Introduction
Linear voltage versus current laws for resistors, force versus displacement laws for springs, force versus velocity laws for friction, etc., are only approximations to more complex nonlinear relationships.
Since linear systems are the exception rather than the rule, a more reasonable class of systems to study appear to be those defined by nonlinear differential equations of the form:
It turns out that
- one can establish properties of nonlinear DE’s (differential equations) by analyzing state-space linear systems that approximate it.
- one can design feedback controllers for nonlinear DE’s by reducing the problem to one of designing controllers for state-space linear systems.
Local Linearization Around an Equilibrium Point
Definition:
A pair
is called an equilibrium point of if
.
In this case
is a solution to the (5.1).
Suppose now that we apply to (5.1) an input
that is close but not equal to
is close but not quite equal to
and use (5.1) to conclude that
Expanding
where the partial derivatives are actually the Jacobian of the corresponding vector:
To determine the evolution of
and also expand
By dropping all but the first-order terms, we obtain a local linearization of (5.1) around an equilibrium point.
Definition:
The LTI system
defined by the following Jacobian matrices
is called the local linearization of
around equilibrium point
.
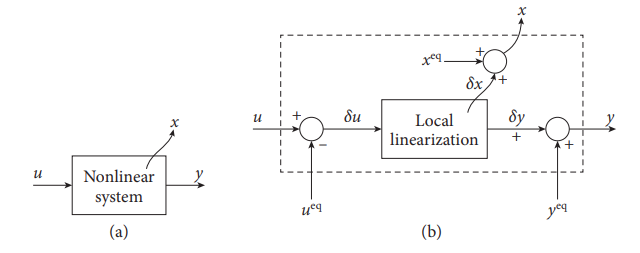
Nonlinear system (a) and its local approximation (b) obtained from a local linearization.
Example:
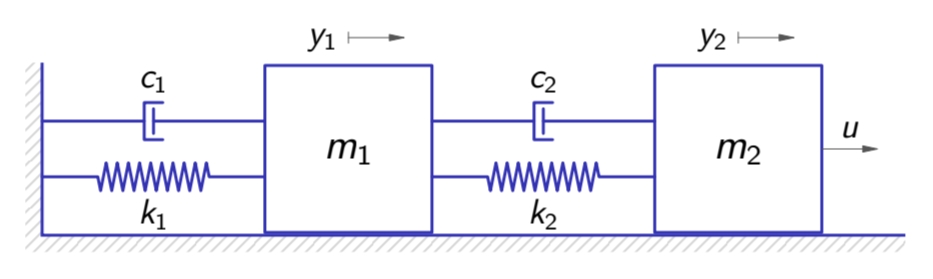
The following mass-spring-damper system
Screenshot_20240705_134757_Samsung Notesss)assuming zero spring and damper forces
and . Define
we get:
Reorganizing, we get:
Knowing that
and , we can now write in the matrix form: Also, not forgetting
In a nonlinear state-space representation (5.1), we can see that:
To linearize the system, we first need to find equilibrium points - points
that sastisfy . Solving, we get 2 equations in 3 variables, hence for every
.
Derivatives (Jacobians):Defining
the linearization of the system is given by
Because the derivatives (Jacobians) are all independent of
and , the higher derivatives are zero, and the first-order Taylor expansion is accurate. Hence, the linearization of the system is an accurate linear decsription of the mass-spring-damper system.
Exercises
Question 1
Consider the system shown in the following figure:
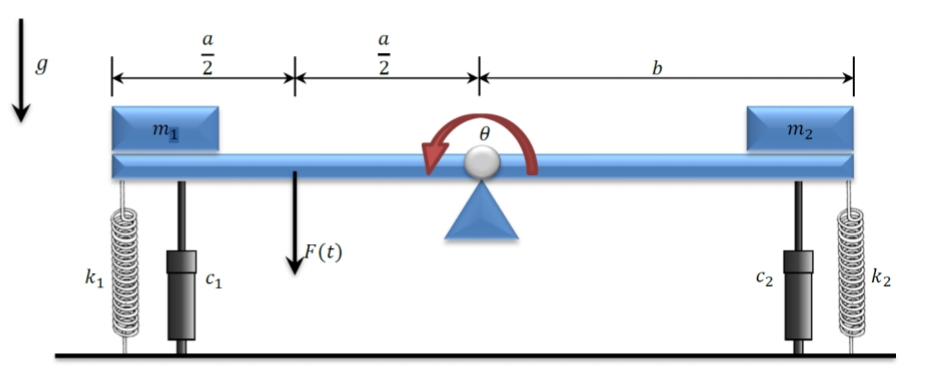
Seesaw system
We will take the following parameters:
Assuming that the spring and dampers only elongate vertically, it can be shown that the dynamics are given by the following second order differential equation:
Part a
Rewrite the dynamics in the following form:
with
Solution:
Substituting
In matrix form:
Not forgetting:
Therefore, we get:
Part b
Find
Solution:
Zeroing
Substituting
We want to find
Part c
Linearize the system around this equilibrium point.
Solution:
Derivatives:
Substituting the equilibrium point, and
we get:
Question 2
Consider the tank system shown in the following figure:
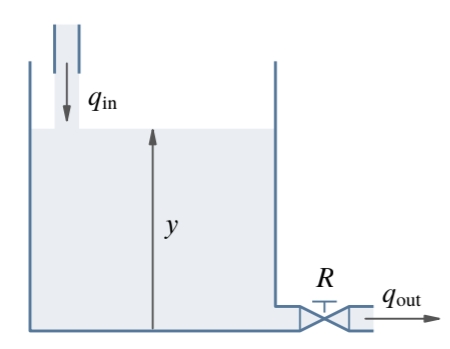
Tank system
The state of the system is given by the height of the liquid level
with
Part a
Rewrite the dynamics in the following form
with
Solution:
Substituting
Therefore:
Part b
Find all the equilibrium points
Solution:
Zeroing
Hence, all the equilibrium points are given by
where the condition
Part c
Linearize the system around the equilibrium point corresponding to
Solution:
The equilibrium point in this case:
Derivatives:
Substituting the equilibrium point, and
we get:
Part d
Find the transfer function of the linearized system.
Solution:
According to state space to transfer function:
In our case:
Question 3
Consider the following magentic lebitation system shown in:
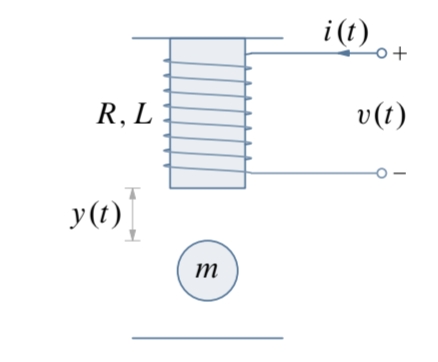
Magnetic levitation system
The current
where
The dynamics of the electric RL circuit are:
Part a
Rewrite the dynamics in the form
with
Solution:
The dynamics of the ball must satisfy Newton’s second law:
The dynamics of the RL circuit must also satisfy:
substituting
In matrix form:
Therefore:
Part b
Find the equilibrium points of the system.
Solution:
The equilibrium points are given by
from
from
We also note that
Substituting
Part c
Linearize the system around the equilibrium points.
Solution:
Derivatives:
Substituting the equilibrium point, and
we get: