| סטודנט א’ | סטודנט ב’ | |
|---|---|---|
| שם | עידו פנג בנטוב | יובל הנדל |
| ת”ז | CLASSIFIED | CLASSIFIED |
| דואר אלקטרוני | CLASSIFIED | CLASSIFIED |
מספר תחנה: 4
תמסורת: 6221
קוד MATLAB נמצא בGitHub.
הערה של גל:
ציון:
2 תהליך הניסוי
2.1 קריאת ה-Encoder
שאלה 4
מהו הכיוון החיובי של ה-encoder?
ממבט-על על המערכת, ה-encoder חיובי עבור סיבוב עם כיוון השעון.
האם הקריאות בדידות או רציפות? למה?
הקריאות הן בדידות, וזה נובע מעצם אופן הפעולה של encoder. יש בו פיזית שנתות, ועבור כל אחת מהן, ה-encoder יודע להוציא רק ארבעה ערכים (בדידים) - אור, מעבר מאור לחושך, חושך, ומעבר מחושך לאור.
מה נוכל להסיק מעובדה זו ביחס לשגיאות המדידה והתנהגות המערכת?
מאחר והקריאות בדידות, הבקר לא יוכל להגיב בצורה מדויקת, ולפיכך יהיה לו מאוד קשה להגיע לנקודת שיווי משקל. במקרה למשל של מטוטלת הפוכה, בה קיימת נקודת שיווי משקל לא יציבה, הדיוק ככל הנראה לא יספיק על מנת להביא את המערכת ליציבות.
שאלה 5
מסיבוב
מאחר ובתחנה שלנו יש 500 שנתות, וארבעה פולסים עבור כל שנתה, נסיק שיחס התמסורת הוא:
