עודפי יציבות
עודפי הגבר ופאזה
בהנחה ומערכת בחוג סגור יציבה:
הגדרה: עודף הגבר ופאזה
עודף הגבר
הוא המקדם המינימלי עבורו ההגבר בחוג סגור יהפוך את החוג הסגור ללא-יציב.
עודף פאזההוא הגודל המינימלי עבורו הפאזה בחוג סגור תהפוך את החוג הסגור ללא-יציב.
בשני המקרים, התוצאה של השינוי בהגבר ובפאזה יגרום לעקום נייקוויסט לחתוך את הנקודה הקריטית.
מה קורה כאשר רק ההגבר משתנה?
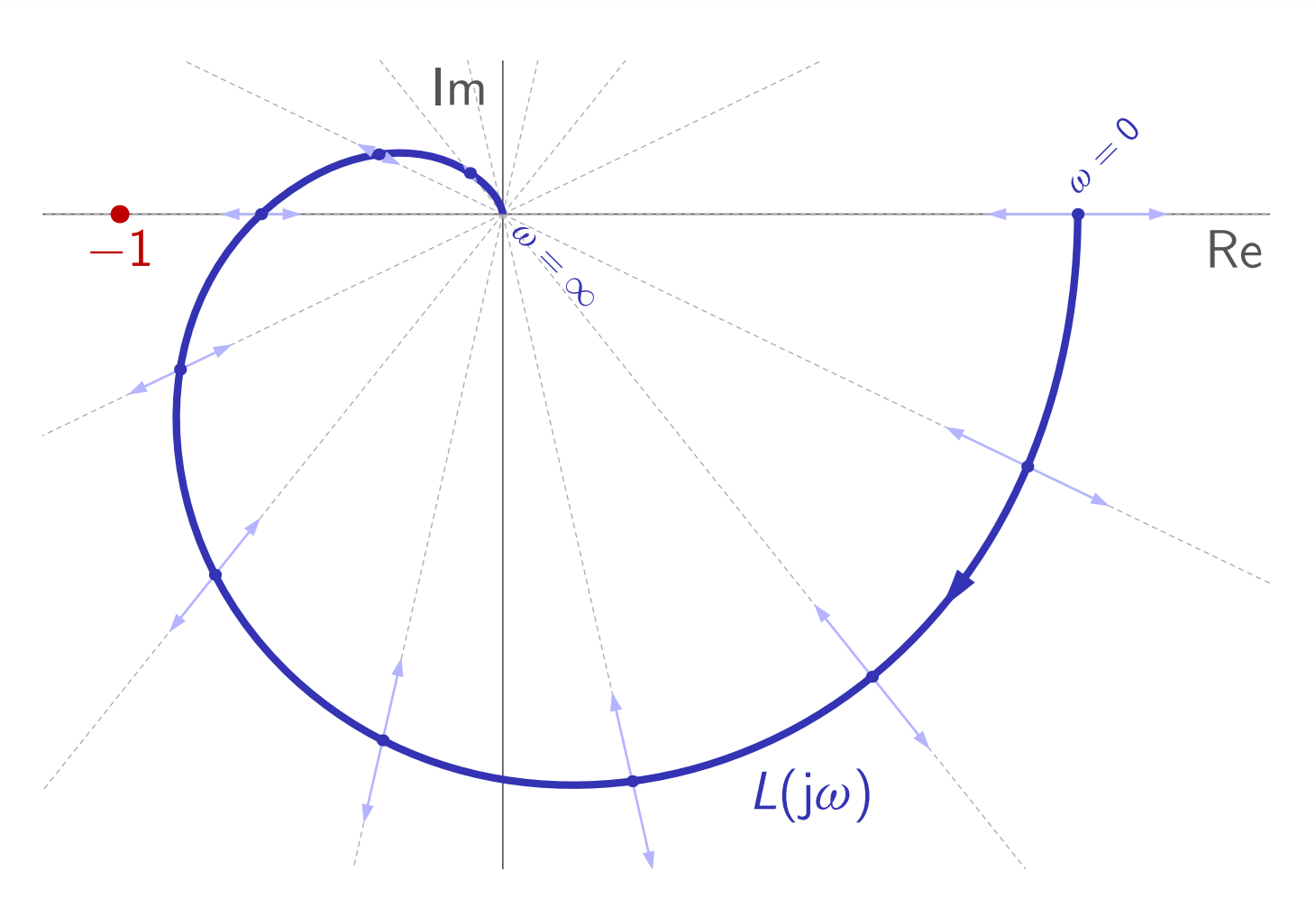
כאשר ההגבר בחוג גדל, העקום הפולארי מתנפח. כאשר ההגבר בחוג קטן, העקום הפולארי מתכווץ. (Leonid Mirkin’s Homepage, n.d.).
מבחינת
לתדרים בהם המעבר מתרחש קוראים תדרי מעברי פאזה
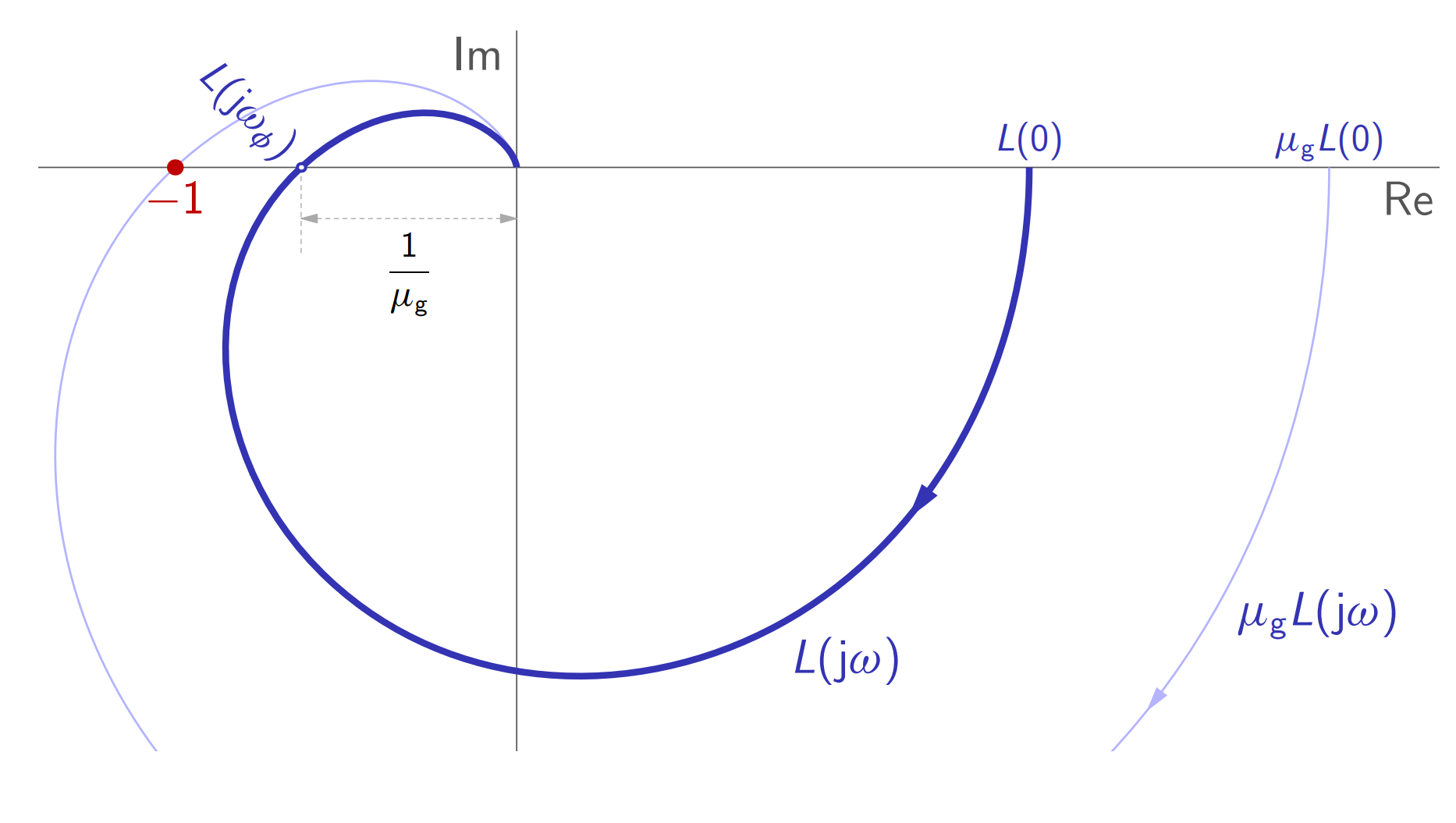
התנפחות עקום נייקוויסט עד לחיתוך עם הנקודה הקריטית. (Leonid Mirkin’s Homepage, n.d.).
מה קורה כאשר רק הפאזה משתנה?
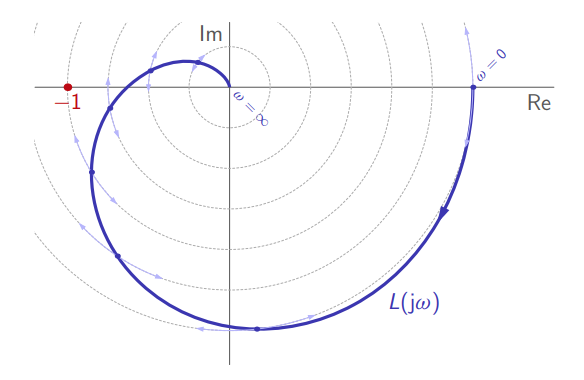
כאשר הפאזה גדלה, נקודות על הגרף הפולארי מסתובבות נגד כיוון השעון. כאשר הפאזה קטנה, נקודות על הגרף הפולארי מסתובבות עם כיוון השעון. (Leonid Mirkin’s Homepage, n.d.).
מבחינת
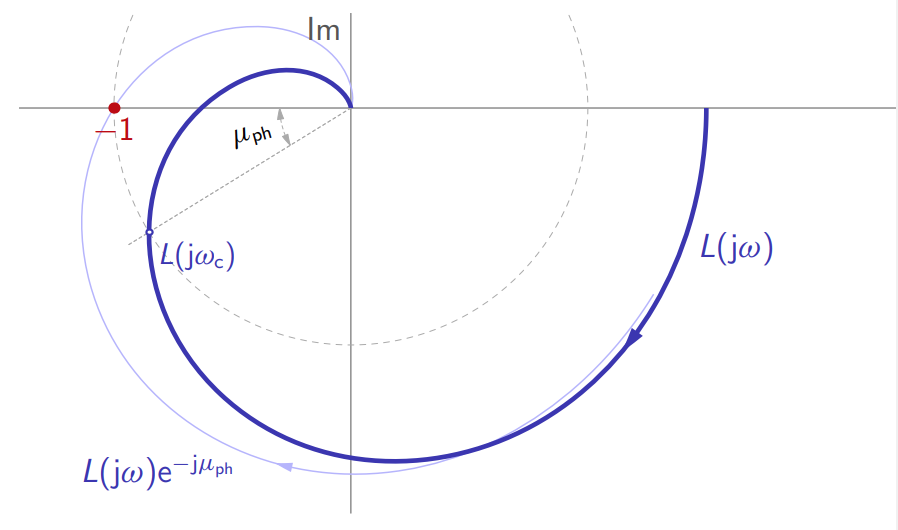
סיבוב עקום נייקוויסט עד לחיתוך עם הנקודה הקריטית. (Leonid Mirkin’s Homepage, n.d.).
נזכור שלתדירות בחיתוך עם נקודה זו אנו קוראים תדירות מעבר.
עודפי הגבר ופאזה בדיאגרמת בודה
כדי לחשב את
- עודף ההגבר
- עודף הפאזה
למשל, עבור
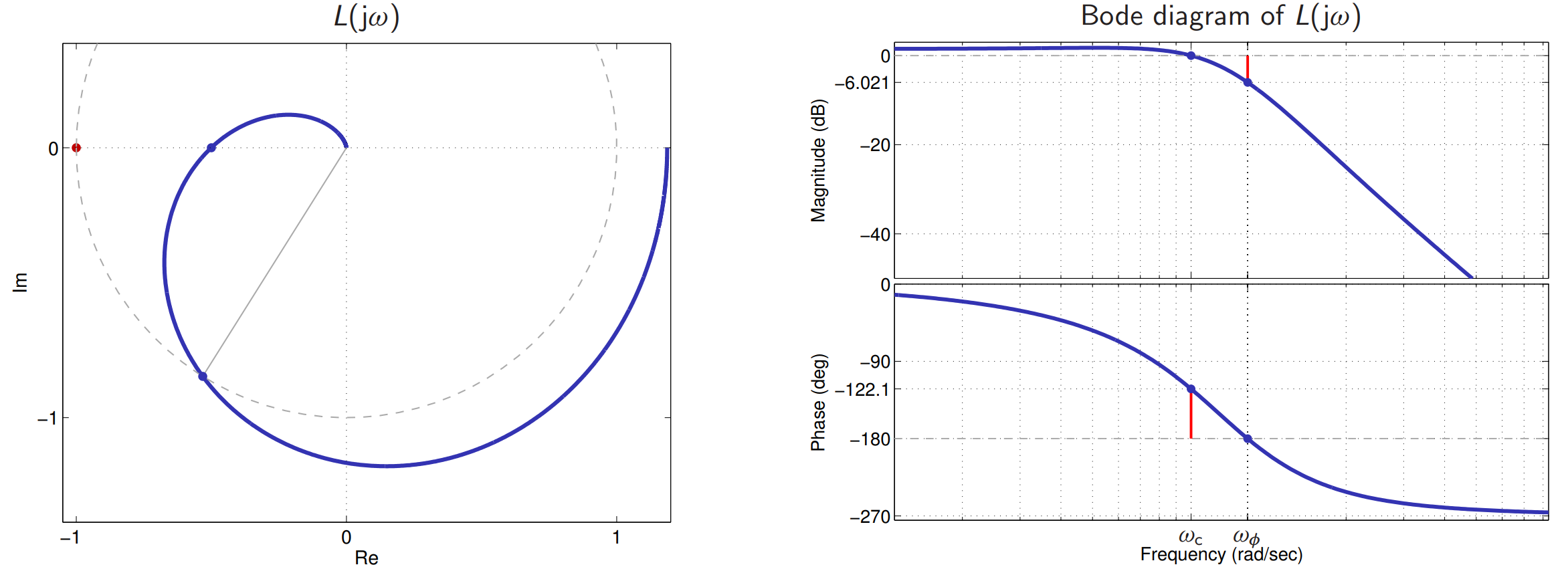
מציאת עודף הגבר ועודף פאזה בדיאגרמות בודה ונייקוויסט. (Leonid Mirkin’s Homepage, n.d.).
