צורה חלשה של משוואת האלסטיות
בקירוב אלמנטים סופיים ראינו כבר שהצורה החלשה של משוואת האלסטיות היא:
מיפוי אלמנט משולש לינארי כללי
בדיוק כמו במיפוי אלמנט משולש בבעיית פואסון, מטריצת הקשיחות האלמנטרית תהיה מהצורה:
כאשר האנלוגיות הן
אלמנט המסטר ופונקציות הצורה
גם כאן נבחר אלמנט מסטר משולש במערכת קואורדינטות מקומית
- צומת מקומי 1:
- צומת מקומי 2:
- צומת מקומי 3:

אלמנט מסטר למשולש.
פונקציות הצורה הלינאריות על אלמנט המסטר, המסומנות כ-
לכל פונקציית צורה
מיפוי איזופרמטרי מאלמנט המסטר לאלמנט הפיזיקלי
אלמנט משולש פיזיקלי
המיפוי (טרנספורמציה) מקואורדינטות מקומיות
טרנספורמציה של נגזרות ומטריצת היעקוביאן
בדיוק כמו בבעיית פואסון, במקרה של משולש:
כאשר נוכל לרשום את הטרנספורמציה של הנגזרות באופן מטריצי:
ו-
מטריצת הדפורמציה ומטריצת פונקציות הצורה
באלסטיות דו-ממדית, אנו זקוקים לחישוב
מטריצת פונקציות הצורה
עבור אלמנט משולש עם שלושה צמתים, כל צומת בעל שתי דרגות חופש (תזוזה ב-
וקטור התזוזות הצומתיות הוא:
כך שהתזוזות בתוך האלמנט ניתנות על ידי:
מטריצת הדפורמציה
עבור מצב מישור מאמץ (plane stress) או מישור עיבור (plane strain), וקטור העיבורים מכיל שלושה רכיבים:
מטריצת הדפורמציה
חישוב
כאשר נפעיל את מטריצת הדפורמציה על מטריצת פונקציות הצורה עם הסידור החדש, נקבל:
התוצאה זהה למקרה הקודם מכיוון שסידור הרכיבים במטריצת פונקציות הצורה נשאר עקבי עם סידור וקטור התזוזות.
מטריצות האלמנט המסטר
נוכל לרשום את מטריצת הקשיחות האלמנטרית באופן הבא:
כאשר את
מטריצת הדפורמציה באלמנט המסטר
עבור בעיות דו-ממדיות באלמנט המסטר:
מטריצת פונקציות הצורה באלמנט המסטר
עבור אלמנט משולש עם שלושה צמתים ושתי דרגות חופש לכל צומת:
חישוב
הנגזרות של פונקציות הצורה הלינאריות:
כאשר נפעיל את מטריצת הדפורמציה על מטריצת פונקציות הצורה:
במקרה של אלמנט משולש:
זוהי המטריצה הקבועה שתשמש בחישוב מטריצת הקשיחות האלמנטרית. המטריצה מקשרת בין וקטור התזוזות הצומתיות
מטריצת הקשיחות עבור מישור מאמץ ומישור עיבור
עבור חומר איזוטרופי, מטריצת הקשיחות
מצב מאמצים מישורי (Plane Stress):
מצב עיבורים מישורי (Plane Strain):
כאשר
אינטגרציה נומרית - אינטגרציית גאוס עבור משולשים
עבור חישוב מטריצת הקשיחות האלמנטרית באמצעות אינטגרציית גאוס:
כאשר
במידה ו-
נזכור שלפי גזירה בקואורדינטות הייחוס, את וקטור העומסים נחשב לפי:
אם
חישוב עיבורים ומאמצים (Post-Processing)
לאחר פתרון מערכת המשוואות ומציאת התזוזות הצמתיות, יש לחשב את העיבורים והמאמצים בכל אלמנט.
עבור כל אלמנט, לאחר שמצאנו את וקטור התזוזות הצמתיות
חישוב העיבורים:
השיטה היעילה ביותר לחישוב עיבורים היא לנצל את החישובים שכבר בוצעו עבור מטריצת הקשיחות:
שלב 1: שימוש ביעקוביאן ההפוך שכבר חושב
במקום לחשב מחדש את הנגזרות הפיזיקליות, נשתמש במטריצת היעקוביאן ההפוכה
כאשר
שלב 2: יצירת מטריצת עיבור-תזוזה פיזיקלית
כאשר הנגזרות הפיזיקליות מתקבלות מ-
שלב 3: חישוב העיבורים הפיזיקליים
חישוב המאמצים:
המאמצים מחושבים באמצעות חוק הוק:
עבור מצב מאמצים מישורי:
מיקום החישוב - נקודות גאוס:
כפי שמתואר בpost-processing, העיבורים והמאמצים מחושבים בדרך כלל בנקודות גאוס מכיוון שהן מציגות תכונות super convergent - כלומר, הן המיקומים המדויקים ביותר של הקירוב של האלמנטים הסופיים.
עבור אלמנטים משולשיים לינאריים, נקודת גאוס אחת במרכז המשולש (
מאמץ פון מיזס משמש להערכת כניעה בחומרים דקטיליים.
התהליך הנומרי כולל:
- עבור כל אלמנט: מיצוי התזוזות הצמתיות מהפתרון הגלובלי
- חישוב מטריצת העיבור-תזוזה:
- חישוב העיבורים:
- חישוב המאמצים:
- חישוב גדלים נוספים: מאמצים עיקריים, מאמץ פון מיזס, זוויות
תרגילים
שאלה 1

סכמת הבעיה.
נתונה הבעיה הבאה:
בנוסף, נתון כי:
פתרו את הבעיה עם שני אלמנטים משולשיים (מצב מאמצים מישורי).

רישות התחום.
פתרון:
שלב 1: הגדרת הרשת:
בהתאם לאיור, נחלק את התחום לשני אלמנטים משולשיים:
- אלמנט 1: צמתים
- אלמנט 2: צמתים
קואורדינטות הצמתים:
שלב 2: תנאי שפה ועומסים:
תנאי שפה קבועים (צומת
עומסים חיצוניים על הצד הימני (
העומס
אורך הצד:
כוח כולל:
העומס מתחלק שווה בין שני הצמתים:
שלב 3: מטריצת הקשיחות החומר:
עבור מצב מאמצים מישורי:
נציב ערכים:
שלב 4: חישוב מטריצות קשיחות אלמנטריות:
אלמנט
קואורדינטות:
מטריצת היעקוביאן:
אלמנט
קואורדינטות:
מטריצת היעקוביאן:
שלב 5: חישוב מטריצות הקשיחות האלמנטריות באמצעות אינטגרציית גאוס:
מטריצת הקשיחות האלמנטרית מחושבת לפי:
כאשר
עבור אלמנטים משולשיים לינאריים, מטריצות
עבור משולש מסטר,
לכן:
כאשר
חישוב המטריצה:
עבור שני האלמנטים (מכיוון שיש להם אותו
מכיוון ששני האלמנטים שלנו הם משולשים זהים מבחינת גודל וצורה (עם
הערה:
השימוש באינטגרציית גאוס עם
נותן תוצאה מדויקת עבור אלמנטים לינאריים מכיוון שהאינטגרנד קבוע על פני כל אלמנט מסטר.
שלב 6: הרכבת המטריצה הגלובלית:
מטריצת הקשיחות הגלובלית מגודל
וקטור התזוזות הגלובלי:
מיפוי צמתים לאלמנטים:
- אלמנט 1: צמתים
- אלמנט 2: צמתים
המטריצה הגלובלית לאחר הרכבה:
שלב 7: חישוב וקטור הכוחות האלמנטרי:
לפי שיטת האלמנטים הסופיים התלת-ממדית, וקטור הכוחות האלמנטרי מחושב באמצעות:
כאשר:
- הביטוי הראשון מייצג תרומת כוחות הגוף (body forces)
- הביטוי השני מייצג תרומת כוחות המשטח (traction forces)
חישוב תרומת כוחות הגוף:
במקרה שלנו,
חישוב תרומת כוחות המשטח:
העומס
עבור אלמנט
- נקודות הגאוס על הצלע: אנו משתמשים באינטגרציית גאוס חד-ממדית על הצלע
- היעקוביאן המשטחי:
עבור הצלע בין צמתים
- אורך הצלע:
- היעקוביאן:
וקטור הכוחות במערכת מקומית עבור הצלע (
עבור אינטגרציית גאוס חד-ממדית עם נקודה אחת (
פונקציות הצורה על הצלע במרכז הצלע (
- צומת
- צומת
לכן:
נציב:
וקטור הכוחות הגלובלי:
לאחר הרכבה גלובלית עם המיפוי
שלב 8: יישום תנאי השפה:
תנאי השפה:
עם הסידור החדש: DOFs
נמחק את שורות ועמודות
המטריצה המוקטנת (עבור
וקטור הכוחות (עבור
שלב 9: פתרון המערכת:
פתרון המערכת נותן:
פתרון סופי:
שלב 10: חישוב עיבורים ומאמצים (Post-Processing)
לאחר מציאת התזוזות, נחשב את העיבורים והמאמצים בכל אלמנט בנקודות גאוס, בהתאם לתיאוריה שפותחה למעלה.
אלמנט 1 (צמתים 1-2-3):
התזוזות הצמתיות:
בנקודת גאוס (
עיבורים:
מאמצים:
אלמנט 2 (צמתים 3-4-1):
התזוזות הצמתיות:
בנקודת גאוס (
עיבורים:
מאמצים:
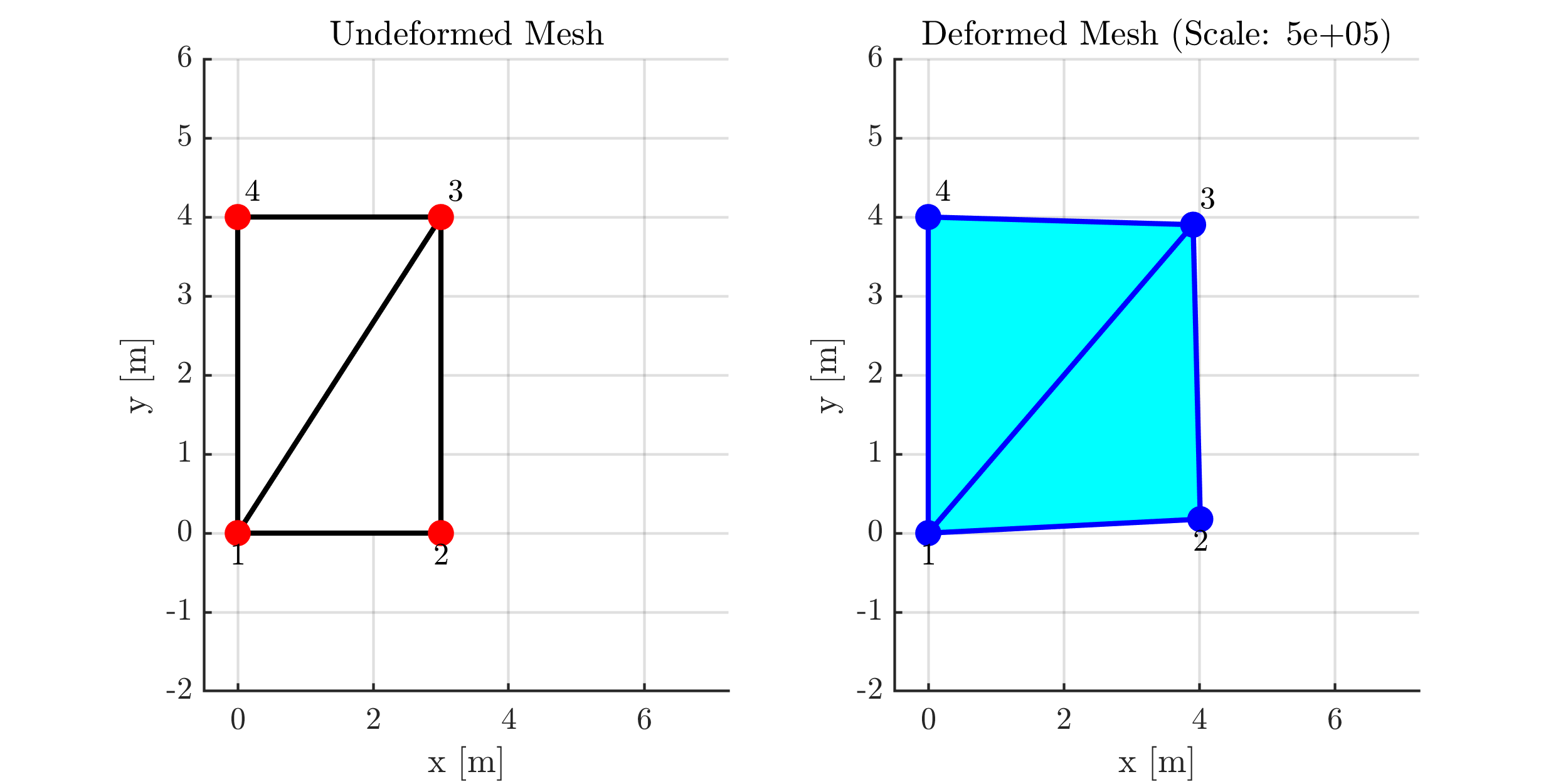
הגזמה של התזוזות לבעיה הנתונה.
שאלה 2
נתונה הבעיה משאלה קודמת עם שינוי קטן:

סכמת הבעיה.
פתרו את הבעיה עם שלושה אלמנטים משולשיים (מצב מאמצים מישורי):

רישות התחום.
פתרון:
שלב 1: הגדרת הרשת:
בהתאם לאיור, נחלק את התחום לשלושה אלמנטים משולשיים:
- אלמנט 1: צמתים
- אלמנט 2: צמתים
- אלמנט 3: צמתים
קואורדינטות הצמתים:
שלב 2: תנאי שפה ועומסים:
תנאי שפה קבועים (צומת
עומסים חיצוניים על הצד הימני המשופע:
העומס
- בצומת
- בצומת
חישוב אורך הצלע והכיוון:
אורך צלע
וקטור הצלע:
וקטור הנורמל (החוצה):
כוחות צמתיים שקולים להתפלגות משולשית:
עבור התפלגות משולשית מ-
- בצומת הקטן (
- בצומת הגדול (
רכיבי הכוחות:
שלב 3: מטריצת הקשיחות החומר:
עבור מצב מאמצים מישורי:
נציב ערכים:
שלב 4: חישוב מטריצות קשיחות אלמנטריות:
אלמנט
קואורדינטות:
אלמנט
קואורדינטות:
אלמנט
קואורדינטות:
שלב 5: מטריצות הקשיחות האלמנטריות:
לכל שלושת האלמנטים
עם הממד
שלב 6: הרכבת המטריצה הגלובלית:
מטריצת הקשיחות הגלובלית בגודל
וקטור התזוזות הגלובלי:
המטריצה הגלובלית לאחר הרכבה:
שלב 7: וקטור הכוחות הגלובלי:
העומסים פועלים על צמתים
שלב 8: יישום תנאי השפה:
תנאי השפה הם:
נישאר עם DOFs:
שלב 9: פתרון המערכת:
לאחר פתרון המערכת המוקטנת באמצעות MATLAB, נקבל את התזוזות הצמתיות.
פתרון סופי:
שלב 10: חישוב עיבורים ומאמצים (Post-Processing)
לאחר מציאת התזוזות, נחשב את העיבורים והמאמצים בכל אלמנט בנקודות גאוס, בהתאם לתיאוריה שפותחה למעלה.