שאלה 6
לפי הפרויקטון, קיבלנו ש:
ננרמל לצורה הסטנדרטית:
כך ש:
מהקטלוג, הפרמטרים עבור המנוע שלנו:
נציב את שאר הנתונים ונקבל את פונקציית התמסורת ביחידות של רדיאנים לוולט:
ביחידות של מעלות לוולט, זה יהיה:
2.2 בקר P
שאלה 11
מהפרויקטון, עבור בקר פרופורציוני, מצאנו שהייצוג מג”ש:
לכן הקטבים בחוג הפתוח:
-
עבור
מאחר ויש מספר אי זוגי של שורשים מימין, בין
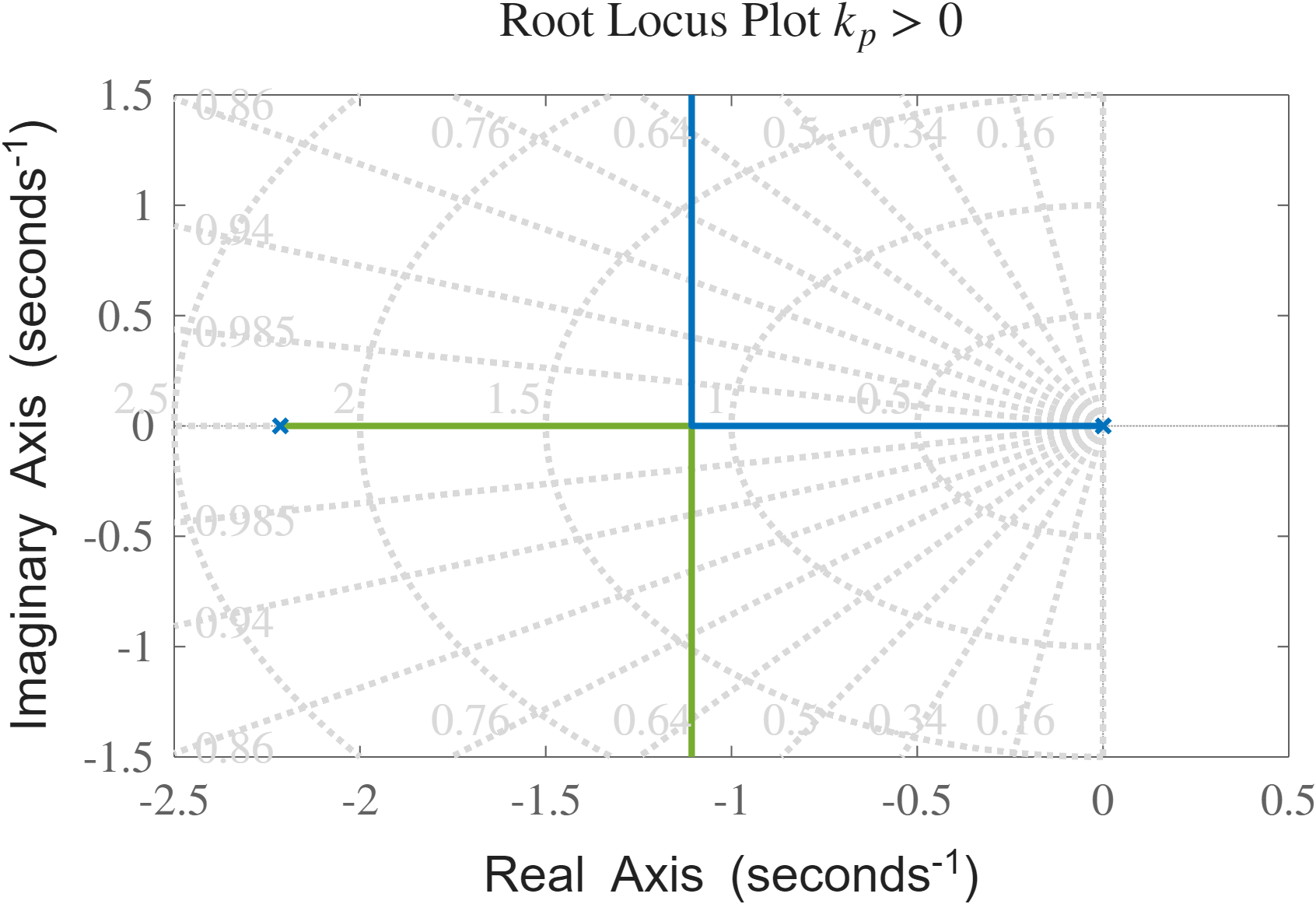
מג”ש המערכת עבור
נסיק שהמערכת יציבה עבור כל
-
עבור
מאחר ויש מספר זוגי של שורשים מימין ל-
