מבוא
הבן אדם האהוב על יזהר:
בפרק זה נעסוק ברטט פרמטרי במערכות מכניות. המונח פרמטרי בא לתאר מקרים בהם משום מה, העירור החיצוני נכנס למשוואת התנועה של המערכת כפרמטר (למשל קשיחות, מסה, וכו’) של המערכת. זה בשונה לבעיות של רטט מאולץ (forced vibration) בהם האנרגיה מוכנסת למערכת, והמערכת מגיבה, או לא, כתוצאה מהתהודה (resonance) שלה, אם היא בכלל קיימת. בבעיות רטט מאולץ הפרמטרים של המערכת לא משתנים כתוצאה מהכוחות המופעלים עליהם. מנגד, מערכת מעוררת פרמטרית תראה שינויים בפרמטר, למשל בקבוע הקפיץ.
מספר בעיות פרמטריות מופיעות באיור הבא:
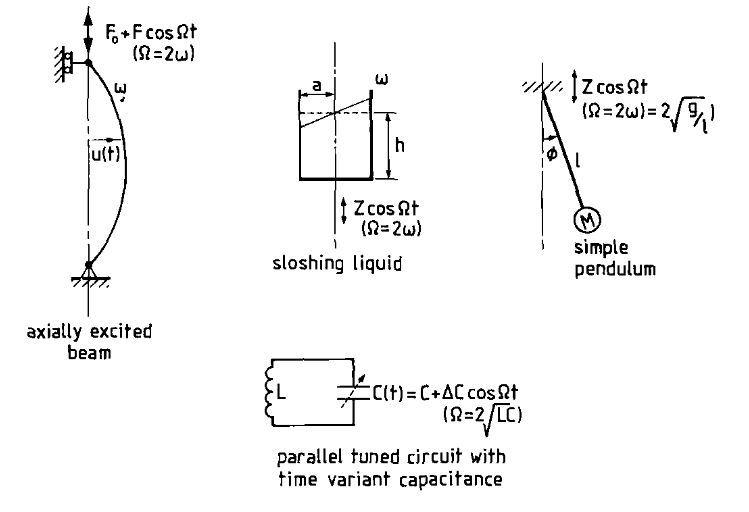
דוגמאות של מערכות פיזיקליות הנתונות לרטט פרמטרי. (Cartmell, 1990).
נביט בבעיה הבא:
דוגמה:
נרשום את משוואות התנועה של המערכת. הלגראנז’יאן:נקבל ממשוואות אויילר-לגראנז’:
נתייחס לתגובת המערכת באמפליטודות קטנות (
), ונקבל משוואות אוסילטור לינארי עם מקדם קשיחות שמשתנה בזמן באופן מחזורי:

נביט גם בבעיה הבאה:
דוגמה:
משוואות התנועה של החלקיק (ישנם כעת שני כיוונים):כאשר:
נניח תזוזות קטנות סביב הראשית. יותר מכך, נניח שהתזוזות ב-
, כך שכאשר נפתח לטיילור סביב הראשית: עבור המשוואה השנייה, ניתן לרשום בקיצור (אין לי שמץ איך, זה פשוט מה שיולי רשם):
עבור המשוואה הראשונה, נשים לב שהפתרון הוא פשוט
. נציב במשוואת התנועה בכיוון ונקבל:

בשתי הדוגמאות לעיל ראינו אוסילטור לינארי עם עירור פרמטרי הרמוני, והשם הכללי לאוסילטורים כאלה הוא אוסילטור פרמטרי, ומשוואות התנועה שלהם לאחר לינאריזציה נקראת משוואת מתייה (Mathieu):
גרסה יותר כללית של משוואה זו עבור פונקציית עירור שהיא מחזורית, אבל לא בהכרח הרמונית, נקראת משוואת היל (Hill):
התנועה כתוצאה מעירור פרמטרי היא לא יציבה, וגודלת, אקספוננציאלית, עם הזמן. העוצמה הסופית של התגובה לא מושפעת באופן ישיר ע”י הריסון הפועל על המערכת, אלא ע”י השפעות של תזוזות קיצוניות כמו למשל קשיחות לא לינארית (
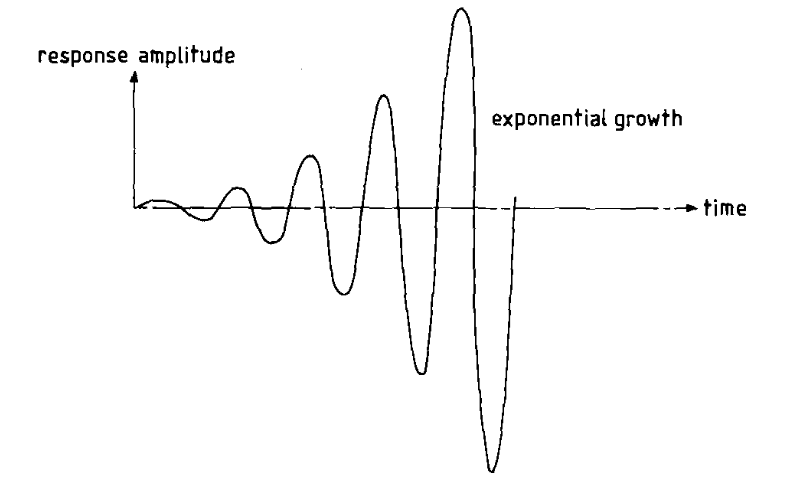
גדילת תגובה פרמטרית עם הזמן עבור קוֹרַת שְׁלוּחָה. (Cartmell, 1990).
נחזור למשוואת מתייה (5.1). נבצע נרמול שלה:
כאשר
ונקבל את המשוואה החסרת ממד:
נשווה לבעיה של אוסילטור לינארי הנתון לעירור מחזורי חיצוני:
באוסילטור הלינארי הנתון לעירור מחזור חיצוני, שבו התגובה מתבדרת לאינסוף רק במקרה שבו מתקיים היחס המדויק של
יציבות - מבוא לתורת פלוקה
היציבות של משוואות מתייה והיל התחילה להתפתח לקראת סוף המאה ה-20 ע”י פלוקה.
נביט במשוואה לינארית עם מקדם קשיחות שמשתנה באופן מחזורי בזמן:
כאשר
פתרון של מד”ר כזו הוא:
נראה שאם
נגדיר
ולכן
כעת, אם
נרשום בקצרה:
באותו אופן, נוכל גם לרשום את
או בקצרה:
לאחר קצת מניפולציות מאלגברה, נוכל לרשום:
ניתן לבחור את
או, באופן של מערכת משוואות:
מכאן שאם אחד הע”ע מקיים
כיצד נדע מתי
הפתרונות הבלתי תלויים
נציב את תנאי התחלה אלו לתוך משוואות (5.6) ו-(5.7) כדי לקבל:
ולכן:
הפולינום האופייני של מטריצה זו:
לאחר מספר מניפולציות שאין לי כוח לרשום שנוגעות לוורונסקיאן, מגיעים לפולינום האופייני:
נוכל לרשום את הפתרונות כ:
כאשר
מכאן רואים שמתקיים הקשר:
מה שמסווג את היציבות שלנו לשלושה מקרים:
- הע”ע ממשיים, בעלי אותו סימן, וגדלים שונים כך שאחד גדול מ-
- השורשים ממשיים והם
- השורשים הם זוג מספרים מרוכבים צמודים כך ש-
נסיק עבור כל אחד מהמקרים על היציבות ש:
- המערכת לא יציבה, עם תגובה אחת שתגדל אקספוננציאלית, והשנייה תדעך לאפס.
- המערכת על הגבול בין יציבות ואי-יציבות, והתנהגותה תלויה בתנאים החיצוניים.
- המערכת יציבה, גם עם עירורים חיצוניים חזקים.
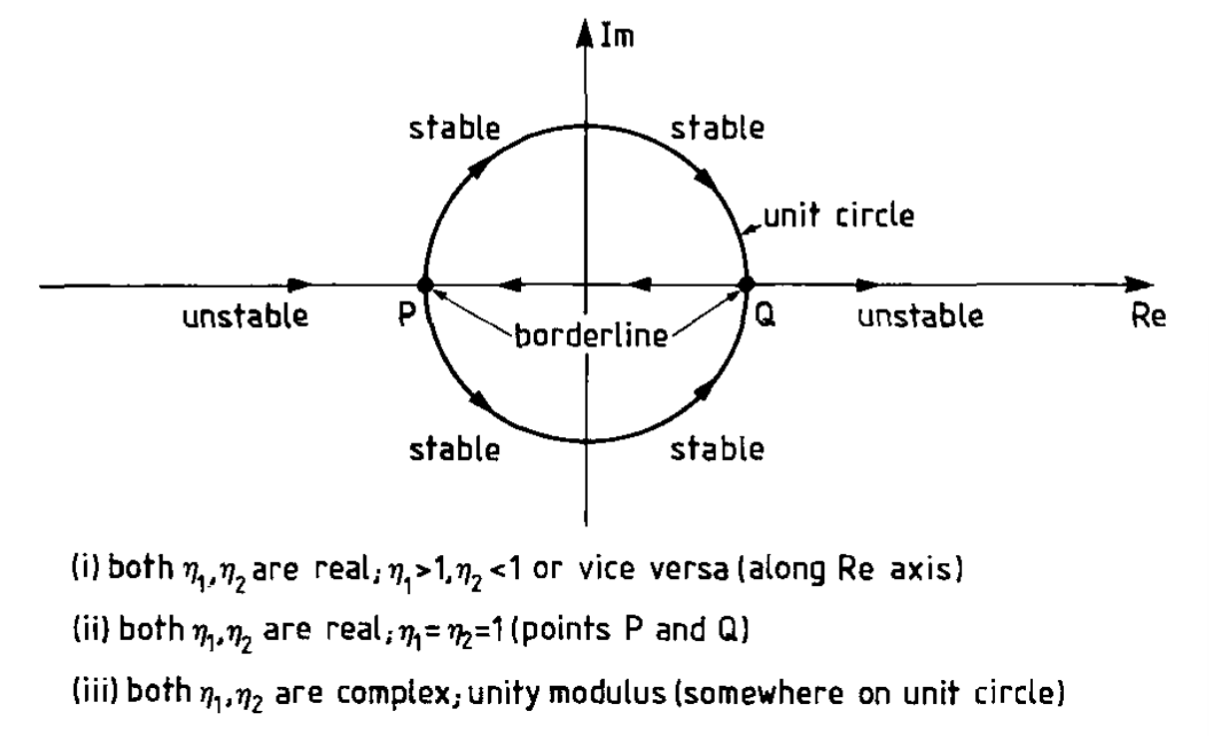
המחשת היציבות של המערכת עבור המקרים השונים.
נסיק שאם ברצוננו לחקור את יציבות המערכת, עלינו למצוא את הגבול בין יציבות ואי-יציבות, כלומר למצוא מתי
תרגילים
תרגיל 1
נתונה המערכת הבאה:
עבור
בצורה גרפית:

פונקציית הקשיחות
.
סעיף א’
פתור את המערכת עבור קשיחות
פתרון:
- עבור
הפתרון של מערכת כזאת הוא פתרון ידוע: - עבור
הפתרון:
סעיף ב’
נסח את הפתרון המלא בעזרת תפירת הפתרון.
פתרון:
ראשית, נפרוש את מרחב הפתרונות בעזרת מתן שני תנאי התחלה בת”ל:
כעת נתפור את הפתרון עבור כל זמן
נקבל את מערכת המשוואות:
נציב את
ניתן לכתוב בצורה מטריצית:
נפתור עבור
באותו אופן עבור
הפתרון שמתקבל יהיה סופרפוזיציה של
סעיף ג’
מצאו את עקומי המעבר והציגו בדיאגרמת Strut.
פתרון:
כדי למצוא עקומי מעבר בין יציבות לאי עלינו למצוא עקום עבורם:
מהצבת הפתרונות שקיבלנו נקבל:
לאחר ההצבה נקבל ביטוי מפורש ל-
נשים לב ש:
קיבלנו עקומים שתלויים ב-

דיאגרמת Strutt של הבעיה הנתונה.
נקודות בתוך הלשוניות מתארות ערכי

תגובה לתנאי התחלה
בערכי התואמים לנקודות בגרף Strutt לעיל.
הקוד לגרף ב-MATLAB נמצא בGitHub.