| סטודנט א’ | סטודנט ב’ | |
|---|---|---|
| שם | עידו פנג בנטוב | יובל הנדל |
| ת”ז | CLASSIFIED | CLASSIFIED |
| דואר אלקטרוני | CLASSIFIED | CLASSIFIED |
הקוד נמצא בGitHub.
הערה:
ציון:
חלק א’
שאלה 1

שרטוט המערכת.
ניתן להגדיר את כלל המערכת בעזרת קואורדינטה מוכללת אחת
כאשר
לכן ממשוואות אויילר-לגראנז’, כאשר נשים לב שהכוח המוכלל כתוצאה מהריסון הוא
נסמן את הכוח המופעל ע”י הקפיצים ע”י:
נסמן את האיבר הלא לינארי של הכוח ב-
כאשר:
נפתח את
נציב בחזרה בכוח הקפיצים:
לפי ההנחיות, נזניח את הפרמטרים ממעלה שלישית ומעלה. נישאר עם:
נציב בחזרה במשוואת התנועה (1.1):
שאלה 2
עם נרמול הזמן
נציב את שאר הנרמולים:
ננרמל את
כאשר:
עם
שאלה 3
נבצע טרנספורמציה של הקואורדינטות לפי
נציב ב-(2.1):
נסדר:
נסמן
כאשר נשים לב ש-
ולכן:
קיבלנו בדיוק את אותן המשוואות מהתרגול.
- עבור
הפתרון של מערכת כזאת הוא פתרון ידוע: - עבור
הפתרון:
ראשית, נפרוש את מרחב הפתרונות בעזרת מתן שני תנאי התחלה בת”ל:
כעת נתפור את הפתרון עבור כל זמן
נקבל את מערכת המשוואות:
נציב את
ניתן לכתוב בצורה מטריצית:
נפתור עבור
באותו אופן עבור
הפתרון שמתקבל יהיה סופרפוזיציה של
בהרצאה, ראינו שעבור
אם נביא זאת למונחים של
נרצה לדעת עבור איזה
או פשוט:
ניתן להראות מהפולינום האופייני של הבעיה שהערכים העצמיים מקיימים:
כאשר:
ו-
לכן, כדי למצוא את גבולות האי יציבות, עלינו למצוא את העקומות המקיימות:
נציב את הגדרת
מהצבת הפתרונות שקיבלנו נקבל:
לאחר ההצבה נקבל ביטוי לשני עקומים:
נשים לב ש:
בנוסף, כיוון ש-
קיבלנו שני עקומים במונחים של
שאלה 4
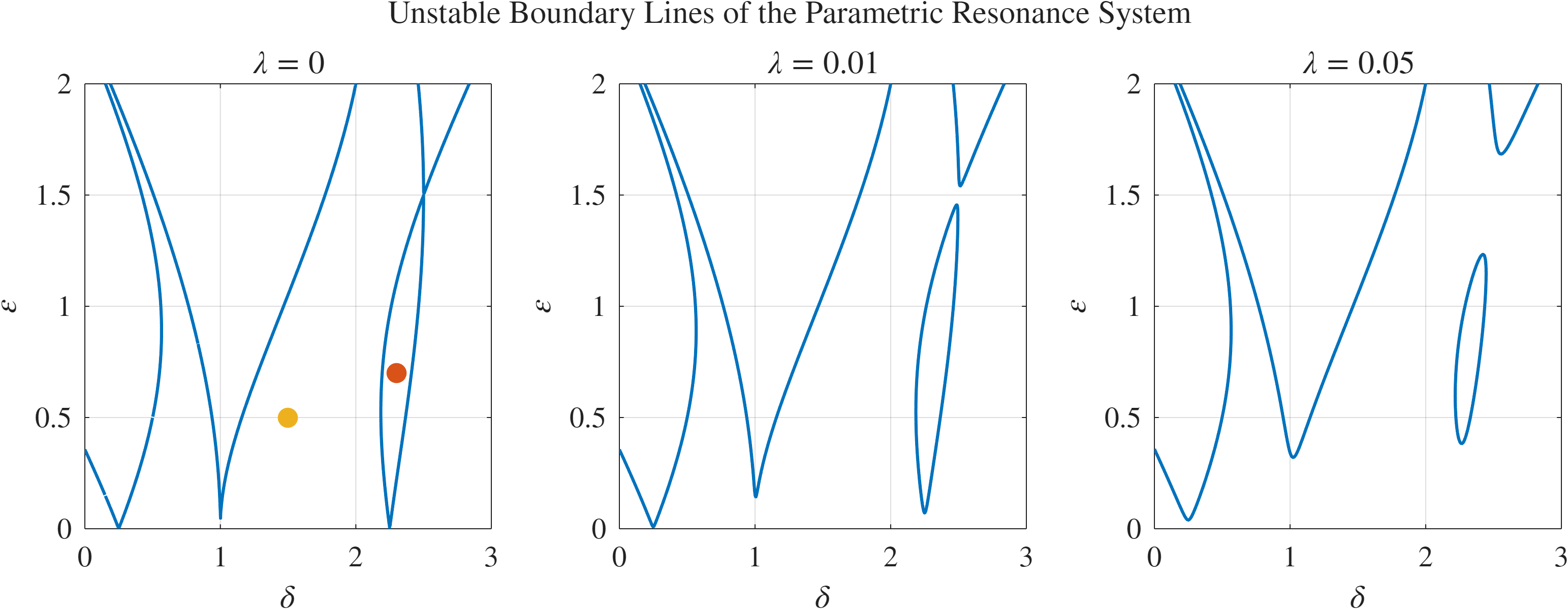
איור 1: דיאגרמת Strutt של הבעיה הנתונה.
נשים לב שעבור ריסון אפסי,
שאלה 5
נחזור ל-(2.1):
ונזכור גם את (2.2):
עם
נקבל:
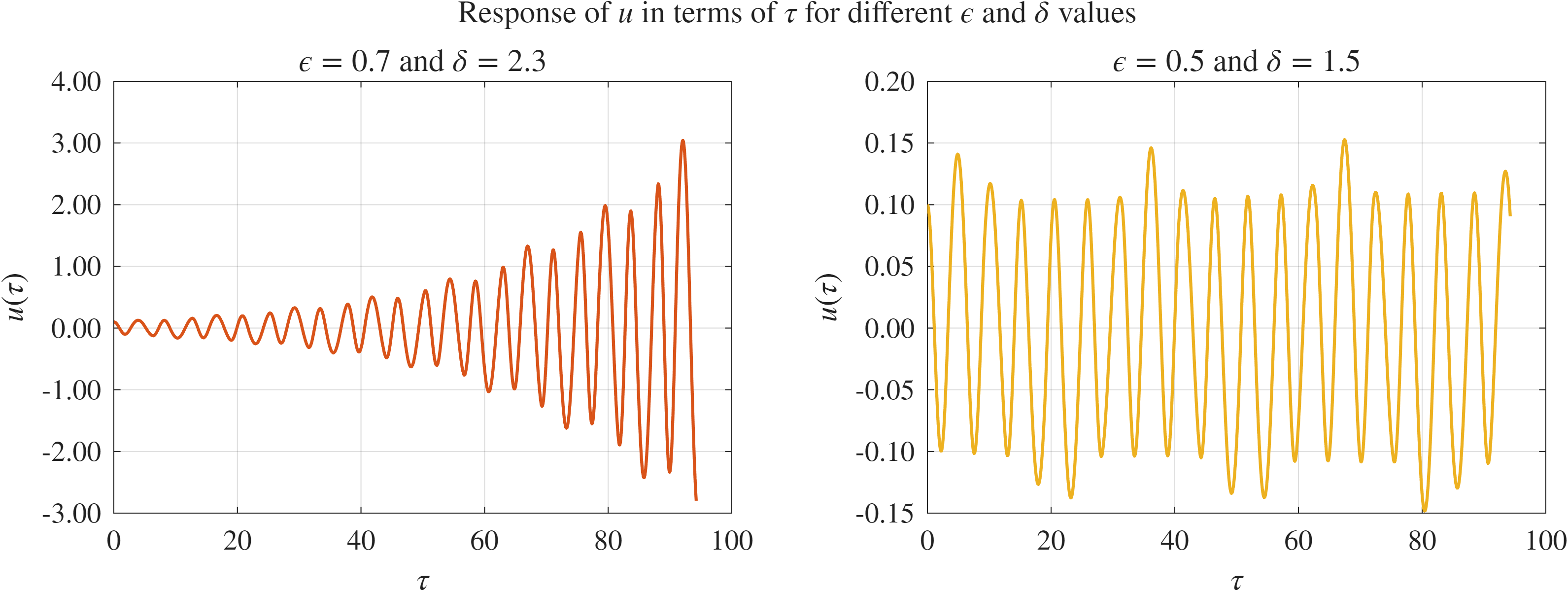
איור 2: תגובה נומרית מחוץ ובתוך הלשוניות.