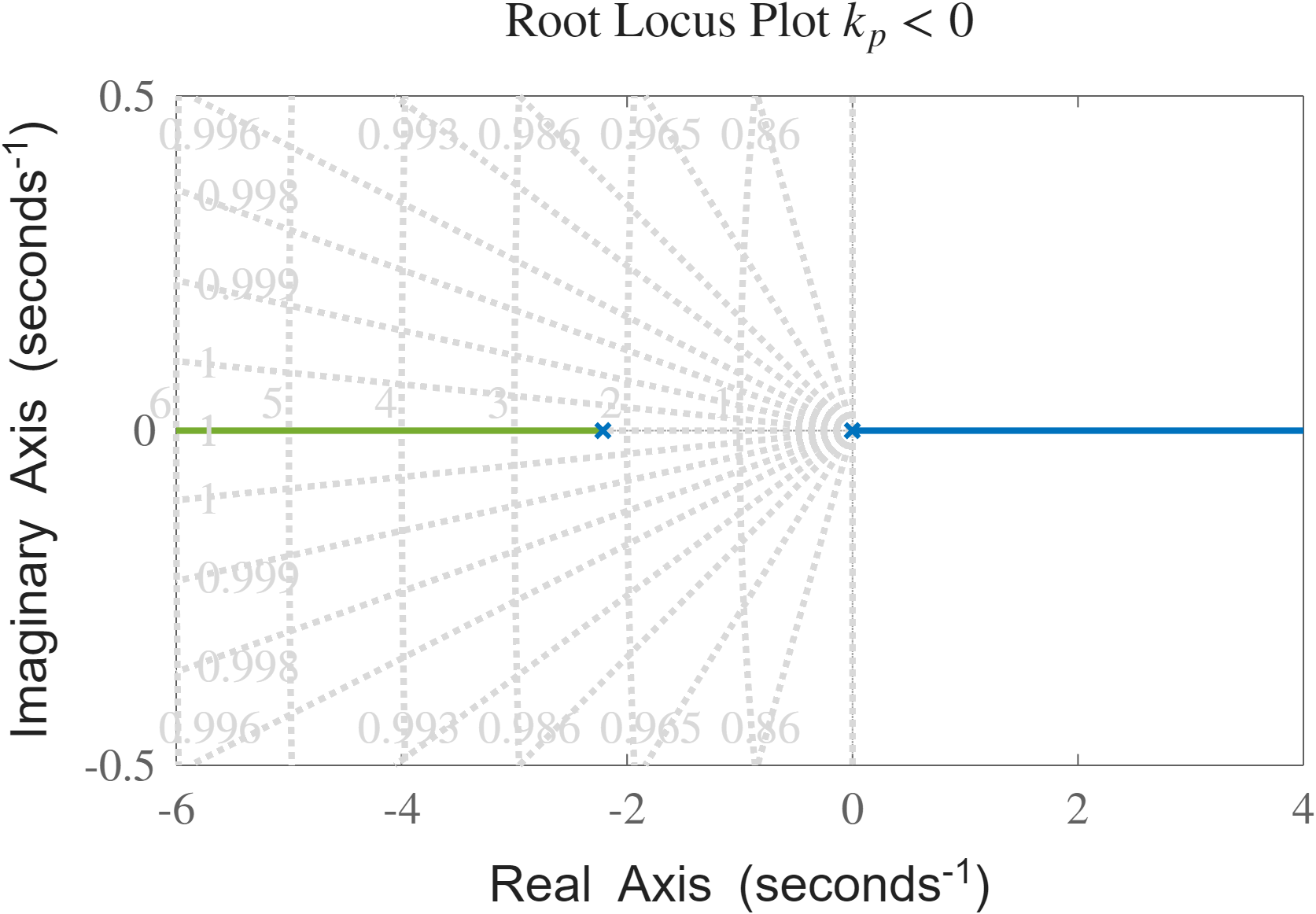
מג”ש המערכת עבור
נסיק שהמערכת לא יציבה עבור כל
שאלה 12
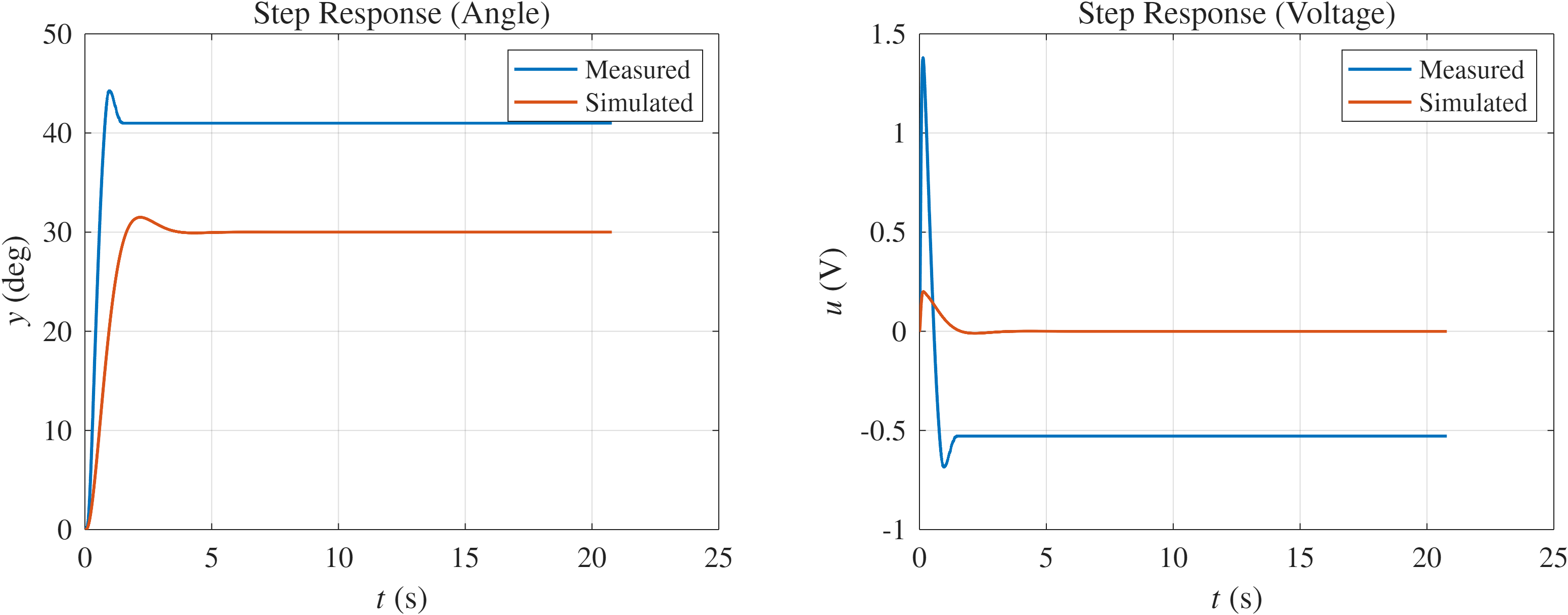
עבור
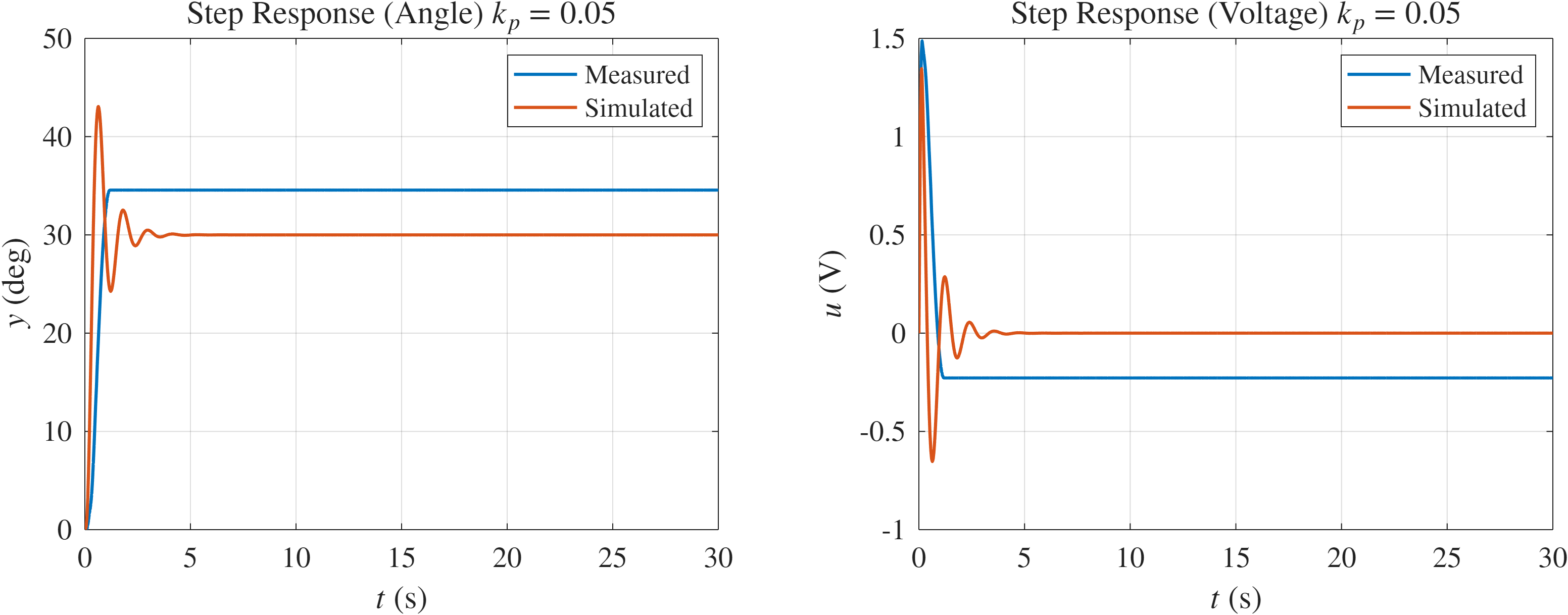
תגובת הזווית והמתח לכניסת מדרגה
עם 𝟙 .
מהקוד MATLAB אנו מקבלים ש:
Performance Metrics for k_p = 0.05:
Steady-State Error: 4.56
Settling Time: 1.0727
Overshoot: 0%
Rise Time: 0.6142
Max Input Voltage: 1.4873
עבור
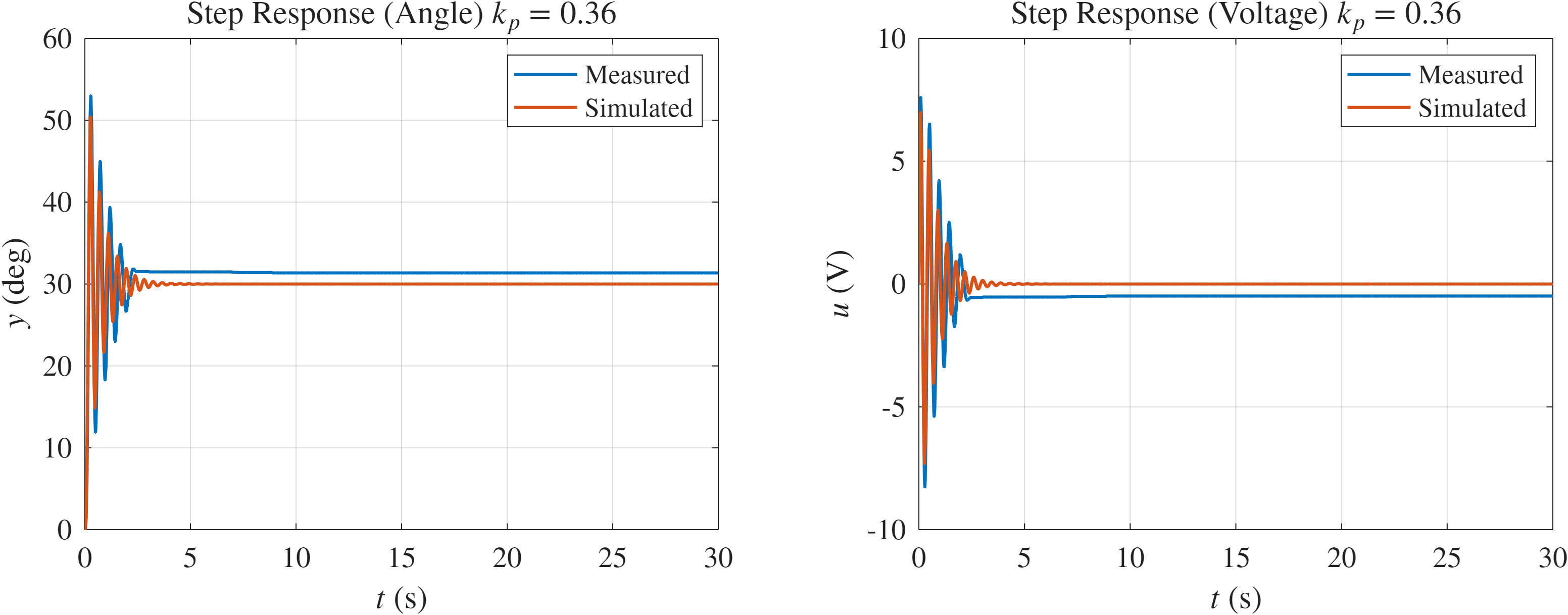
תגובת הזווית והמתח לכניסת מדרגה
עם 𝟙 .