נסכם:
לפיכך, כאשר אנו דורשים שעקום נייקוויסט יהיה “רחוק מהנקודה הקריטית”, אנו למעשה מקיימים את הדרישה שעודפי היציבות יהיו יחסית גדולים.
השהייה
נזכור ממערכות לינאריות שמערכת השהייה היא מהצורה:
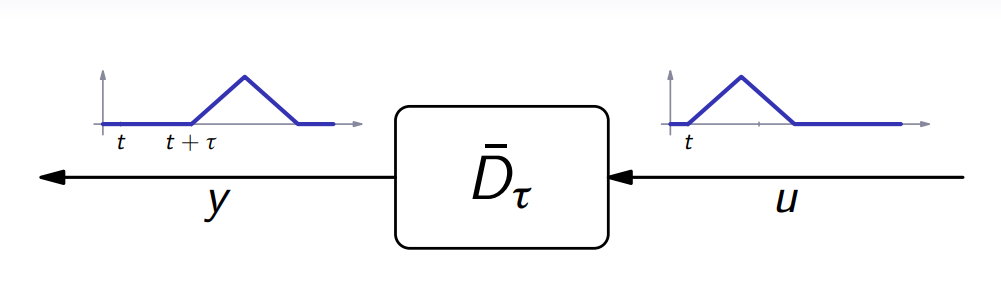
הקשר המתמטי:
מערכת זו:
- לינארית, כי:
- לא קבועה בזמן, כי:
- יציבה BIBO, כי:
לפי התמרת לפלס, פונקציית התמסורת של ההשהיה היא:
פונקציית תמסורת זו אי-רציונלית, ולכן אנו אומרים ש-
מבחינת גרף בודה, היא תיראה מהצורה:
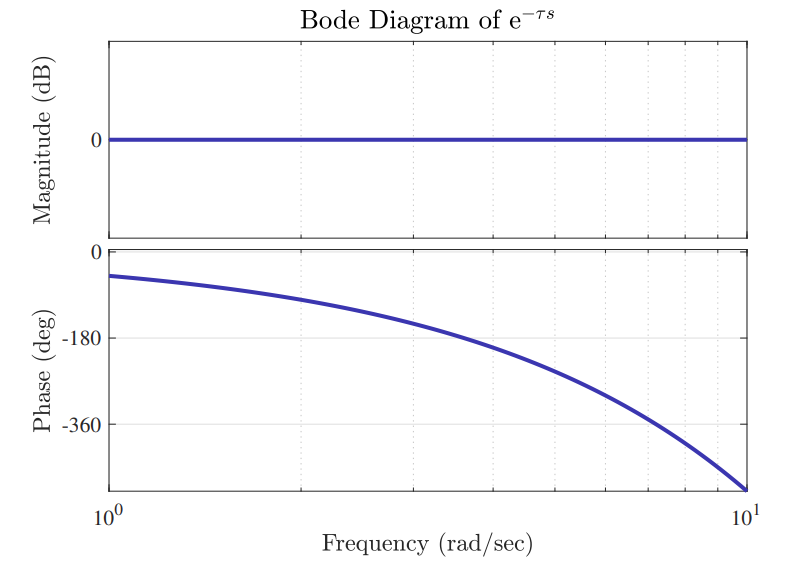
גרף בודה של
. (Leonid Mirkin’s Homepage, n.d.).