חלק ב’

איור 3: סכמת הבעיה.
שאלה 1
ניתן לתאר את דינמיקת המערכת עם
שאלה 2
קצת גאומטרייה:

איור 4: גאומטריית המטוטלות.
נשים לב כי:
לכן נקבל שהגודל הוא (לאחר זהויות טריגונומטריות):
המיקומים של מסה:
האנרגיה הקינטית היא סכום האנרגיה הקינטית של כל חלקיק בר מסה במערכת:
מבחינת אנרגיה פוטנציאלית, יש לנו את אנרגיית הקפיץ והאנרגיה הפוטנציאלית הכבידתית (עם נקודת ייחוס בראשית):
נתון גם כי פונקציית ריילי של המערכת:
שאלה 3
הלגראנז’יאן במקרה שלנו, מתוך משוואות (2.2) ו-(2.3):
נשים לב כי:
כדי לחשב את
כעת נוכל לחשב את
נתייחס לכוחות המוכללים:
מאחר ונתונה לנו פונקציית דיסיפציה של ריילי, יופיע לנו גם בצד הימני של משוואות התנועה:
נציב במשוואות אויילר-לגראנז’:
אם נציב גם את
שאלה 4
נבצע את הנרמול על משוואת התנועה עבור
ננרמל גם את הזמן לפי
נציב גם את הנרמולים האחרים ונישאר עם:
עבור הקואורדינטה השנייה,
שאלה 5
במקרה שבו אין ריסון, משוואות התנועה שלנו הן:
ניתן להבין מהאיור שאחת מנקודות שיווי המשקל היציבות היא:
נבצע לינאריזציה סביבה, כאשר נשים לב שבמקרה המיוחד הנ”ל,
נגזור את
לכן משוואות התנועה לאחר לינאריזציה:
נוח לנו לעבוד עם הצורה הבאה למערכות בשתי דרגות חופש:
לכן, במקרה שלנו:
שאלה 6
על מנת למצוא תדרים עצמיים נפתור בעיית ערכים עצמיים מוכללת של הצמד
ונדרוש פתרון לא טריוויאלי.
נקבל ב-MATLAB שהתדרים העצמיים:
וקטורים מודליים (לא מנורמלים):
נסמן:
כך שנוכל לרשום:
שאלה 7
ניעזר בתכונות האורתוגונליות של המודים:
נמצא כי:
וקטור מודלי
כאשר
מה שאומר ש:
כלומר, כל מוד מחלקים ב-
שאלה 8
נשים לב ש:
וגם:
כעת, בעזרת המטריצה המודלית אנו יכולים לבצע מעבר בסיס למשוואות התנועה כדי לקבל משוואות תנועה שהן לא מצומדות. אנו עושים זאת בעזרת קואורדינטות מודליות טבעיות
כלומר, אנו מתארים את הקואורדינטות המוכללות כקומבינציה לינארית של עמודות
נכפיל ב-
נישאר עם:
קיבלנו 2 משוואות לא מצומדות. אם אין כוחות חיצוניים:
הערה של הבודק:
יש תוצאות אבל חסרים הסברים.
שאלה 9
נניח כעת ש:
כאשר נציב בחזרה בתדירויות הטבעיות נקבל את הביטויים הפשוטים הבאים:
וגם:
כך שלפי (7.1):
נשים לב גם ש:
בהינתן תנאי התחלה ללא מהירות:
נמיר לתנאי התחלה במובנים של הקואורדינטות המודליות
נזכור ש-
נחזור למשוואות התנועה הלא מצומדות שקיבלנו בשאלה קודמת:
נזכור שעבור עירור חופשי תגובת המערכת הרמונית, ולכן נוכל להניח פתרון מהצורה:
נמיר בחזרה לקואורדינטות פיזיקליות:
כמשוואות:
נציב את
מצאנו כבר את
נציב את
נסמן:
כדי שיתקיים משטר פעימות, נרצה לראות מתי יתקיים:
כך שבמוד הטבעי הראשון שתי המטוטלות נעות כמטוטלת אחת. לעומת זאת, עבור המוד השני, המטוטלות נמצאות בהפרש פאזה של
נציב:
נמיר בחזרה לפרמטרי המערכת. נשים לב ש:
לכן, עם התנאים שרשמנו:
או פשוט:
כלומר, גם המסות וגם מרחקי הקפיץ מציר המטוטלות צריכים להיות זהים בכל מטוטלת.