Performance Metrics for k_p = 0.36:
Steady-State Error: 1.32
Settling Time: 2.1683
Overshoot: 69.0932%
Rise Time: 0.092637
Max Input Voltage: 7.5898
שאלה 13
עבור כל אחד מהמאפיינים:
-
מבחינת השגיאה במצב מתמיד, אנו יכולים לראות שככל ש-
כלומר, ככל שההגבר הסטטי של
הערה של גל:
יאפ יופי
-
מבחינת ה-settling time, אנו רואים שככל ש-
הערה של גל:
רוחב סרט גדול לא בהכרח מגדיל את זמן ההתכנסות, למעשה זה אינדיקטור לכך שהמערכת מגיבה מהר. במקרה הזה בגלל שיש תנודות יהיה לכן זמן עליה קצר וזמן רגיעה ארוך.
-
מבחינת ה-overshoot, אנו רואים שככל ש-
הערה של גל:
אני לא חושב שראיתם את זה בדיוק, יותר קל להסביר את כל מה שפה ממג”ש וזהו.
-
מבחינת ה-rise time, ניתן לראות שככל ש-
-
מבחינת המתח המקסימלי, אנו מקבלים שככל ש-
שאלה 14
באופן איכותי, אנו רואים מהמדידות שעבור
הערה של גל:
איך זה מאשש אנליזה של המג”ש?
נציב ערכים ונקבל:
בנוסף, בשתי המדידות קיבלנו מערכות יציבות, שכפי שראינו בשאלה 11, זה הגיוני, כי
שאלה 15
קיבלנו שגיאה במצב מתמיד בעיקר בגלל הפרעות, שגיאות מדידה, ואי-דיוקים בפרמטרי המערכת - העובדה שאנו עובדים עם בקר פרופורציוני לא כל כך עוזרת. למשל, כפי שהוסבר בשאלה 13 על הפרעת מדרגה, אנו נקבל שגיאה לא אפסית במצב מתמיד כתלות בהגבר הסטטי על הבקר. שגיאות ואי דיוקים אחרים עלולים להחמיר עוד יותר את בעיה זו.
שאלה 16
בניסוי קיבלנו
נציב נתונים, ונקבל שעבור
אנו רוצים לעבוד ביחידות של מעלות, ולכן:
כלומר, כדי לקבל את הריסון הדרוש, בפועל היינו צריכים הגבר יותר גבוה מאשר בתאוריה כי יש שגיאות במידול התהליך (הזנחנו השראות, חיכוך לא לינארי וכ’ו) בנוסף להפרעות ושגיאות מדידה.
תגובות זווית ומתח בפועל ותאורטיות לקבלת
.
הערה של גל:
הכל נכון אבל לזה יש תשובה הרבה יותר פשוטה. בניסוי היה לכן מפצה מקדים ובאנליזה פה אין לכן, המפצה המקדים מסייע לרסן את התגובה לכן אפשר להגדיל את ההגבר.