נשים לב של-
מערכות בזמן מת
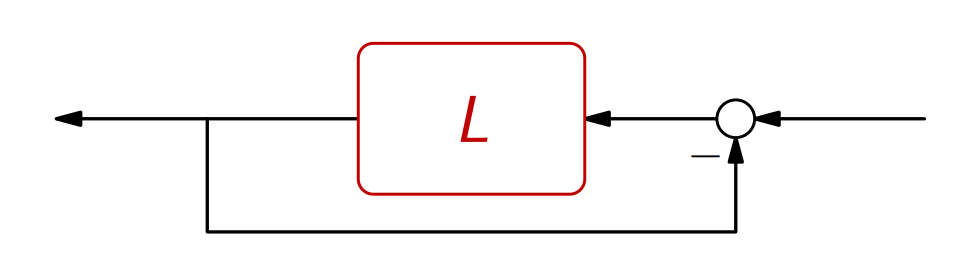
להלן מערכת בחוג סגור עם השהייה:
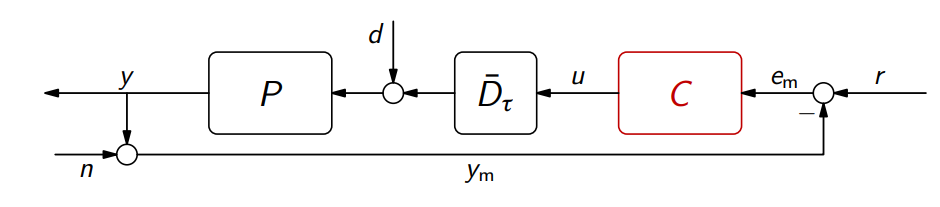
למערכות כאלו אנו קוראים מערכות בזמן מת.
בהנחה ו-
לפולינום אופייני זה יש אינסוף שורשים (נקרא גם קוואזי-פולינומי).
דוגמה:
אם
ו- , אז: לפולינום זה יש שורשים ב:
לכל
.
נשווה בין המקרה ללא השהייה והמקרה עם השהייה. בכללי, נקבל אין סוף שורשים:
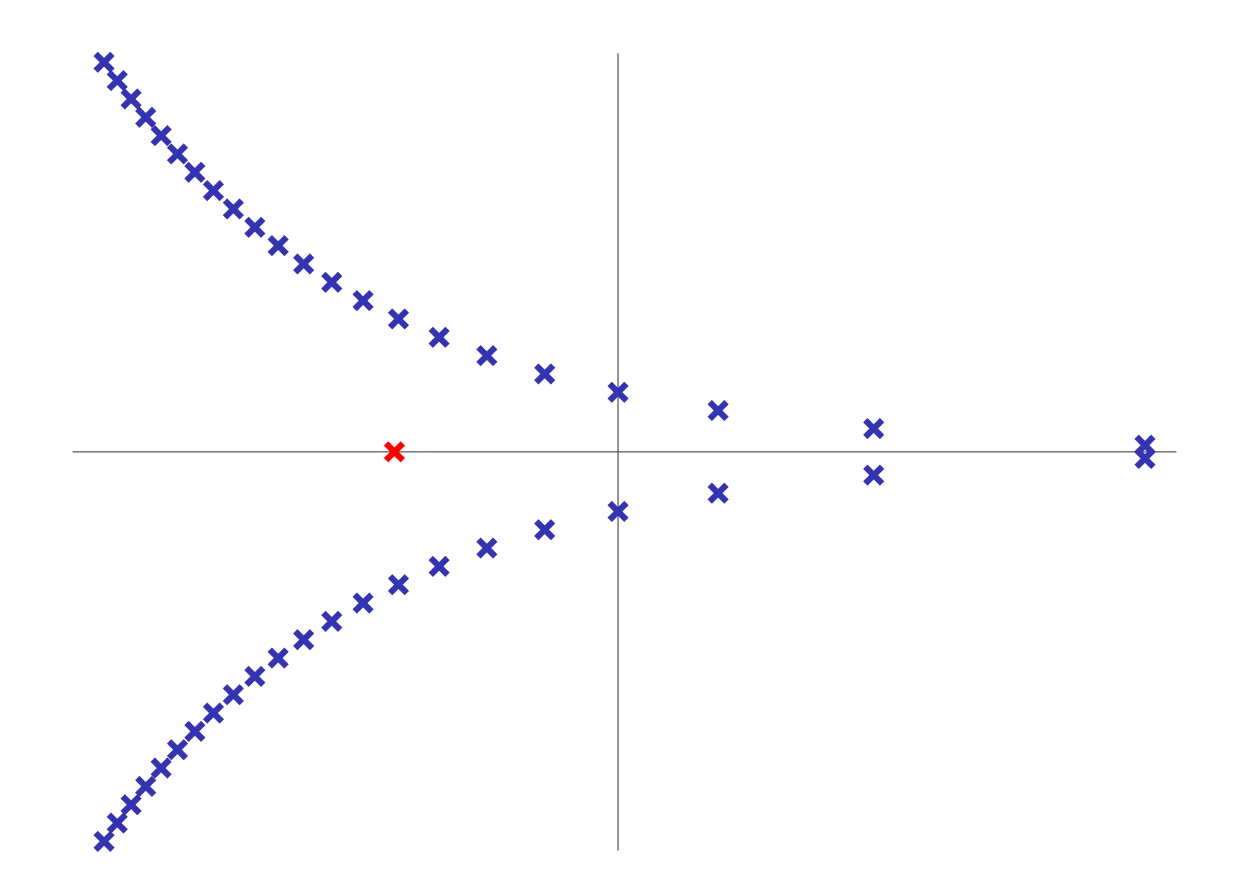
מיקומי שורשים של פולינום עם השהייה (
) ובלי השהייה ( ). (Leonid Mirkin’s Homepage, n.d.).
