolverequires an initial guessand finds only a single local solution - Multiple fixed points require multiple initial guesses or global search methods
- For 1D maps, graphical analysis can identify good initial guesses
Finding All Solutions
To locate all fixed points:
1D map: Plot
2D map: Compute

Figure 6.9: Contour plot of
for a 2D Poincaré map. Local minima (dark regions) indicate candidate fixed points to be refined with fsolve.
Higher dimensions: Use MATLAB’s MultiStart with multiple random initial guesses, or continuation methods that track solution branches as parameters vary.
Continuation method: If a fixed point
Stability of Periodic Solutions - Numerical Methods
Computing the Jacobian
After finding a fixed point
Finite difference approximation: The
where
Thus:
Using fsolve’s Jacobian: MATLAB’s fsolve can compute the Jacobian of
we have:
The eigenvalues are related by:
Stability Criterion
The periodic solution is locally asymptotically stable if all eigenvalues
Note:
Unlike forward-time simulation which can only find stable solutions,
fsolvecan locate both stable and unstable periodic orbits. This is valuable for understanding the global structure of the dynamics and bifurcations.
Special Cases of Jacobian Eigenvalues
- Translation-invariant systems with
- Systems with a conserved quantity: if
- Saddle-node:
- Period-doubling:
- Neimark-Sacker:
Dynamic Legged Locomotion - Hybrid and Periodic
Dynamic legged locomotion - walking, running, hopping - fundamentally differs from quasistatic locomotion because there is no equilibrium configuration. The system is perpetually falling and catching itself, relying on the interplay between gravitational acceleration and ground reaction forces.
This type of locomotion is ubiquitous in:
- Animals: insects, mammals, birds
- Humans: walking, running, jumping
- Legged robots: Boston Dynamics’ Spot and Atlas, RHex, various bipeds
The key insight from Poincaré map analysis is that stable periodic gaits can exist even in systems with no feedback control - purely passive dynamics. This concept of orbital stability (stability of a limit cycle rather than an equilibrium) is central to understanding efficient locomotion.
Passive Dynamic Walking
Passive walkers are mechanical devices that walk down shallow slopes with no motors or control - they are powered solely by gravity. Examples include:
- Two-link passive walker: The simplest biped, essentially a compass gait walker
- Passive walker with knees: Adds knee joints for more human-like gait
- 3D passive walkers: Extensions to three-dimensional motion
These devices demonstrate that:
- Stable walking gaits can arise from mechanical dynamics alone
- Efficient locomotion harnesses natural dynamics rather than fighting them
- Control should augment, not replace, the passive dynamics
Actuated Walking
Real walking robots and animals use actuation, but the insights from passive dynamics suggest:
- Harness natural dynamics: Design gaits that exploit the system’s natural oscillation modes
- Minimal intervention: Add control only where needed to maintain stability and handle disturbances
- Energy efficiency: Passive-dynamic-inspired designs can be remarkably energy-efficient
Robotic Locomotion Systems with Periodic Inputs
Many robotic locomotion systems use periodic inputs to generate motion:
- Kinematic actuation of joints: prescribing periodic joint trajectories
- Torque actuation: applying periodic torques
- Passive elastic joints: springs that store and release energy cyclically
The analysis framework using Poincaré maps applies directly to these systems. A key research question is:
Quote
Find open-loop inputs that induce passive stability of periodic motion
That is, design the periodic input
Example: RAPS Twistcar
The Rotor-Actuated Passive Steering (RAPS) Twistcar is a wheeled vehicle that propels itself through internal body oscillations.

Figure 6.10: The RAPS Twistcar: periodic actuation of the middle joint angle
induces steering and propulsion through the passive front wheel angle .
System description:
- Prescribed periodic input:
- Free passive DOF: front wheel steering angle
- Rolling dissipation at wheels
- State vector:
Dynamics: The reduced equations of motion have the form:
Periodic solutions: By varying the actuation frequency

Figure 6.11: Time evolution of the passive steering angle
for the RAPS Twistcar at different actuation frequencies. At , a stable periodic solution exists. At , the system converges to a different stable limit cycle.
Bifurcation analysis: As the frequency

Figure 6.12: Bifurcation diagram showing the fixed point value
(mean steering angle) vs actuation frequency . Solid lines indicate stable branches, dashed lines indicate unstable branches. A pitchfork bifurcation occurs near .
The bifurcation structure reveals:
- A symmetric solution branch (
- Two asymmetric branches that emerge from the bifurcation point
- Parameter regions of stable vs unstable periodic motion
Analysis of Locomotion Swimmers
Similar Poincaré map analysis applies to swimming locomotion in fluids:
Multi-link swimmers: Experiments and theory using “perfect fluid” models with kinematic joint actuation reveal frequency-dependent behavior and bifurcations.
Passive elastic joints: Adding springs at joints creates rich dynamics:
- Optimal actuation frequency for maximal displacement per cycle
- Stability depends on the interplay between actuation frequency and natural elastic frequency
- Bifurcations occur as frequency varies

Figure 6.13: Displacement per cycle vs actuation frequency for an elastic-joint swimmer. An optimal frequency exists that maximizes propulsion efficiency.
Micro-nano robotic swimmers: At small scales, swimmers in oscillating magnetic fields exhibit:
- Frequency-dependent stability
- 90° flip in swimming direction due to parametric excitation
- Behavior analogous to the Kapitza inverted pendulum
Purcell’s Swimmer
Purcell’s three-link swimmer is a canonical model for low-Reynolds-number locomotion:

Figure 6.14: Purcell’s three-link swimmer with joint angles
and . The swimmer moves by executing a non-reciprocal cycle in the shape space.
Near a wall: When the swimmer operates near a boundary, the dynamics change:
- The effective drag depends on distance to the wall
- Periodic swimming gaits have different stability properties
- The distance from the wall can evolve dynamically under periodic actuation
Shape stability under periodic torques: Instead of prescribing joint angles, one can apply periodic torques and study whether the resulting shape trajectory is stable:
- Stable periodic shapes lead to consistent swimming motion
- Unstable shapes cause erratic behavior
- Poincaré map analysis reveals the stability boundaries

Stability transition map in the frequency-amplitude plane for Purcell’s swimmer with periodic torque input. Regions of stable periodic motion are separated by bifurcation curves.
Summary
The Poincaré map provides a powerful framework for analyzing periodic solutions of dynamical systems:
- Dimension reduction: Converts continuous-time dynamics to a discrete-time map on a lower-dimensional section
- Fixed points = periodic orbits: Periodic solutions correspond to fixed points of the Poincaré map
- Stability via eigenvalues: Local stability is determined by eigenvalues of the Jacobian - all must be inside the unit circle
- Numerical methods:
fsolvefinds fixed points; finite differences approximate the Jacobian - Bifurcation analysis: Tracking how fixed points and their stability change with parameters reveals the system’s qualitative behavior
For hybrid dynamical systems (impacts, mode switches), the Poincaré map naturally incorporates discrete events, making it especially suited for analyzing:
- Legged locomotion (walking, running, hopping)
- Bouncing and impacting systems
- Systems with intermittent contact
The insights from Poincaré map analysis have practical implications for:
- Designing efficient locomotion controllers
- Understanding passive stability in mechanical systems
- Predicting bifurcations and regime changes as parameters vary