2.3 בקר PI
שאלה 17
מהפרויקטון:
עבור הבקר
יש לנו אפס אחד ב-
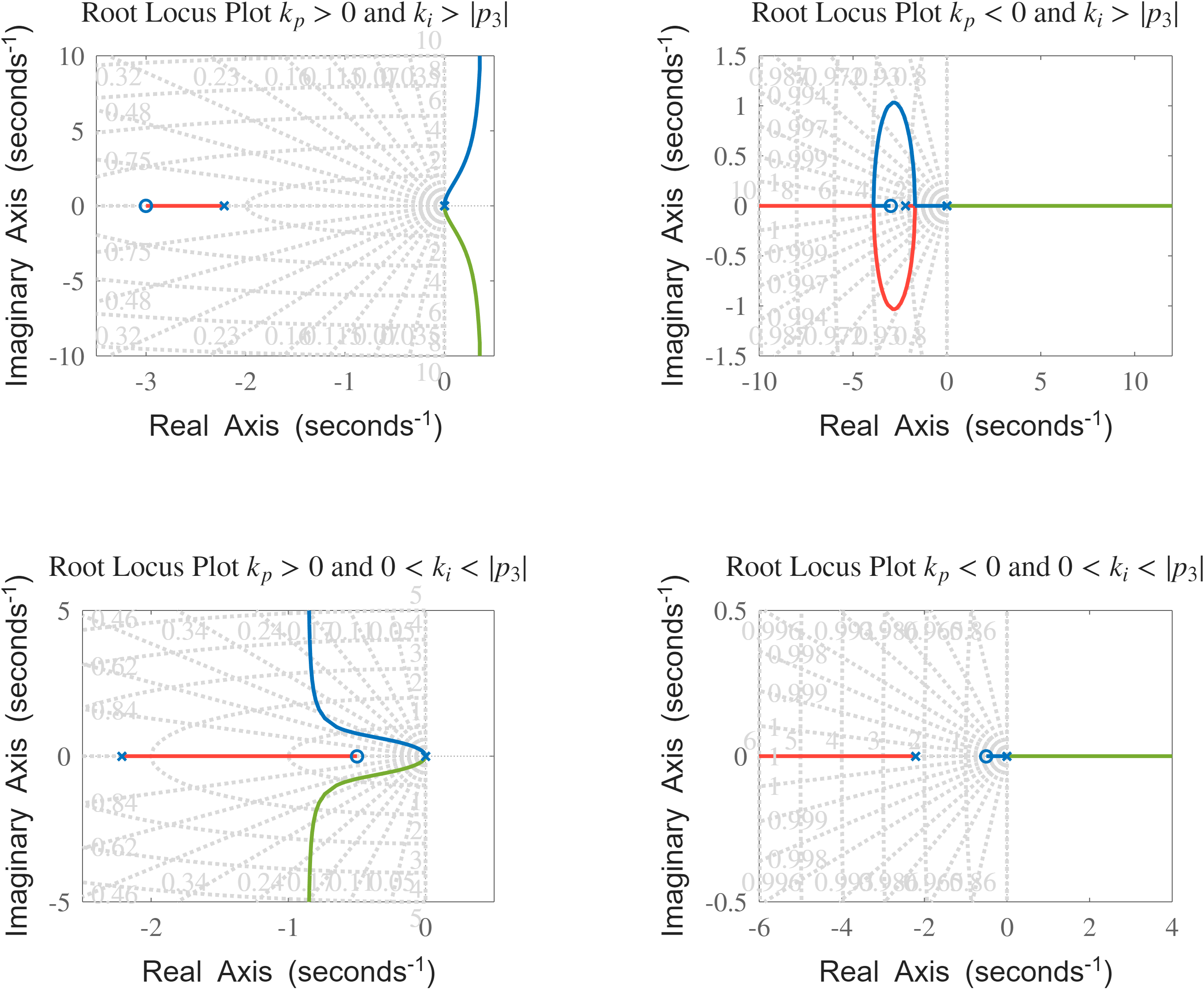
דיאגרמת מג”ש עבור ערכי
ו- שונים.
אנו לא בחנו את
גם לא בחנו את
שזה זהה למקרה של הבקר P.
קיבלנו שהמערכת תהיה יציבה רק אם:
נציב נתונים:
שאלה 18
עבור
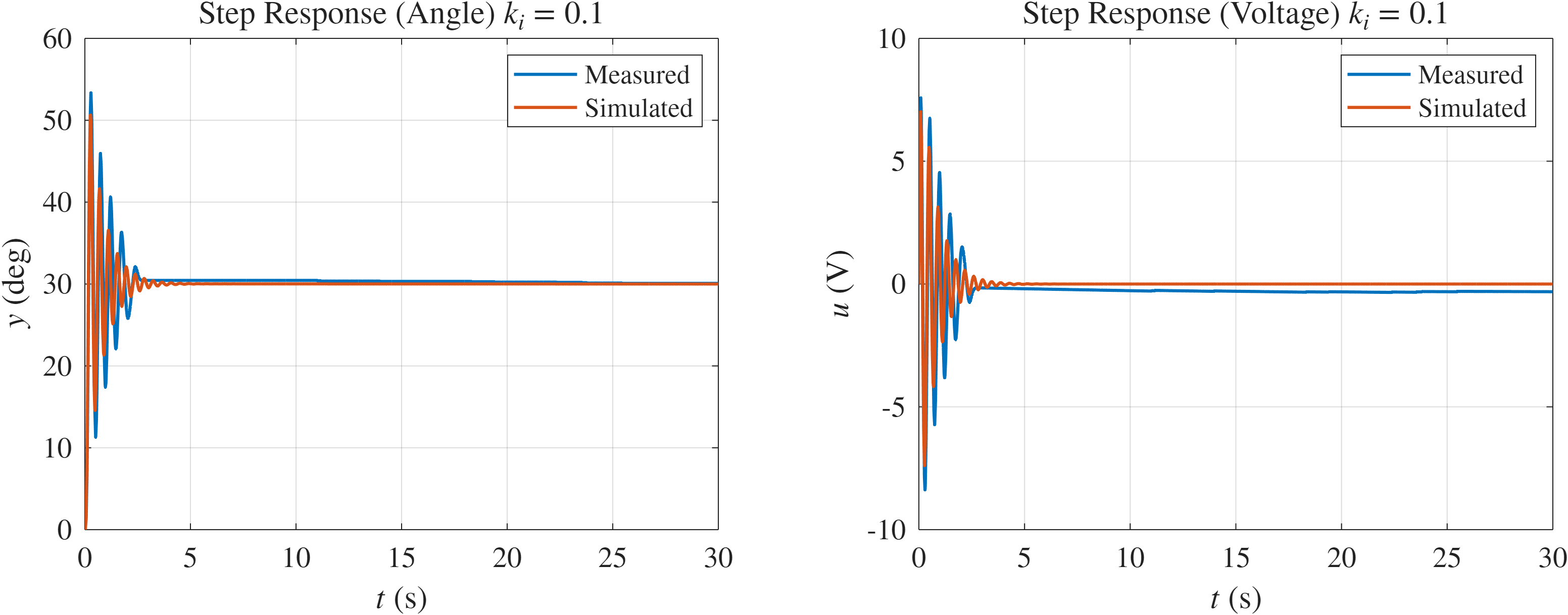
תגובת הזווית והמתח לכניסת מדרגה
עם 𝟙 .