ניתן לראות מהגרף שההוספה של השהייה מסבכת משמעותית את ניתוח היציבות של המערכת.
השפעת השהייה על פונקציית החוג הפתוח
יהי
במקרה זה:
לכן:
במילים אחרות, השהיה במקרה זה:
- לא משנה את ההגבר של
- מוסיפה פיגור בפאזה הפרופורציונית ל-
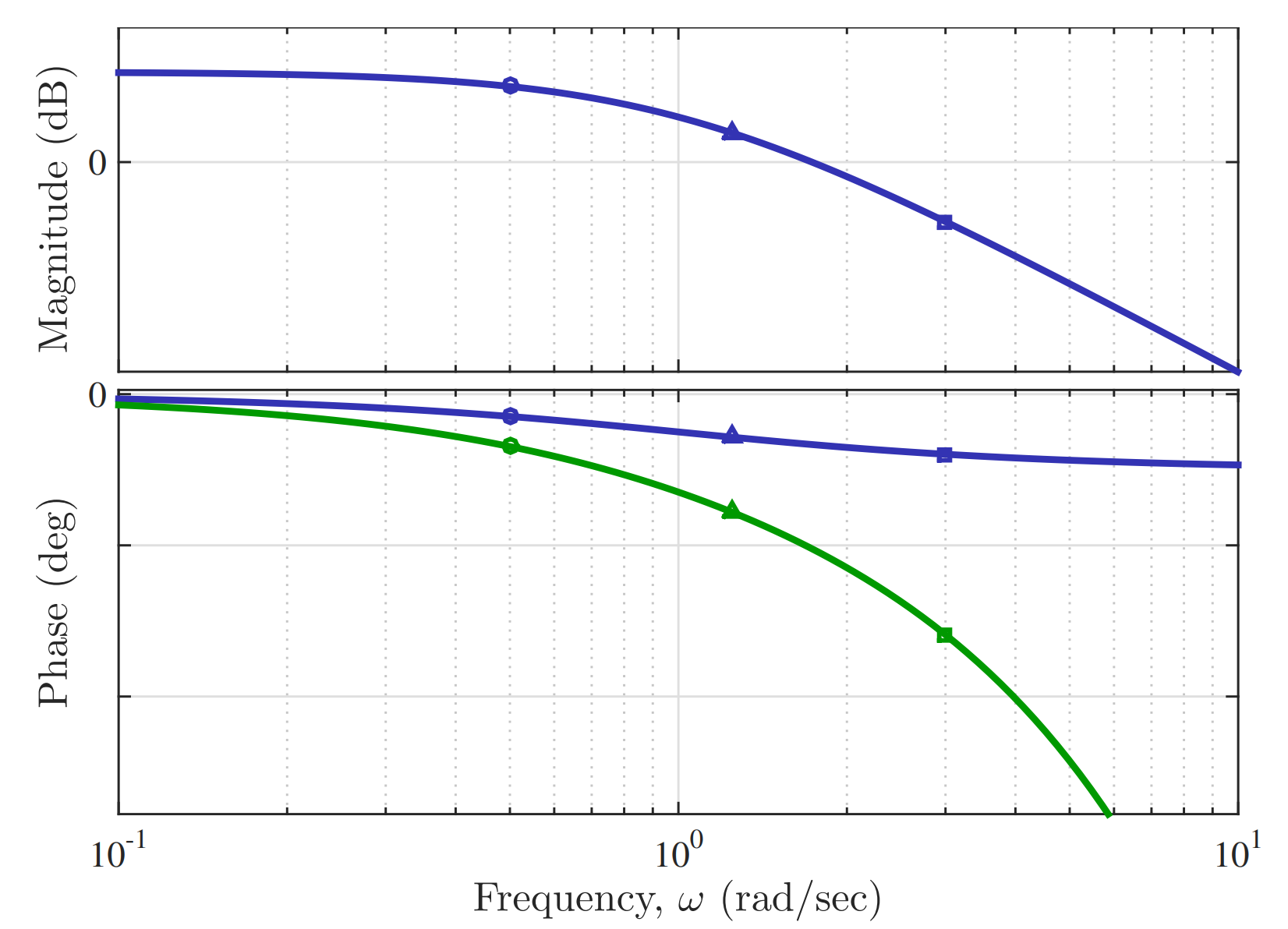
השפעת השהייה על דיאגרמת בודה של פונקציית החוג הפתוח. (Leonid Mirkin’s Homepage, n.d.).
