קריטריון נייקוויסט
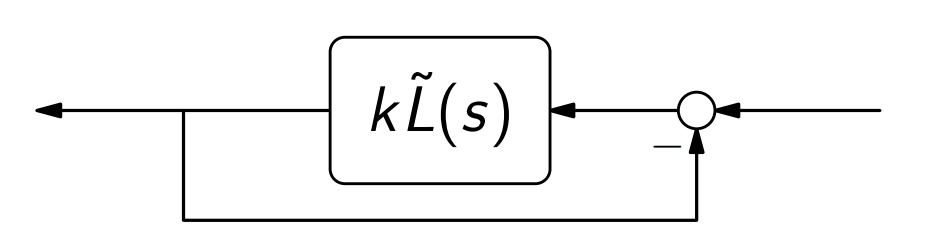
כדי לפשט את הדרישות שלנו על החוג הסגור, נחליף את
ב:
בעיצוב החוג הסגור אנו רוצים:
- תדירות מעבר
- הגבר גבוה (
- הגבר נמוך (
- הרחקת
- יציבות יציבות יציבות.
כדי לקבל את התנאי האחרון, היציבות, אנו יכולים להיעזר בפולינום האופייני של המערכת, או בעזרת שיטת המג”ש, אבל אף אחד מהם לא עושה זאת במובנים של תגובת תדירות של
עיקרון הארגומנט של קושי
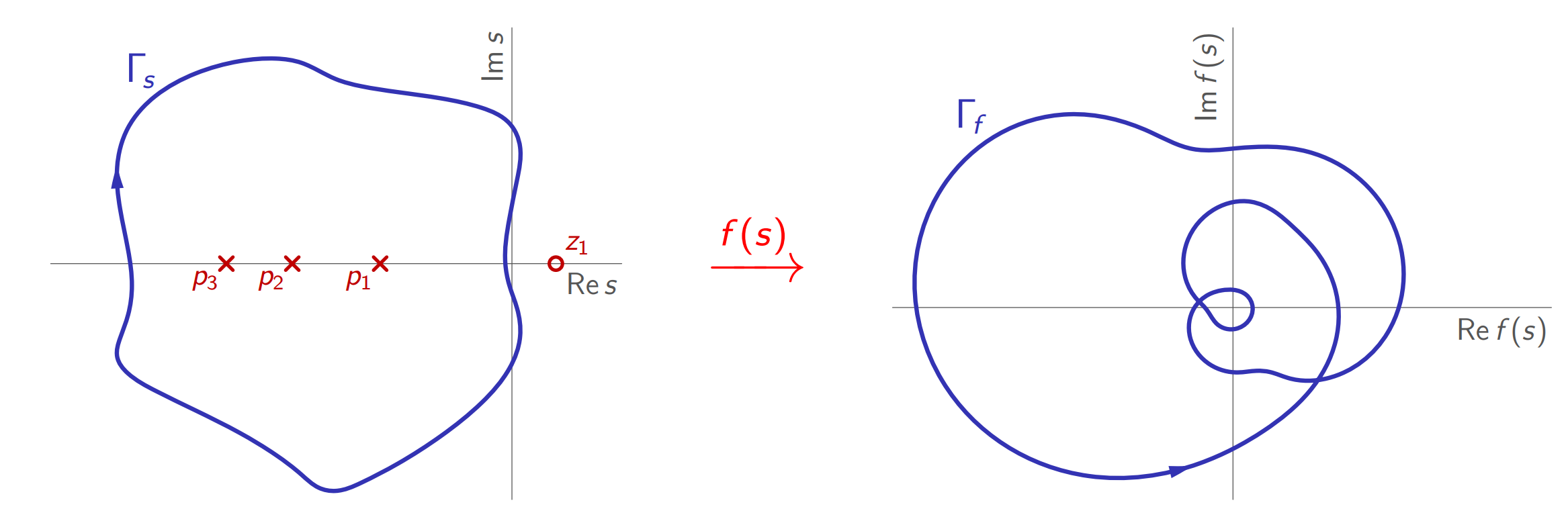
תהי פונקציה מרוכבת
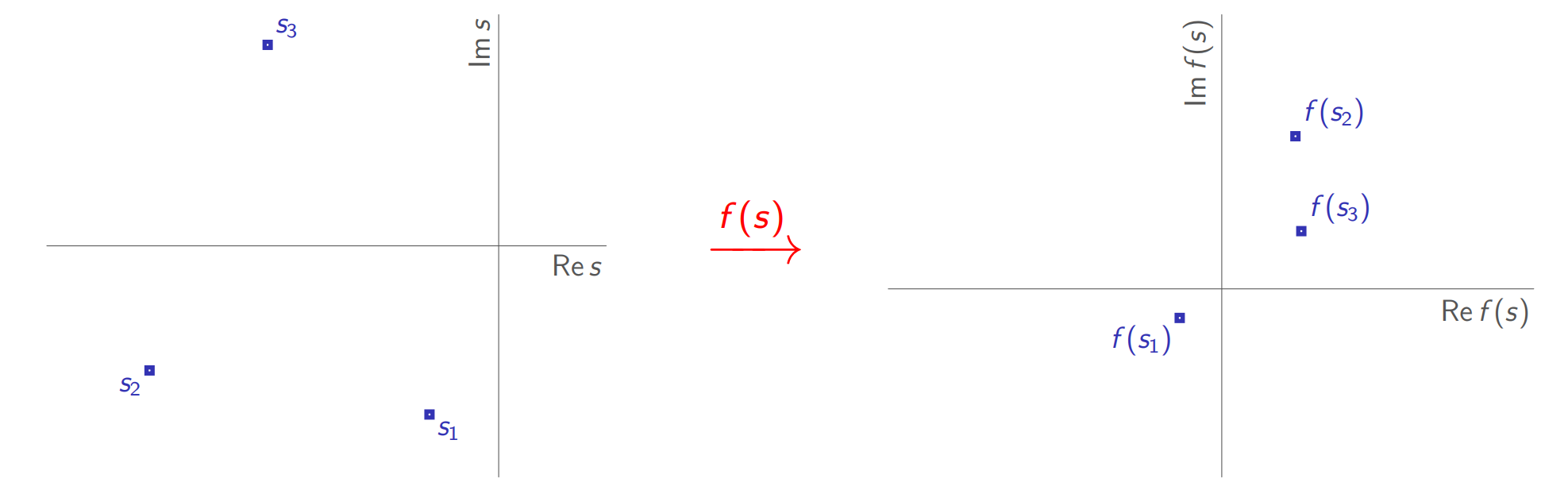
העתקה
של מספר נקודות. (Leonid Mirkin’s Homepage, n.d.).
אם נבצע את ההעתקה לרצף של נקודות
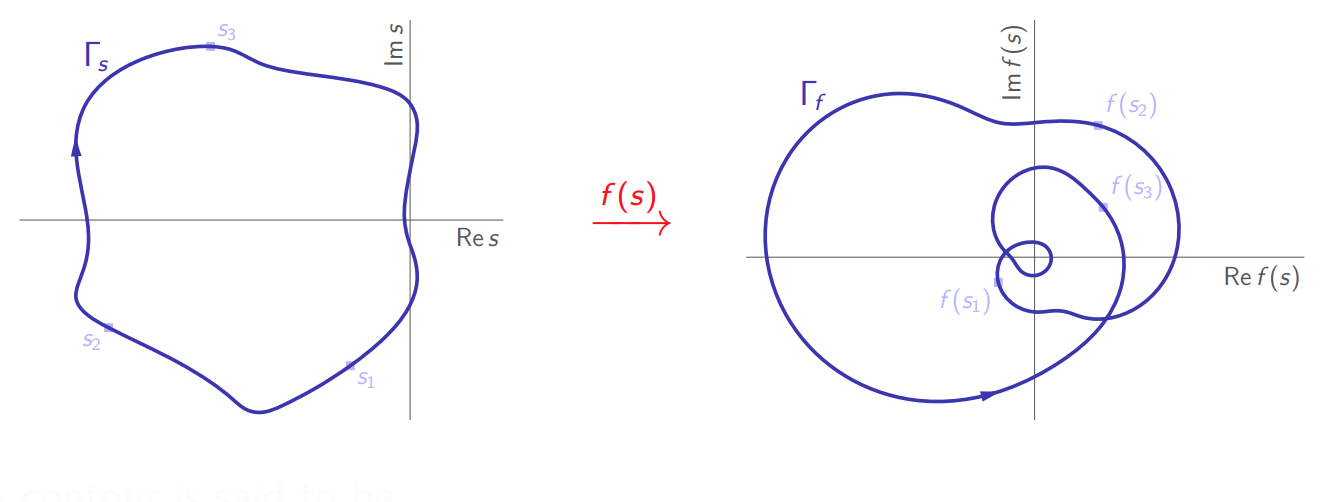
העתקה
של עקומה סגורה פשוטה. (Leonid Mirkin’s Homepage, n.d.).
כמו בחדו”א, נאמר שעקומה היא פשוטה אם היא לא חותכת את עצמה, ונאמר שהיא סגורה אם היא מתחילה ומסתיימת באותה הנקודה. מבין העקומות לעיל,
משפט:
תהי
עקומה פשוטה וסגורה, מרומורפית (meromorphic) (כמו גזירה למקוטעין לפונקציות מרוכבות) בתוך ו-על , הוא מספר האפסים של בתוך , ו- הוא מספר הקטבים של בתוך . אזי:
אםלא עובר דרך האפסים או הקטבים של , אז מקיף את הראשית פעמים עם כיוון השעון כאשר מתקדמת ב- עם כיוון השעון.
למשל, עבור
עם
העתקה
על עקומה . (Leonid Mirkin’s Homepage, n.d.).
לכן
נוכל גם להפעיל את אותו העיקרון אם ישנה הזזה בקבוע. למשל, אם
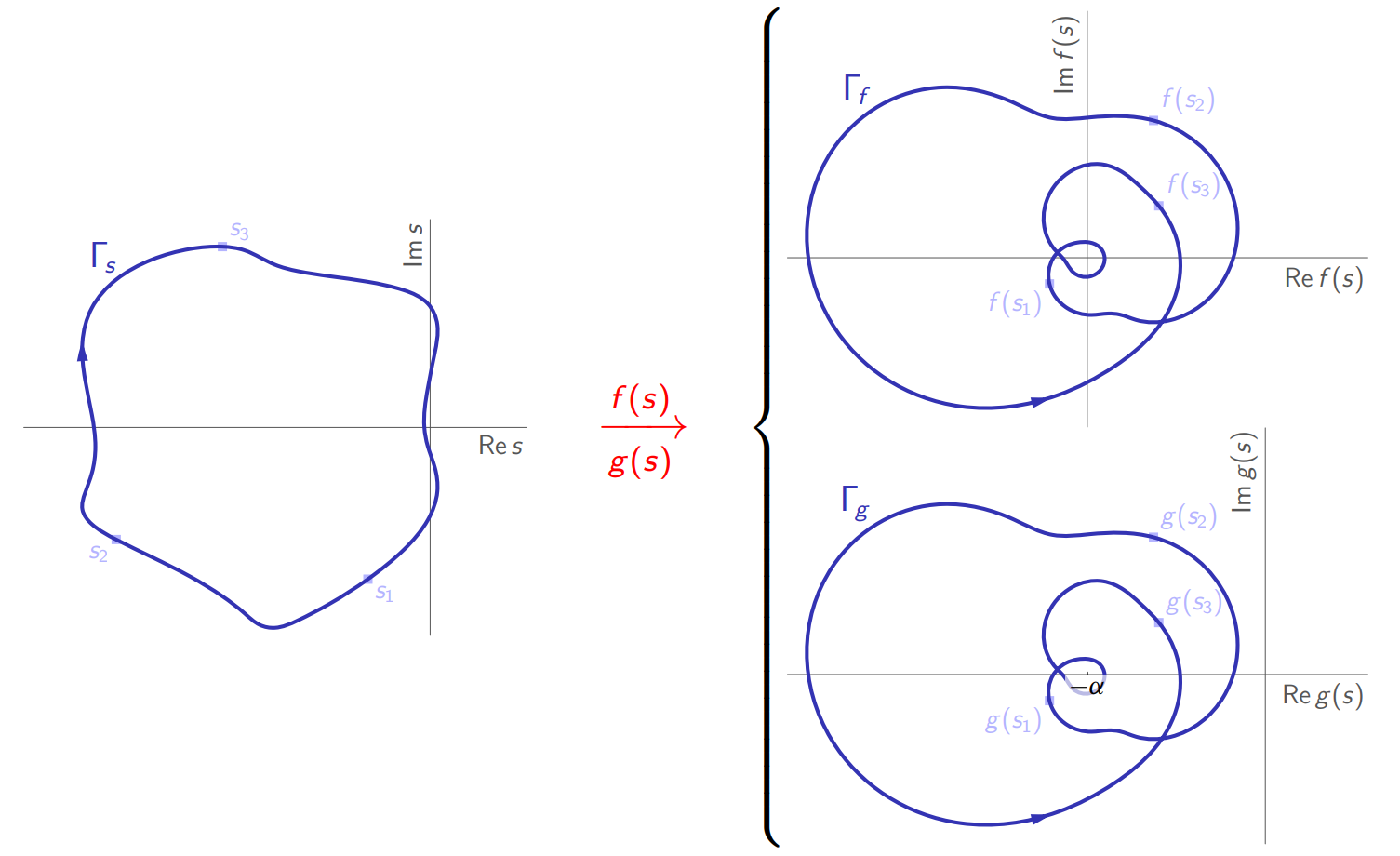
העתקה
ו- . (Leonid Mirkin’s Homepage, n.d.).
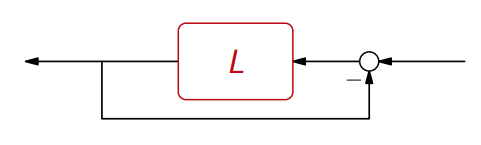
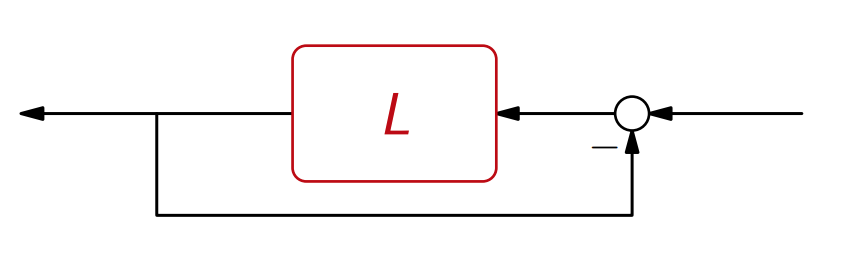
פונקציית ה-return difference
יהי
שראינו בפרק קודם - פונקציית התמסורת של החוג. נניח כי אין צמצומים לא יציבים בין
הנקראת return difference. מהקשר לעיל ניתן לראות ש:
- קטבים לא יציבים של
- אפסים לא יציבים של
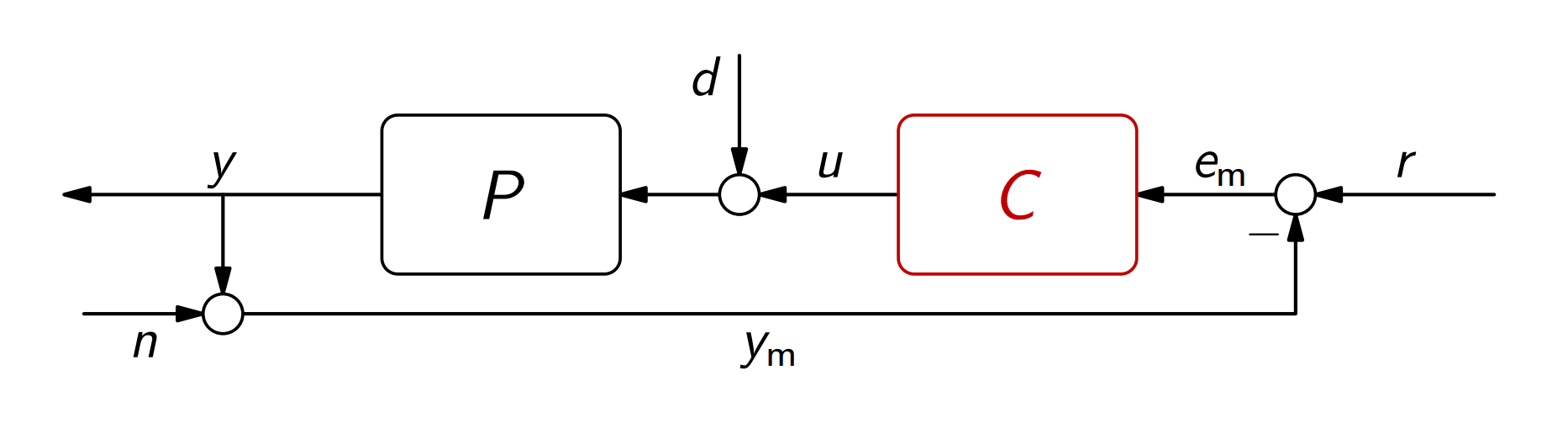
נביט במערכת הבא:
נניח כי
בהמשך הפרק אנו הולכים לבצע את השלבים הבאים:
- נגדיר עקומה סגורה פשוטה
- נמצא את ההעתקה
- נספור את מספר הסיבובים
כאשר:
- המספר
- המספר
האם נעביר אגפים במשוואה לעיל:
אנחנו רוצים ש-
ראינו שהקשר בין המישור
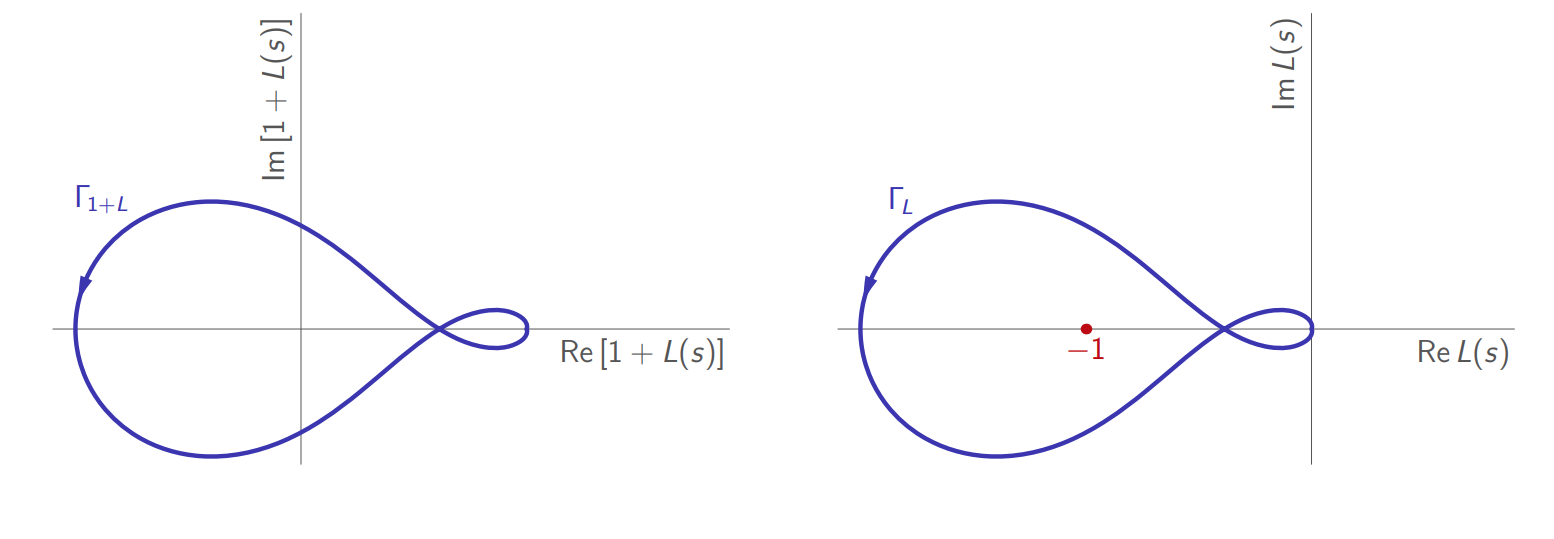
הזזה אופקית במישור.
לכן, מספר ההקפות סביב הראשית של
עקום נייקוויסט
העקום
כאשר
נקרא קונטור נייקוויסט, כאשר
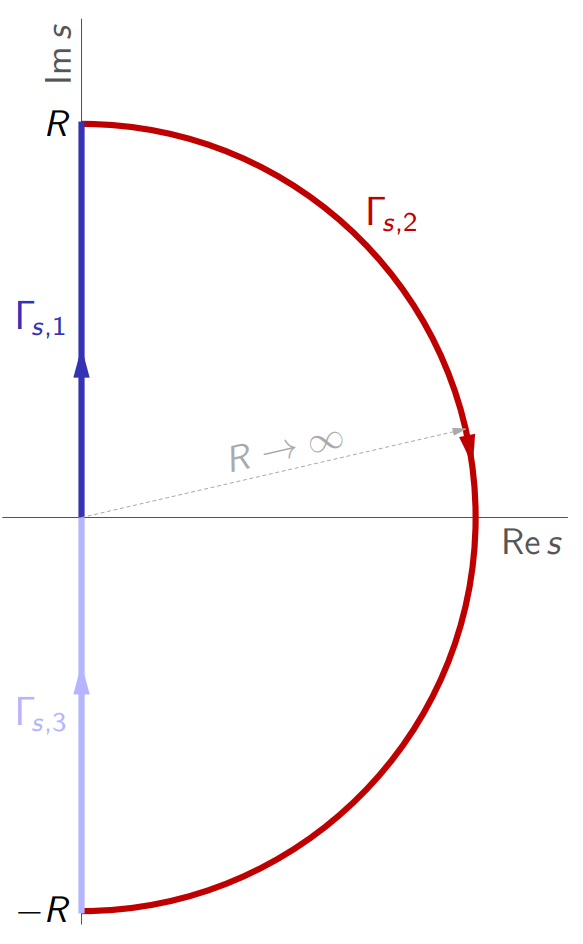
קונטור נייקוויסט.
כעת נרצה לדעת מהי ההעתקה של קונטור נייקוויסט לפי פונקציה כלשהי
- עבור
במקרה זה - עבור
מאחר ו- - עבור
זהו מקרה זהה ל-
האיחוד של
נוכל לבנות את עקום זה בשני שלבים:
- נבנה את הגרף הפולארי של
- נוסיף את המראה של הגרף הפולארי סביב הציר הממשי.
קריטריון יציבות נייקוויסט
משפט:
המערכת בחוג סגור יציבה אמ”ם עקום נייקוויסט של
:
- לא חותכת את הנקודה הקריטית
. - סובבת סביב הנקודה הקריטית
פעמים נגד כיוון השעון כאשר גדל מ- ל- , ו- הוא מספר הקטבים של ב- .
עיקרון ראשון:
אם עקומת נייקוויסט של
כאשר
עיקרון שני:
עם עקומת נייקוויסט של
עיקרון שלישי:
אם
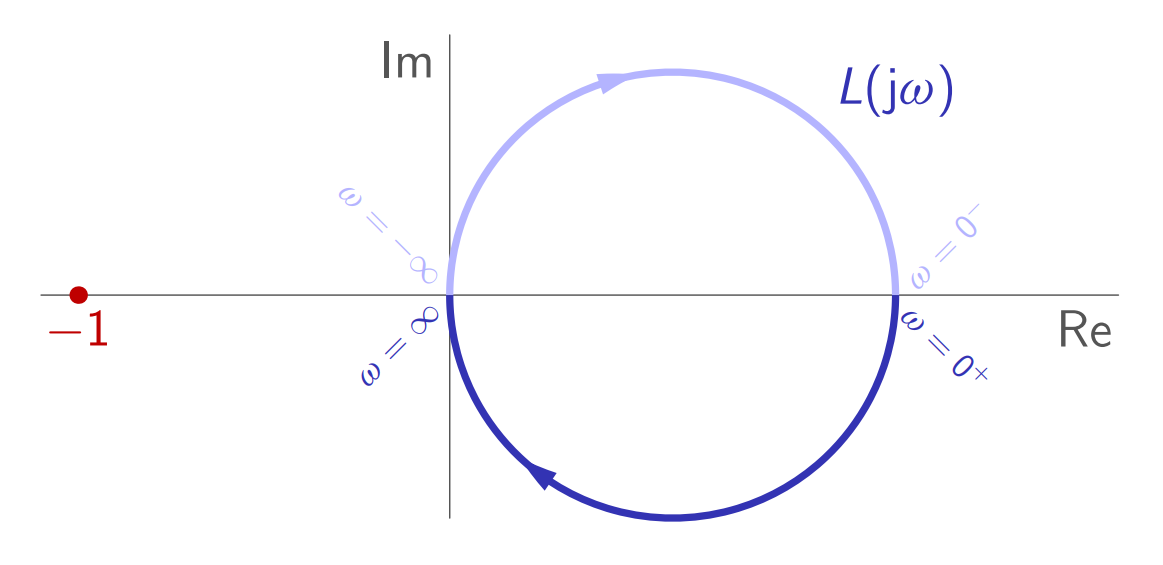
דוגמה:
יהי
. העקום נייקוויסט שלו הוא:
קיבלנו ש-הוא יציב (כי ), וגם העקום נייקוויסט לא סובב את הנקודה הקריטית. לכן, המערכת בחוג סגור יציבה.
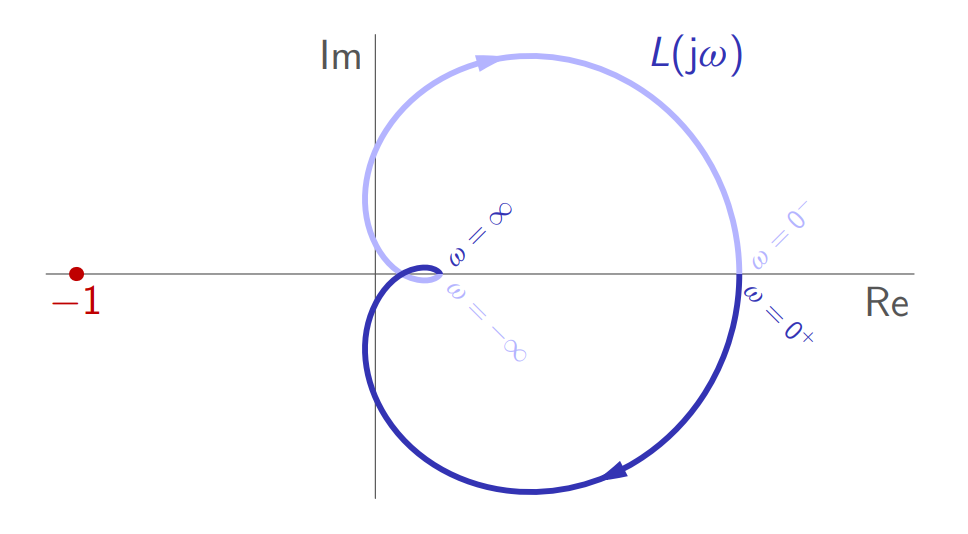
דוגמה:
יהי
. העקום נייקוויסט שלו הוא:
קיבלנו ש-הוא יציב (כי ), וגם העקום נייקוויסט לא סובב את הנקודה הקריטית. לכן, המערכת בחוג סגור יציבה.
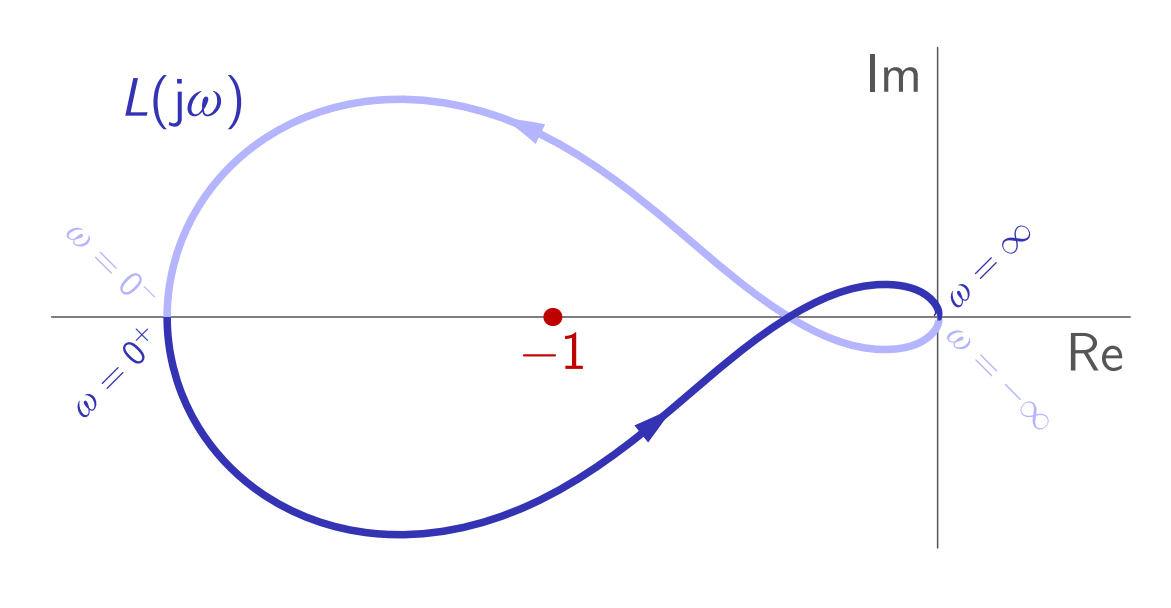
דוגמה:
יהי
. העקום נייקוויסט שלו:
קיבלנו ש-לא יציב עם קוטב אחד לא יציב (אז ). בנוסף, העקום נייקוויסט סובב את הנקודה הקריטית פעם אחת נגד כיוון השעון. לכן, המערכת בחוג סגור יציבה.
מומלץ לראות את הדוגמאות הנוספות במצגת.
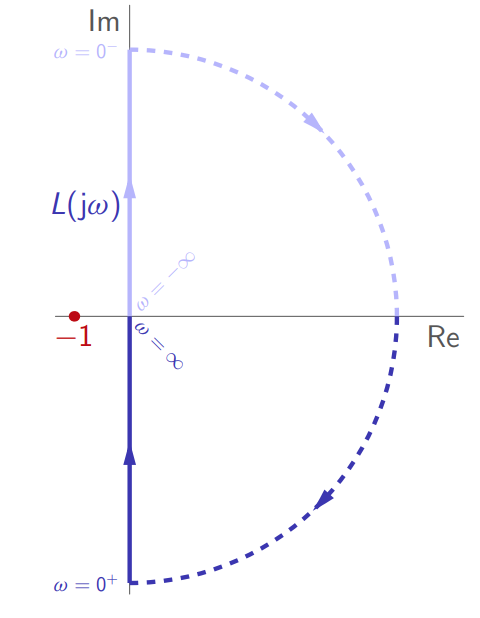
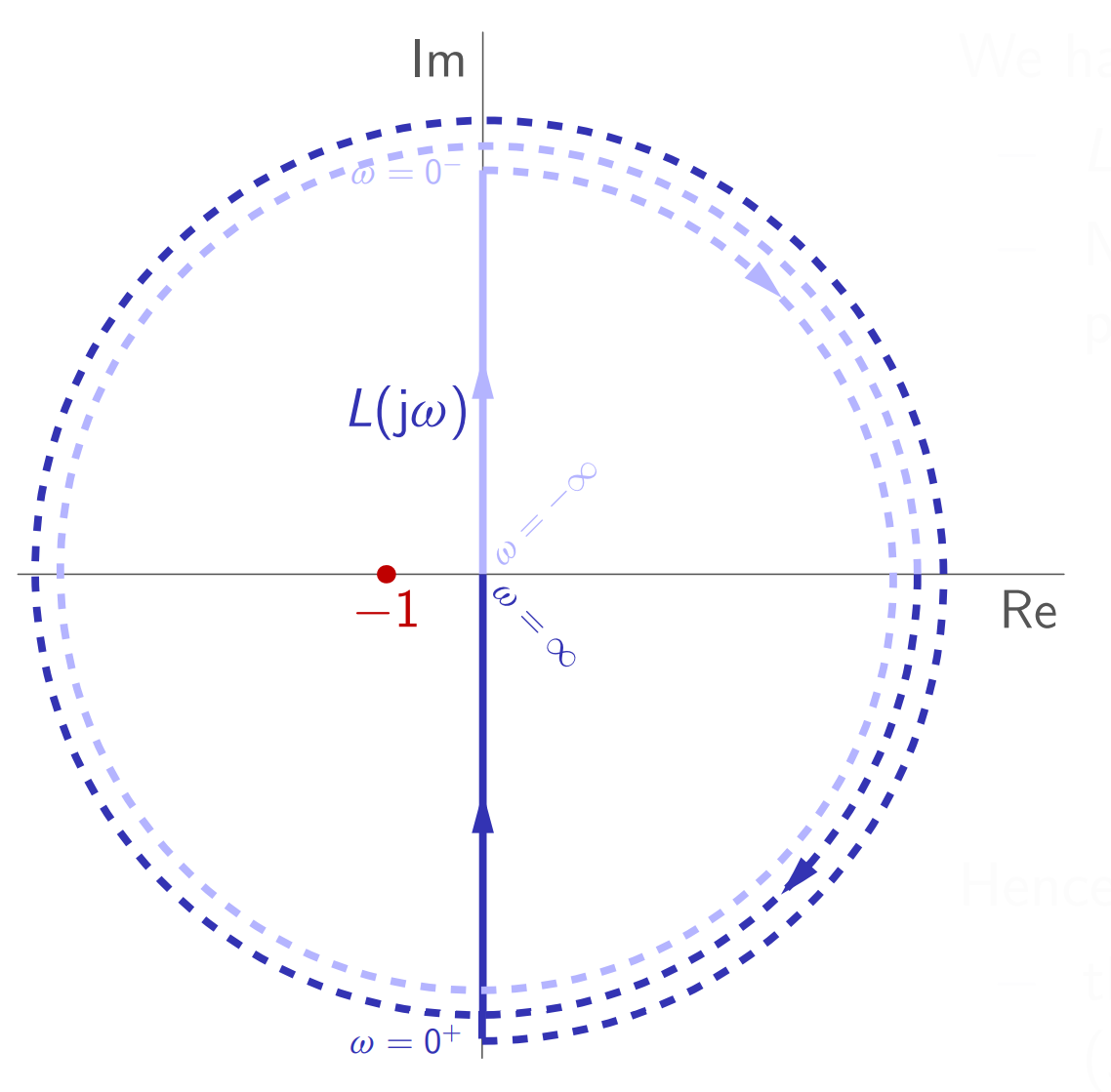
עקום נייקוויסט כללי
עד כה הנחנו של-
כאשר
עם
ההעתקה של
- עבור
יהי - עבור
מאחר ו-
הערה:
האיחוד
הוא קשת המחברת את הקצוות של וההתחלה של דרך הזווית עם כיוון השעון.
כעת, כיוון שהקונטור נייקוויסט המתוקן לא כולל את הקטבים של
דוגמה:
יהי
. העקום נייקוויסט שלו:
קיבלנו ש-“יציב” ( ), והעקום נייקוויסט שלו לא מקיף את הנקודה הקריטית. לכן, המערכת בחוג סגור יציבה.
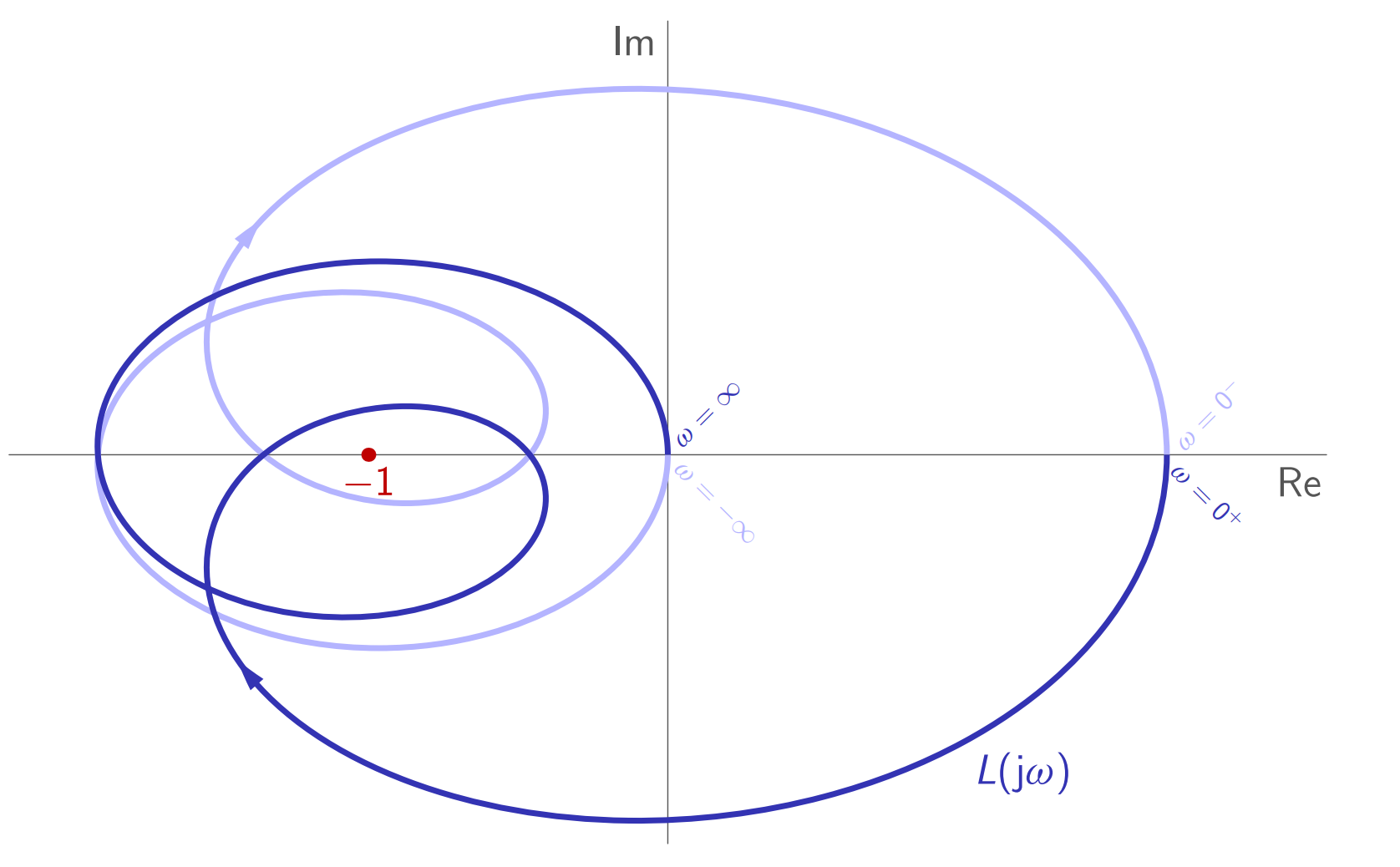
דוגמה:
יהי
. העקום נייקוויסט שלו הוא:
קיבלנו ש-
“יציב” ( ), והעקום נייקוויסט שלו סובב את הנקודה הקריטית פעמיים עם כיוון השעון. לכן, המערכת בחוג סגור לא יציבה ( ).
מומלץ לראות את הדוגמאות הנוספות במצגת.
פישוטים על הקריטריון ליציבות
ספירת ההקפות נגד כיוון השעון בגרף מסועף יכולה להיות בעייתית:
עקומת נייקוויסט מעצבנת לניתוח. יש במקרה זה
סיבובים נגד כיוון השעון.
אבל, בעזרת טופולוגיה, ישנה שיטה לפישוט מציאת מספר ההקפות.
תהי קרן
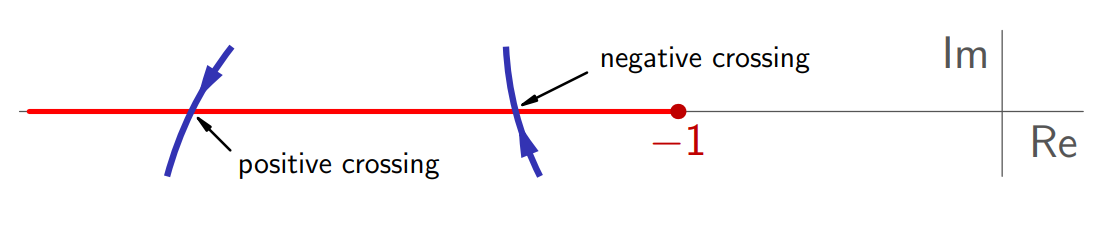
נאמר שישנו חיתוך כאשר העקומה של
למה:
מספר ההקפות נגד כיוון השעון סביב הנקודה הקריטית ע”י עקום נייקוויסט של
שווה למספר החיתוכים עם הקרן ע”י עקום נייקוויסט של .
חיתוכים של עקום נייקוויסט עם הקרן.
למה:
מספר ההקפות נגד כיוון השעון סביב הנקודה הקריטית ע”י עקום נייקוויסט של
שווה לפי- מספר החיתוכים עם הקרן ע”י הגרף הפולארי של .
חיתוכים של הגרף הפולארי עם הקרן.
עלינו להיזהר ממקרים בהם הגרף הפולארי מתחיל או מסתיים על הקרן. במצבים אלו, נחשיב את נקודות אלו כ-”חצי חיתוך”.
ניתוח חוגים
בהנחה ויש לנו מערכת מהצורה:
כאשר
נוכל לרשום את פונקציית התמסורת return difference כ:
מאחר וההכפלה ב-
דוגמה:
יהי
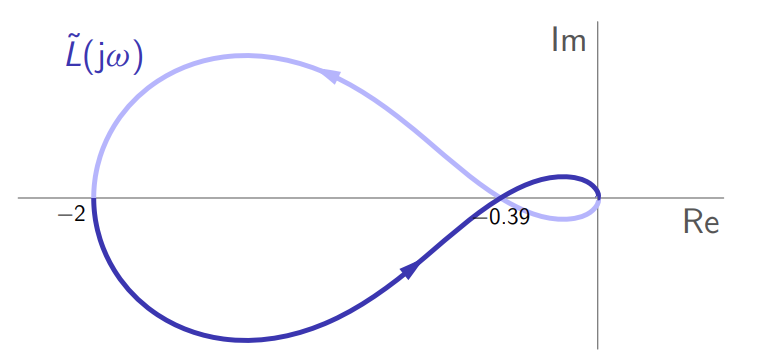
. העקום נייקוויסט שלו הוא:
במקרה זה,, וישנם ארבעה קטעים שונים של עבורם נקבל יציבויות שונות:
- עבור
, אין הקפות, ולכן . - עבור
, יש הקפה אחת נגד כיוון השעון, ולכן . - עבור
, יש הקפה אחת עם כיוון השעון, ולכן . - עבור
, אין הקפות, ולכן .
תרגילים
תרגיל 1
התהליך
מבוקר בחוג סגור (משוב יחידה) ע”י בקר פרופורציונלי
פתרון:
החוג הפתוח:
נעבוד במה שנקרא שיטת הנקודה הצפה. נגדיר:
נבדוק איפה
לכן הפאזה:
נשווה ל-
אנו מקבלים גם
נשים לב שכאשר
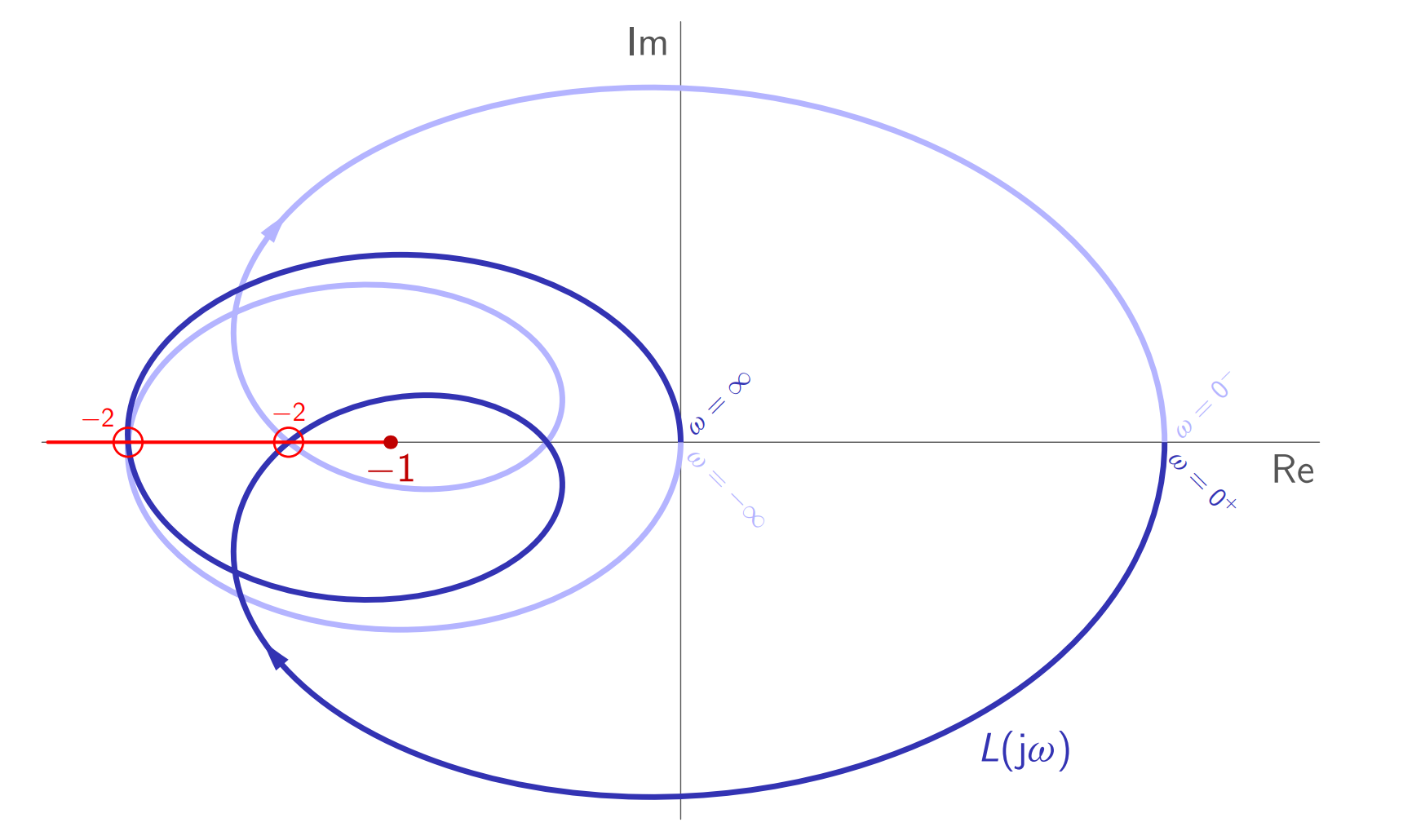
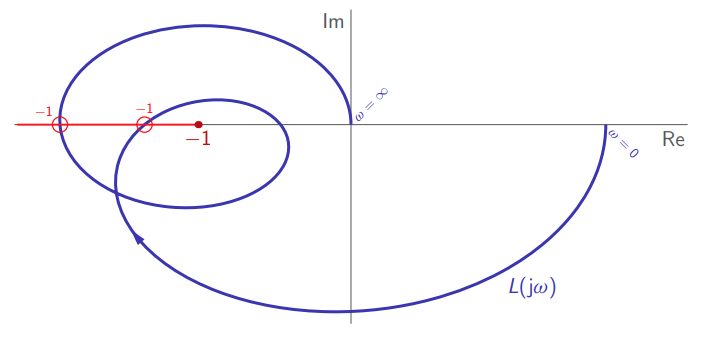
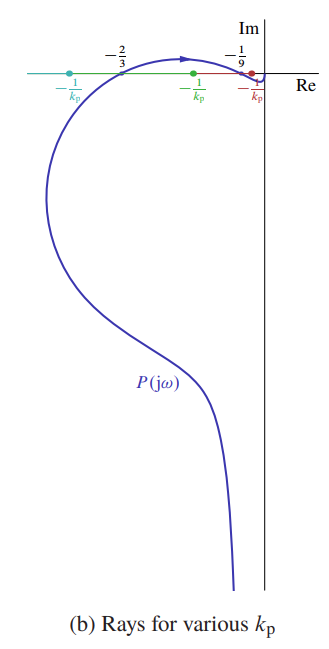
ממיקומים אלו, אנו יודעים לשרטט את עקום נייקוויסט:
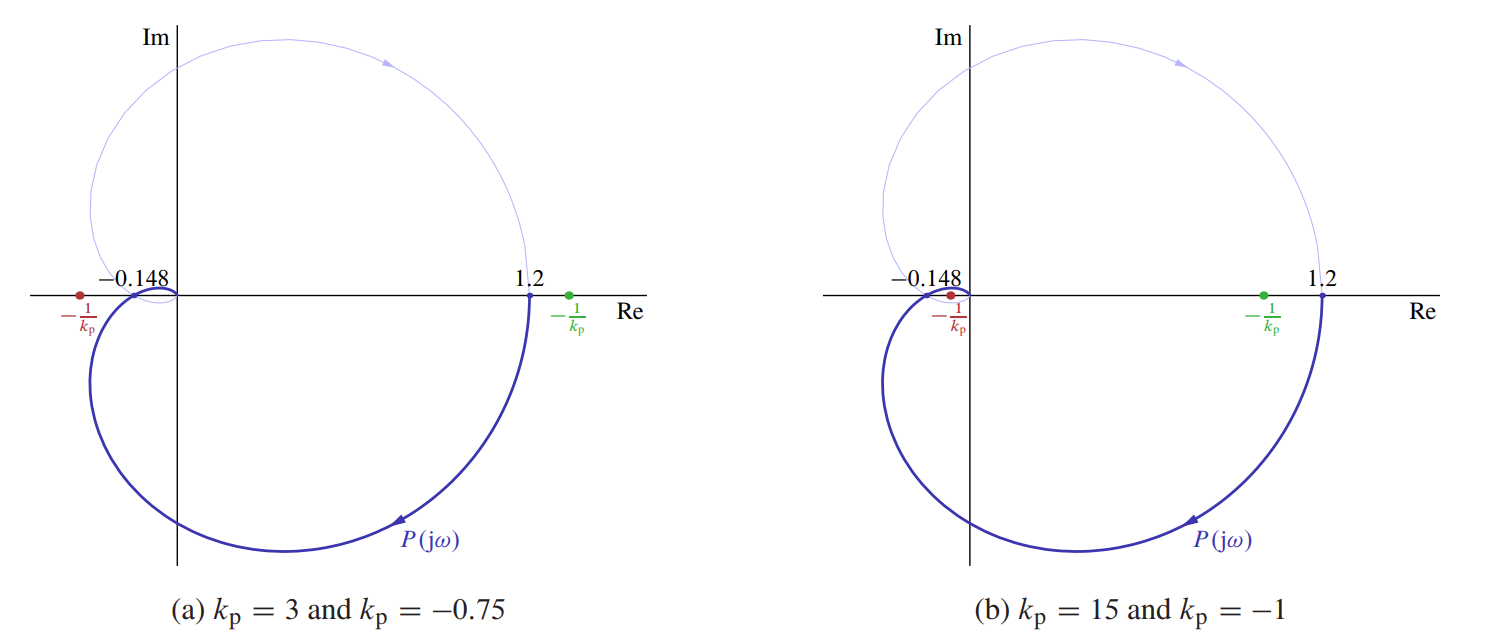
עקומות נייקוויסט עם מיקומי נקודות קריטיות שונים.
מאחר ו-
- אם
- אם
- אם
- אם
אם נסתכל במג”ש:
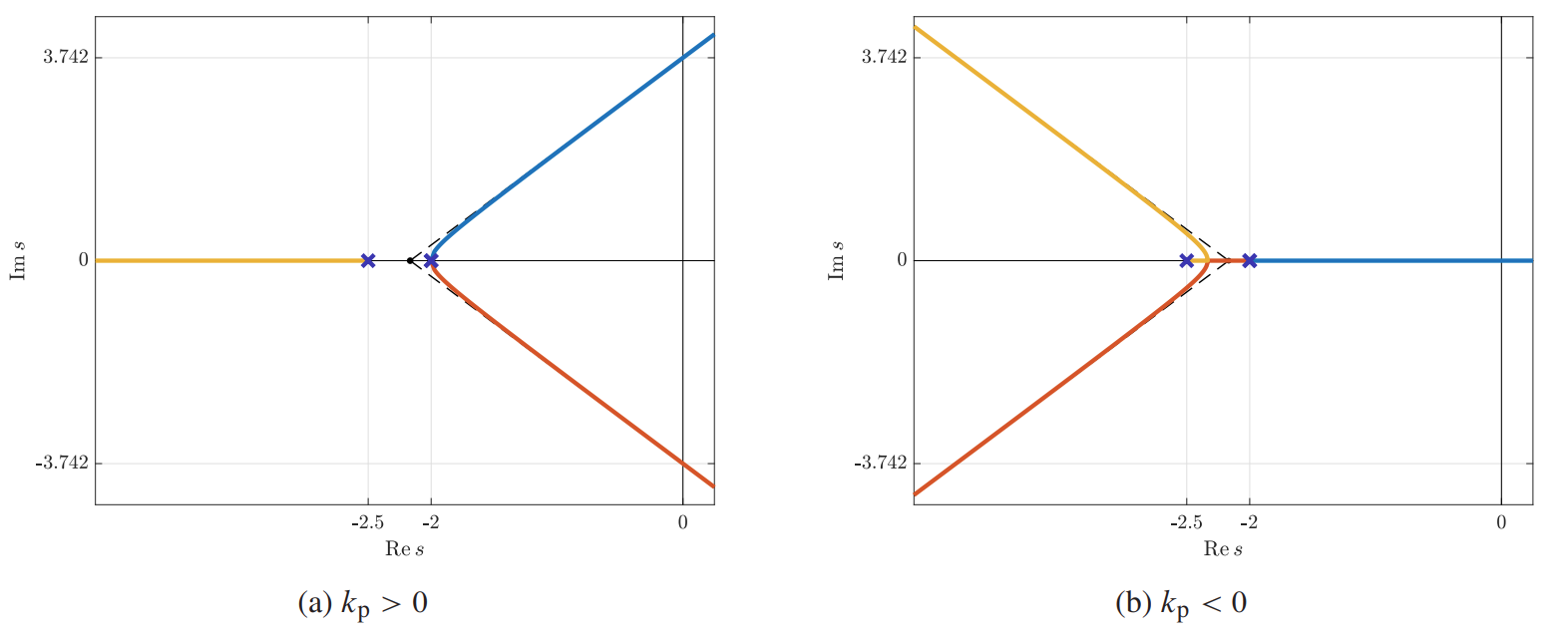
דיאגרמות מג”ש לבעיה.
תרגיל 2
התהליך
מבוקר בחוג סגור (משוב יחידה) ע”י בקר פרופורציוני
פתרון:
נעשה את אותו התהליך. נתחיל מהפאזה:
נסיק
החיתוכים עם הציר הממשי:
לאחר עוד כמה פיתוחים מעצבנים נקבל ש:
החיתוכים מתרחשים ב:
כדי לצייר את הגרף הפולארי של
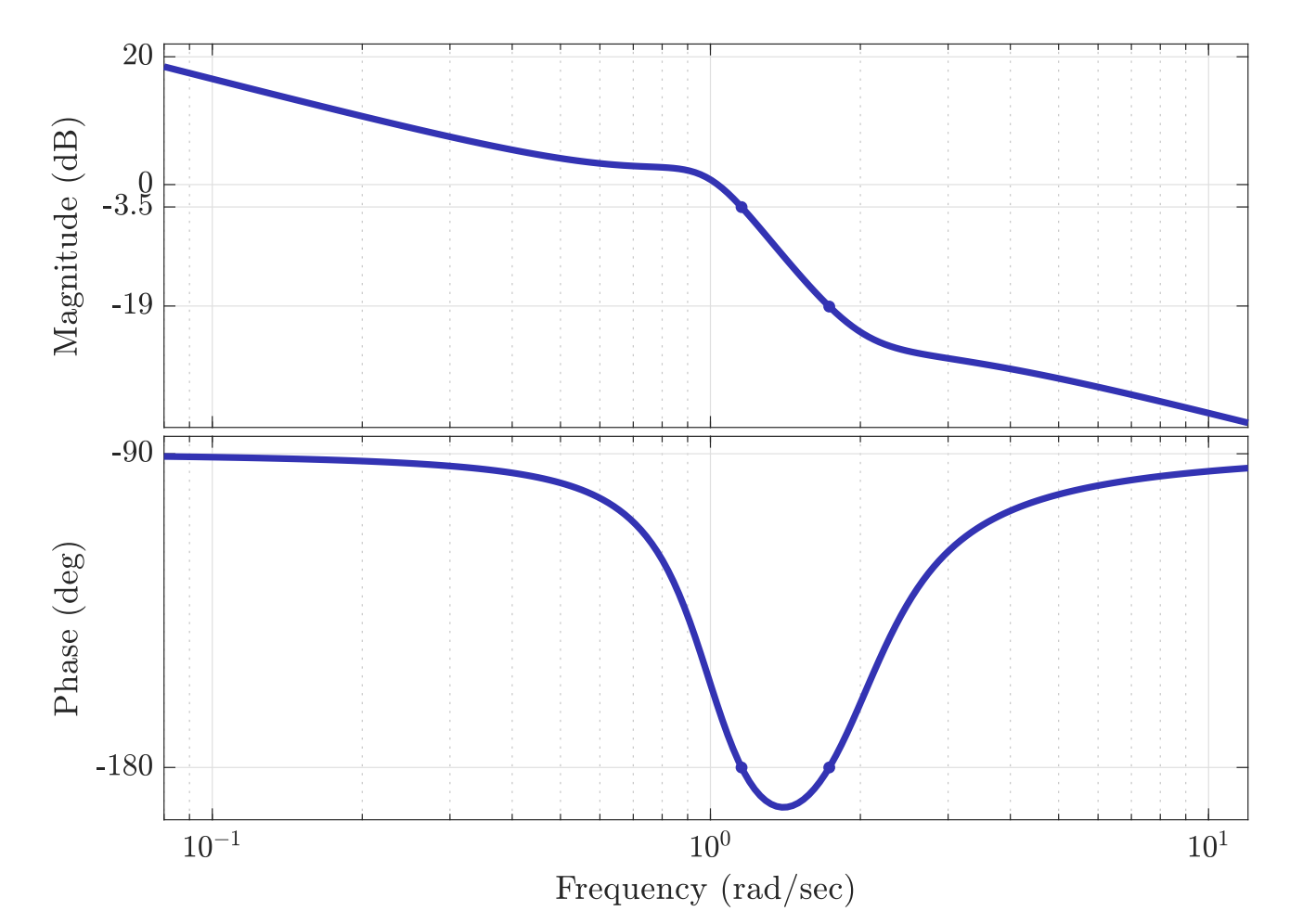
גרף בודה של
.
מגרף בודה זה אנו יודעים לשרטט את הגרף הפולארי:
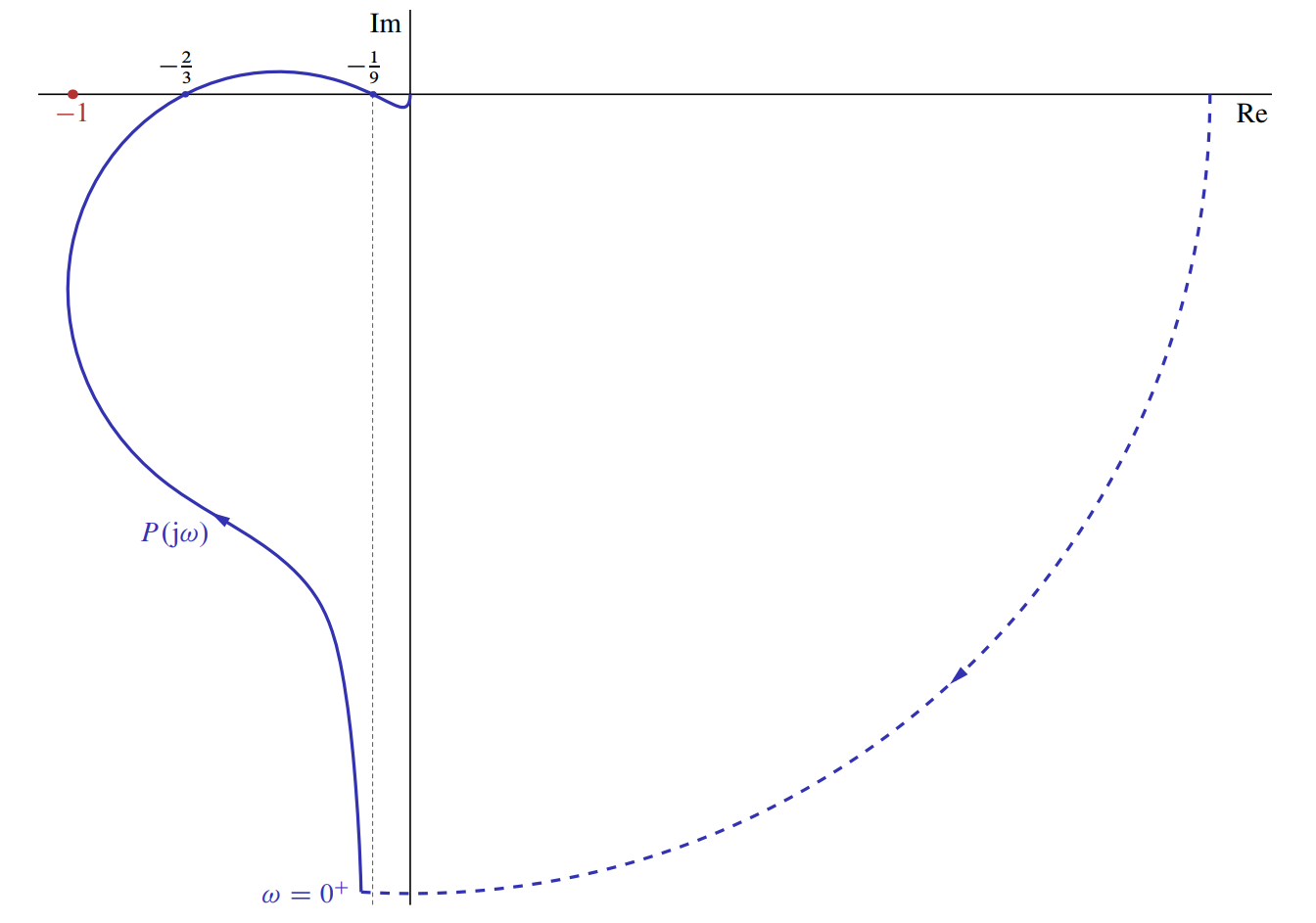
הגרף הפולארי של
(ללא המראה שלו). ההשלמה שלו ברבע מעגל היא כתוצאה מהאינטגרטור.
נמצא את מספר הסיבובים לפי חיתוכים עם הקרן:
ערכי
שונים.
מאחר ו-
- אם
- אם
- אם