Performance Metrics for k_i = 0.1:
Steady-State Error: 0.04
Settling Time: 2.598
Overshoot: 77.6298%
Rise Time: 0.091912
Max Input Voltage: 7.5842
הערה של גל:
מה הזמן למצב מתמיד?
עבור
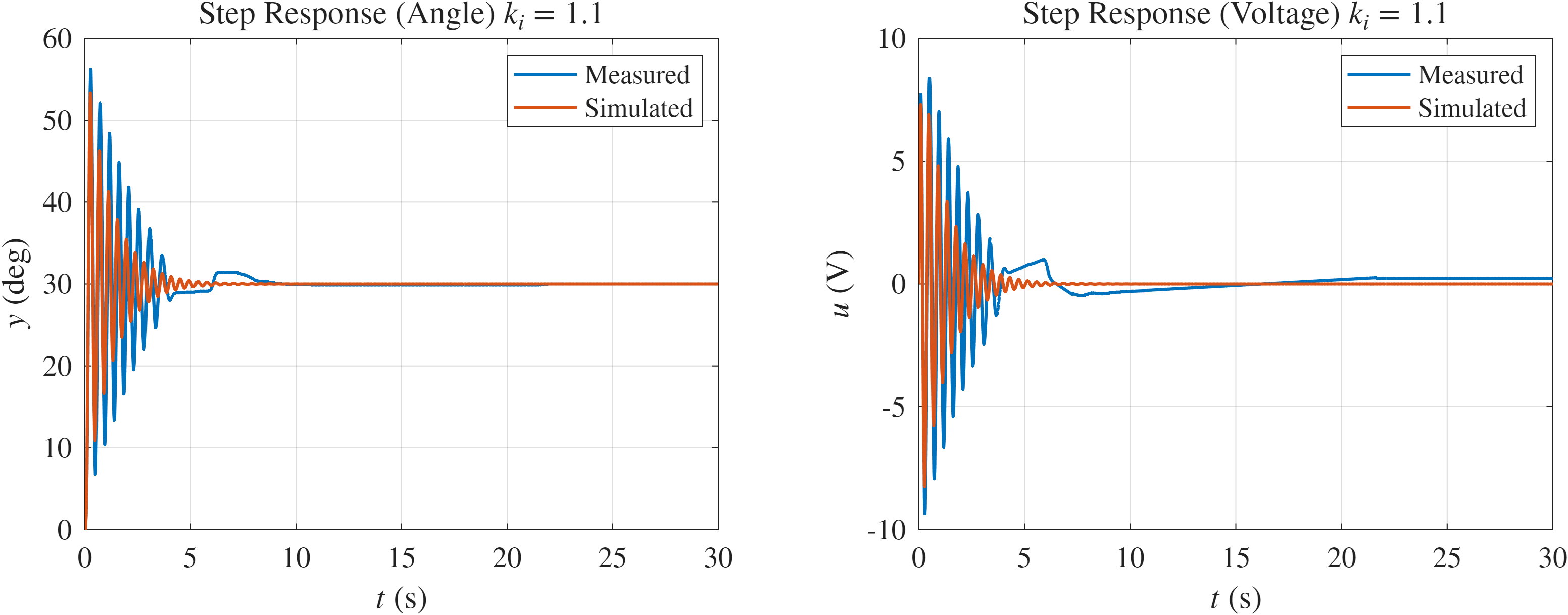
תגובת הזווית והמתח לכניסת מדרגה
עם 𝟙 .
Performance Metrics for k_i = 1.1:
Steady-State Error: 0.04
Settling Time: 7.941
Overshoot: 87.217%
Rise Time: 0.089178
Max Input Voltage: 8.3839
הערה של גל:
למה בחרתם דווקא את הניסוי הזה? M2 בקבצים שלכם מגיע לאפס שגיאה ואין לו את הבאמפ הזה באמצע.
שאלה 19
עבור כל אחד מהמאפיינים:
- מבחינת השגיאה במצב מתמיד, אנו יכולים לראות שאין הבדל משמעותי בין ערכי
- מבחינת ה-settling time, אנו רואים שככל ש-
הערה של גל:
אני ממש לא בטוח שראיתם את זה, וגם אם כן פה זה ממש זניח.
- מבחינת ה-overshoot, אנו רואים שככל ש-
[!abstract] הערה של גל:
אבל - מבחינת ה-rise time, ניתן לראות שככל ש-
- מבחינת המתח המקסימלי, אנו מקבלים שככל ש-
- מבחינת ה-overshoot, אנו רואים שככל ש-
הערה של גל:
יש פה כמה דברים שהם לא ממש נכונים.
שאלה 20
כפי שהוסבר בשאלה 13 ושאלה 19, השגיאה במצב מתמיד באמת שואפת כעת לאפס. בבקר P, היה לנו
שאלה 21
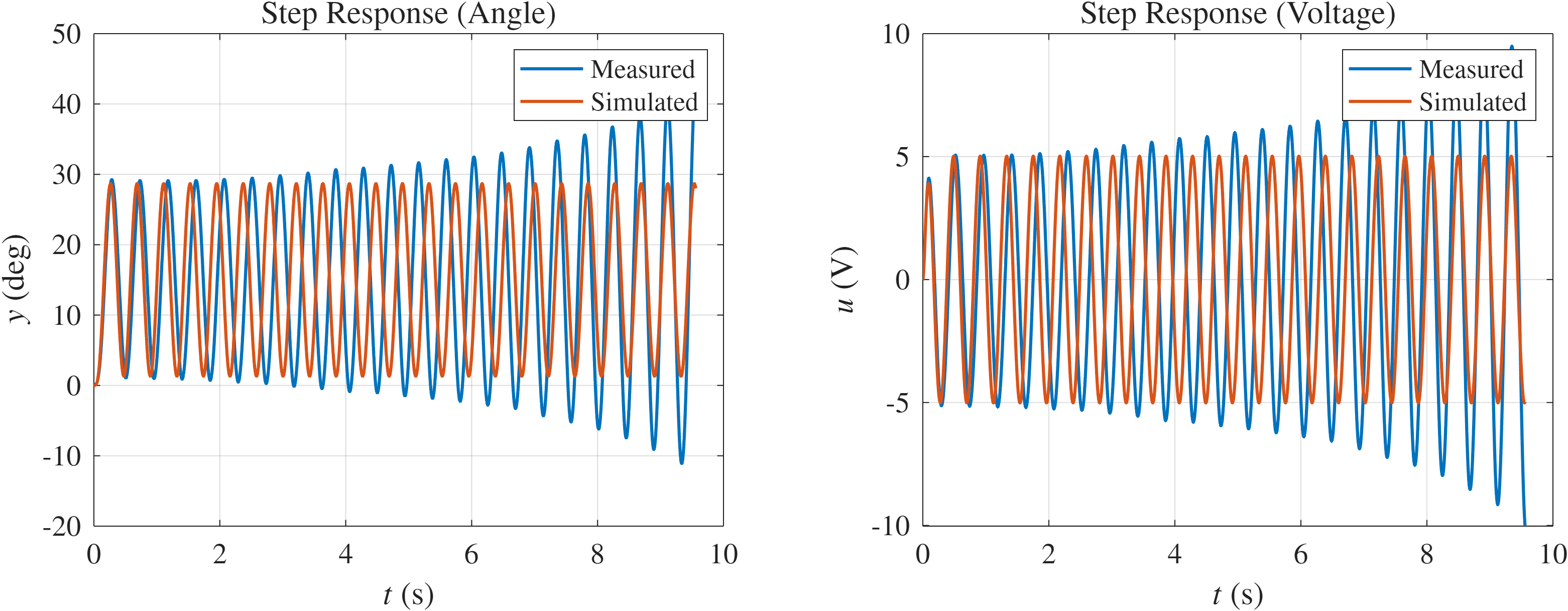
תגובה בפועל ובתאוריה של המערכת עבור ערך קריטי של
לסף יציבות.
בניסוי קיבלנו שהמערכת מתבדרת עבור
בגרף לעיל ניתן לראות כי התגובה התיאורטית באמת על סף יציבות.
מבחינת התגובה המדודה, מאחר וקשה מאוד למצוא את הסף במציאות, הסתפקנו בלמצוא תגובה המתבדרת לאט, ולכן קיבלנו תוצאה שונה (מעט) מהתגובה התאורטית.
שאלה 22
כפי שראינו בשאלה 18, במערכת היציבה, אחד הקטבים של החוג הפתוח הוא
הערה:
יפה.