השפעת השהייה על דיאגרמה פולארית של פונקציית החוג הפתוח. (Leonid Mirkin’s Homepage, n.d.).
קריטריון נייקוויסט למערכות בזמן מת
ההוספה של השהיה לא משנה משמעותית את קריטריון נייקוויסט עצמו, אלא רק את הגרף הפולארי של המערכת אותה אנו חוקרים. אנו יכולים לומר זאת כי:
- גם
- אם
דוגמה:
יהי
. אז:
עודף זמן מת
ראינו שבגלל צורה ההשפעה של השהיה על מערכת, נוכל אולי להיעזר ה-
כך ש:
כלומר, לשתי פונקציות התמסורת אותו עודף פאזה
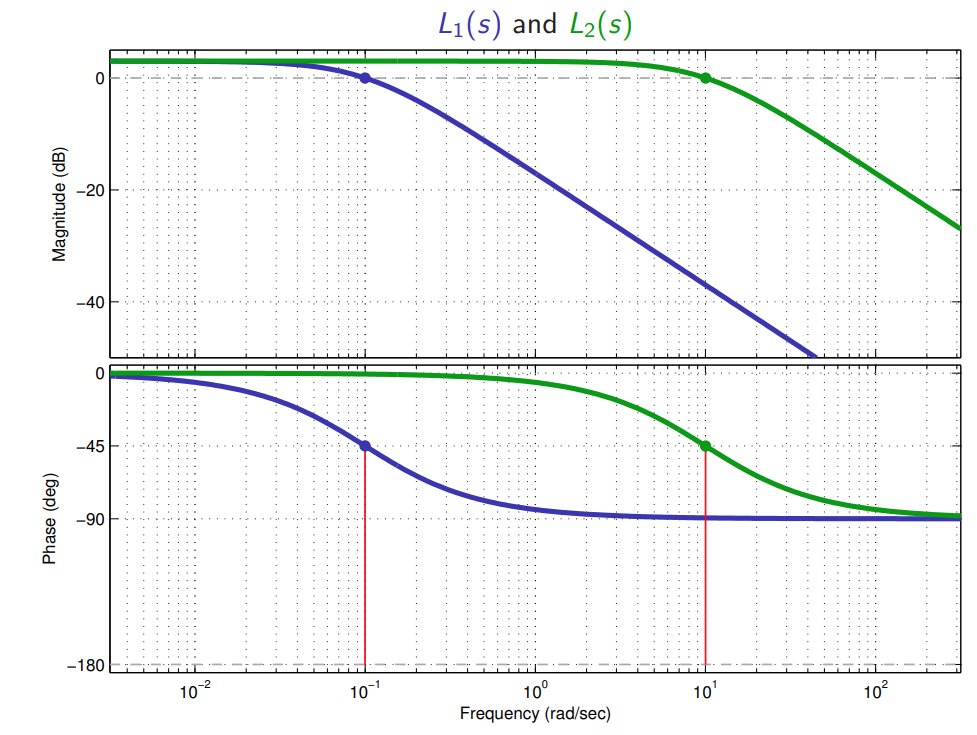
דיאגרמת בודה של
ו- . (Leonid Mirkin’s Homepage, n.d.).