אלמנט 1 (צמתים 1-2-3):
התזוזות הצמתיות:
בנקודת גאוס (
עיבורים:
מאמצים:
אלמנט 2 (צמתים 3-4-1):
התזוזות הצמתיות:
בנקודת גאוס (
עיבורים:
מאמצים:
אלמנט 3 (צמתים 2-5-3):
התזוזות הצמתיות:
בנקודת גאוס (
עיבורים:
מאמצים:
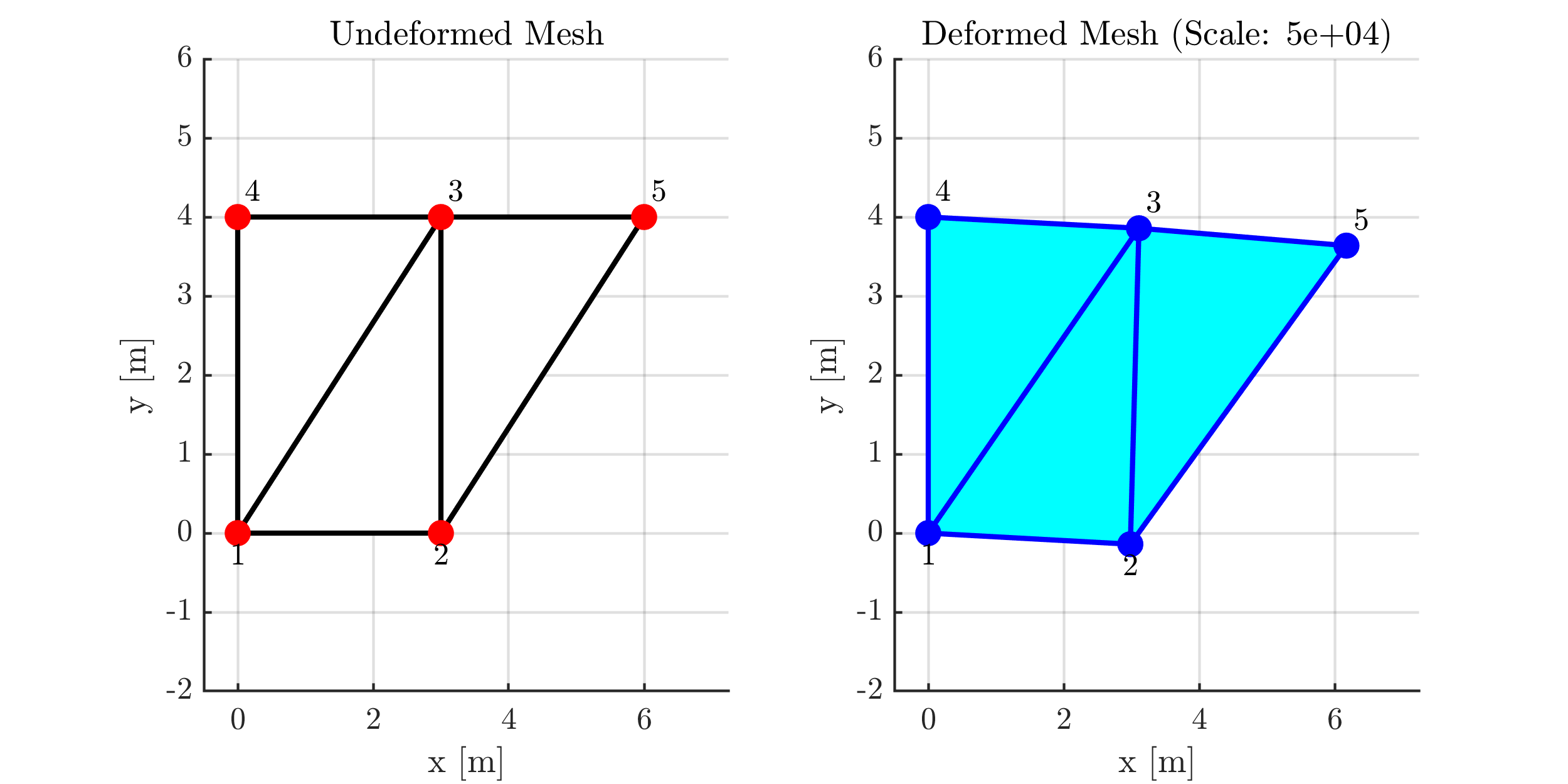
הגזמה של התזוזות לבעיה הנתונה.