שאלה 10
כפי שראינו בשאלה קודמת:
נוכל שרירותית לבחור
אם ניקח למשל את תנאי ההתחלה:
ונציב ב-(0.1):
בעזרת זהויות טריגונומטריות נקבל:
נסמן:
כאשר
בהנחה ואמפליטודת המעטפת של שתי המטוטלות משתנה באופן איטי ביחס לתנודות המהירות של המטוטלות, נוכל לרשום:
עם הנחה זאת, יתקיים:
לכן, במקרה הספציפי הזה, עם תנאי ההתחלה האלו, וקבוע קפיץ חלש זה, נוכל להתייחס לפונקציות
שאלה 11
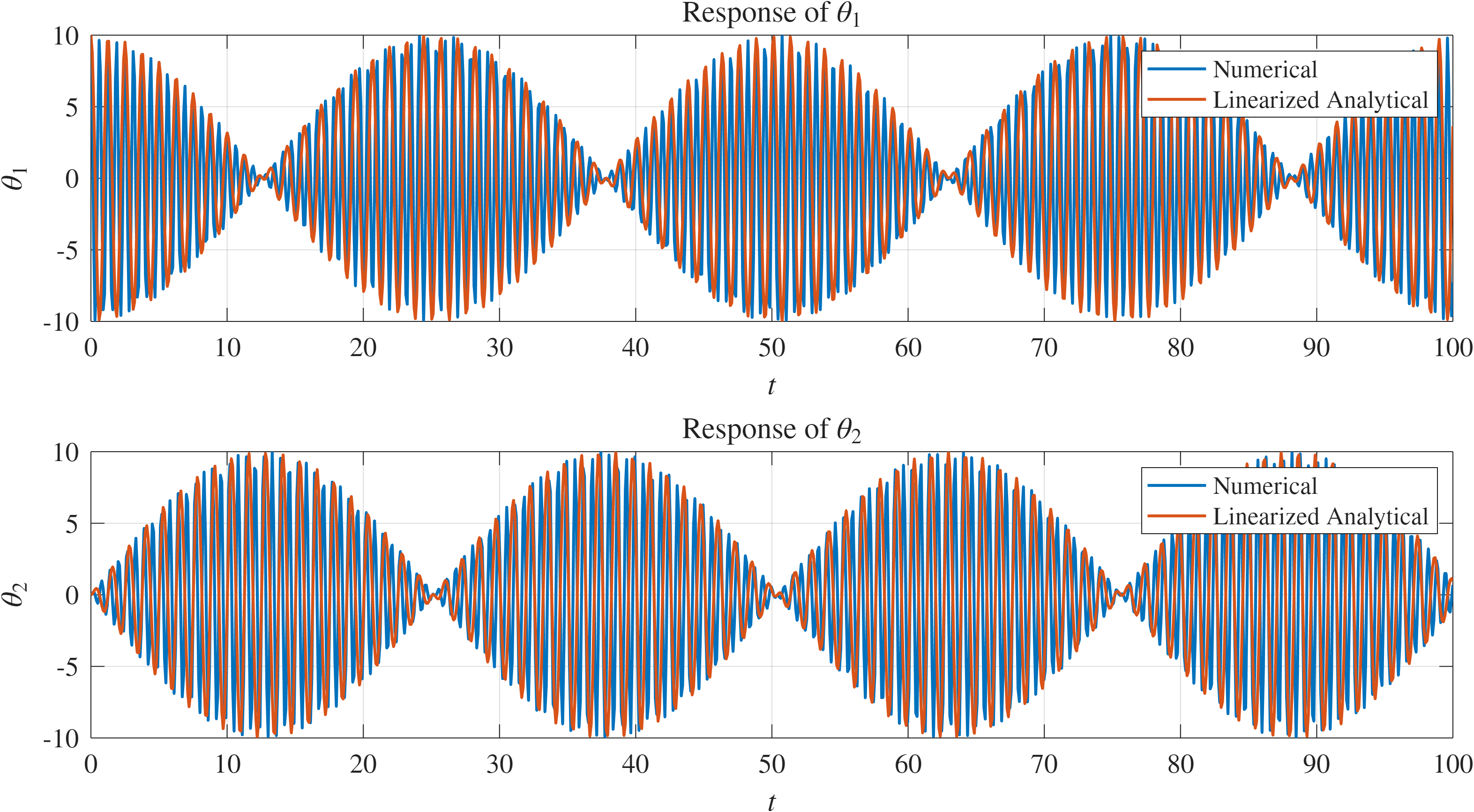
איור 5: תגובת המערכת בחישוב נומרי ואנליטי לאחר לינאריזציה.
שאלה 12
משוואות התנועה בקואורדינטות מודליות הן:
כאשר
עבור תנאי התחלה כללי, אנו יודעים שבמצב מתמיד הפתרון הוא מהצורה:
נציב במשוואות התנועה המודליות ונקבל (לאחר חילוק ב-
כאשר
נעביר אגף:
נעבור לקואורדינטות פיזיקליות. כיוון ש-
היפוך של מטריצה אלכסונית הוא פשוט
עלינו רק למצוא מהם
נשים לב שבמערכת המקורית (שאלה 4), מאחר וכעת יש ריסון, מטריצת הריסון היא:
נניח כי
נוכל ממנה לחשב את מטריצת הריסון המודלית
מאחר והצורה הסטנדרטית של
נסיק כי:
מצאנו את כל הביטויים עבור (2.1), ולכן אנו יודעים לנסח את תגובת המערכת במצב מתמיד:
שאלה 13
נשים לב שעם התנאים הנתונים, אנו מקבלים את אותם הערכים משאלה 9, רק הפעם נוכל כבר להציב ערכים כדי לפשט את הבעיה. בנוסף, נניח ש-
ואז המטריצה המודלית:
נניח כי הריסון הנתון הוא ריסון מודלי, כך ש:
לכן, לפי (2.2) ו-(2.1), התגובה במצב מתמיד (רק האמפליטודה) היא:
נוכל כעת לפתח את תגובת התדירות באופן גרפי:
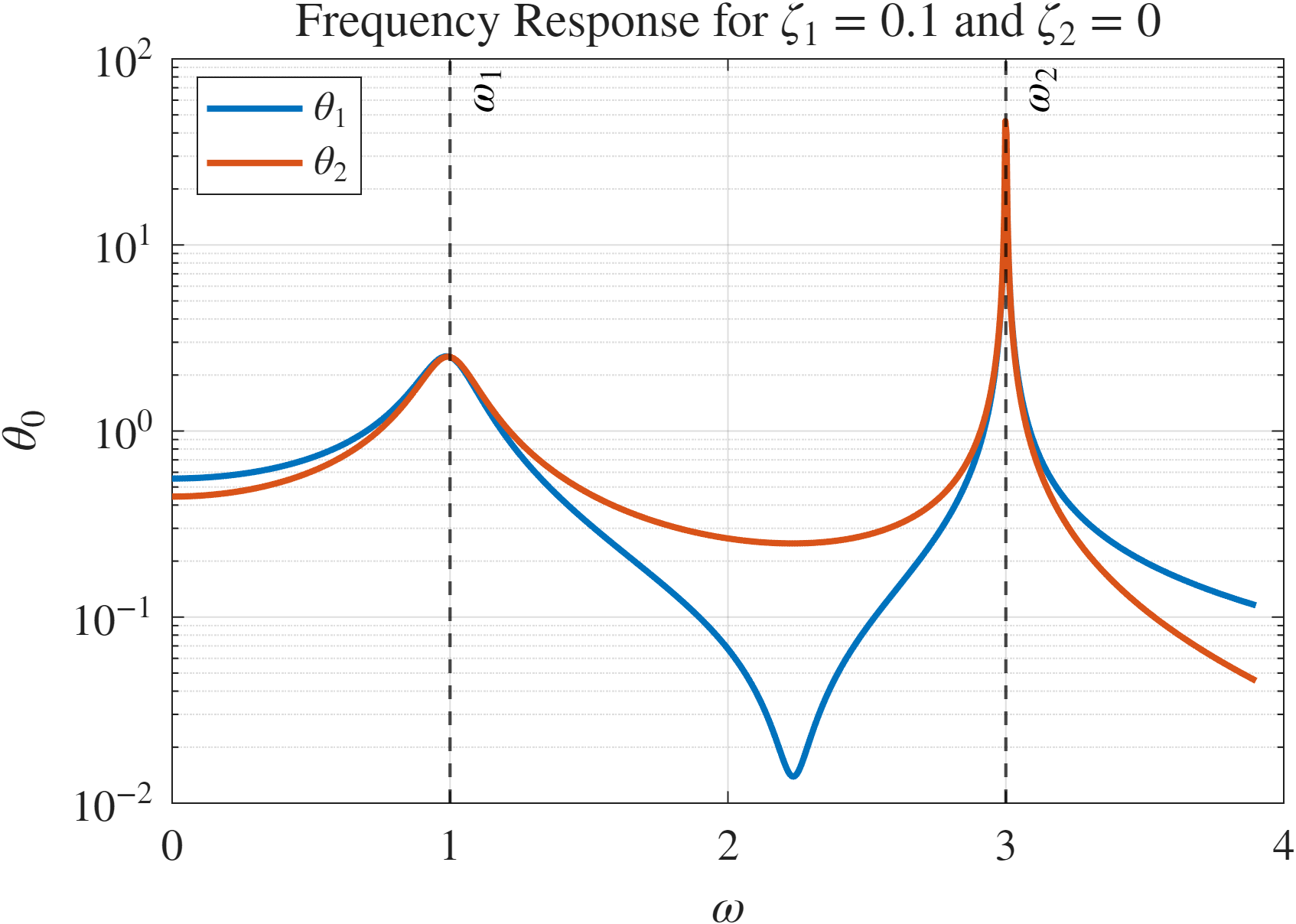
איור 6: תגובת התדירות של המערכת הנתונה.
ניתן לראות שאנו מקבלים אנטי-רזוננס עבור
נתמקד כעת רק ב-
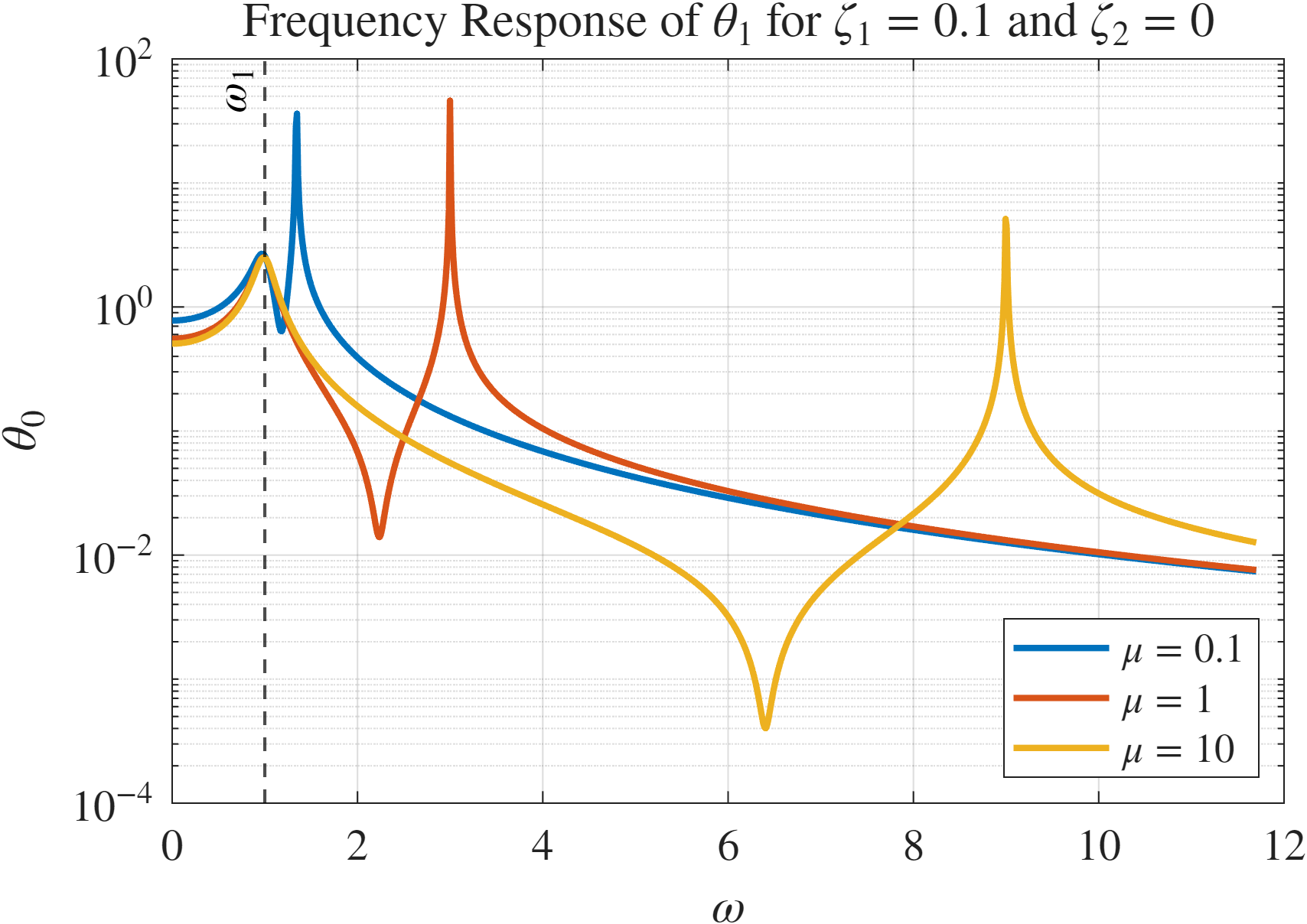
איור 7: תגובת התדירות של
עבור ערכי שונים. זהה בכולם, בעוד תלוי ב- .
נשים לב שבתדירות המוד הראשון,
הערה של הבודק:
חסר הסבר על המודים שהתקבלו.