הגרפים הפולאריים של שתי פונקציות אלו מתלכדים:
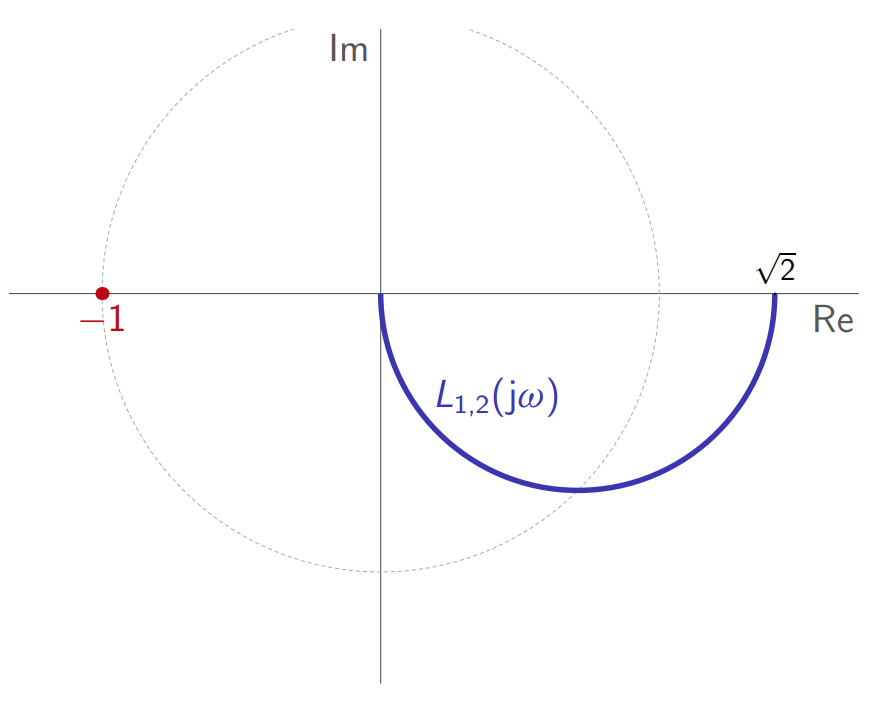
גרפים פולאריים של
ו- . (Leonid Mirkin’s Homepage, n.d.).
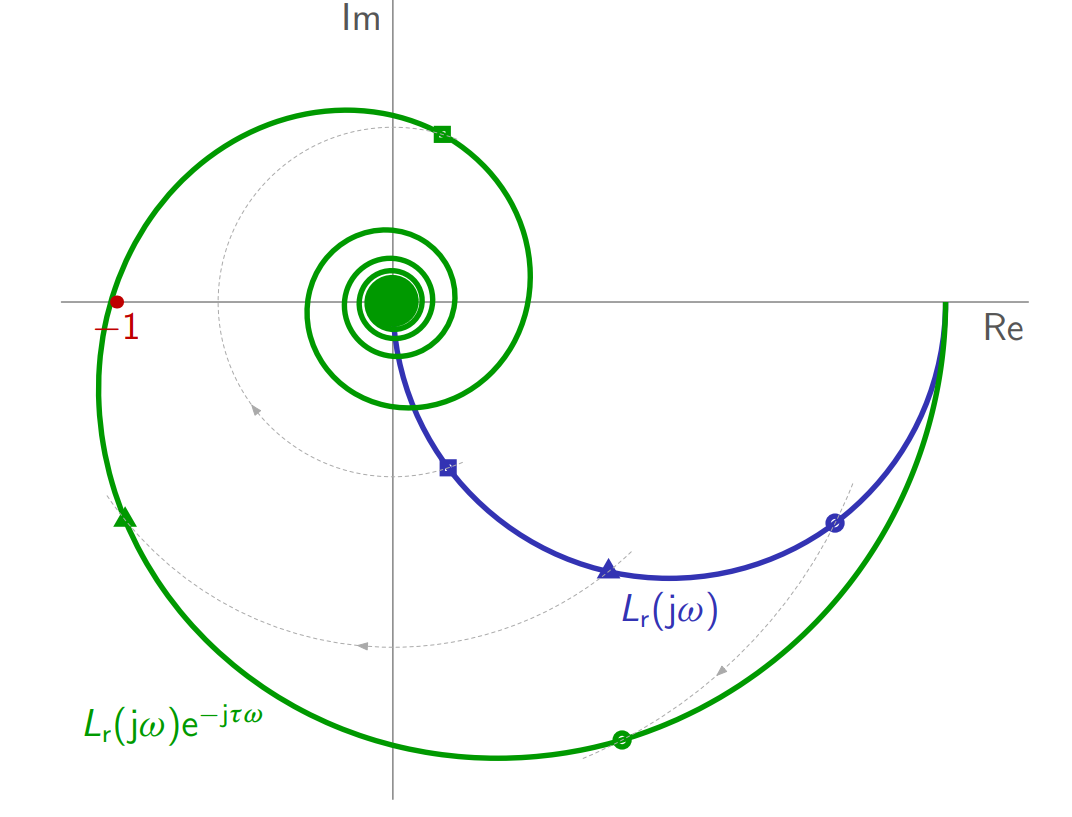
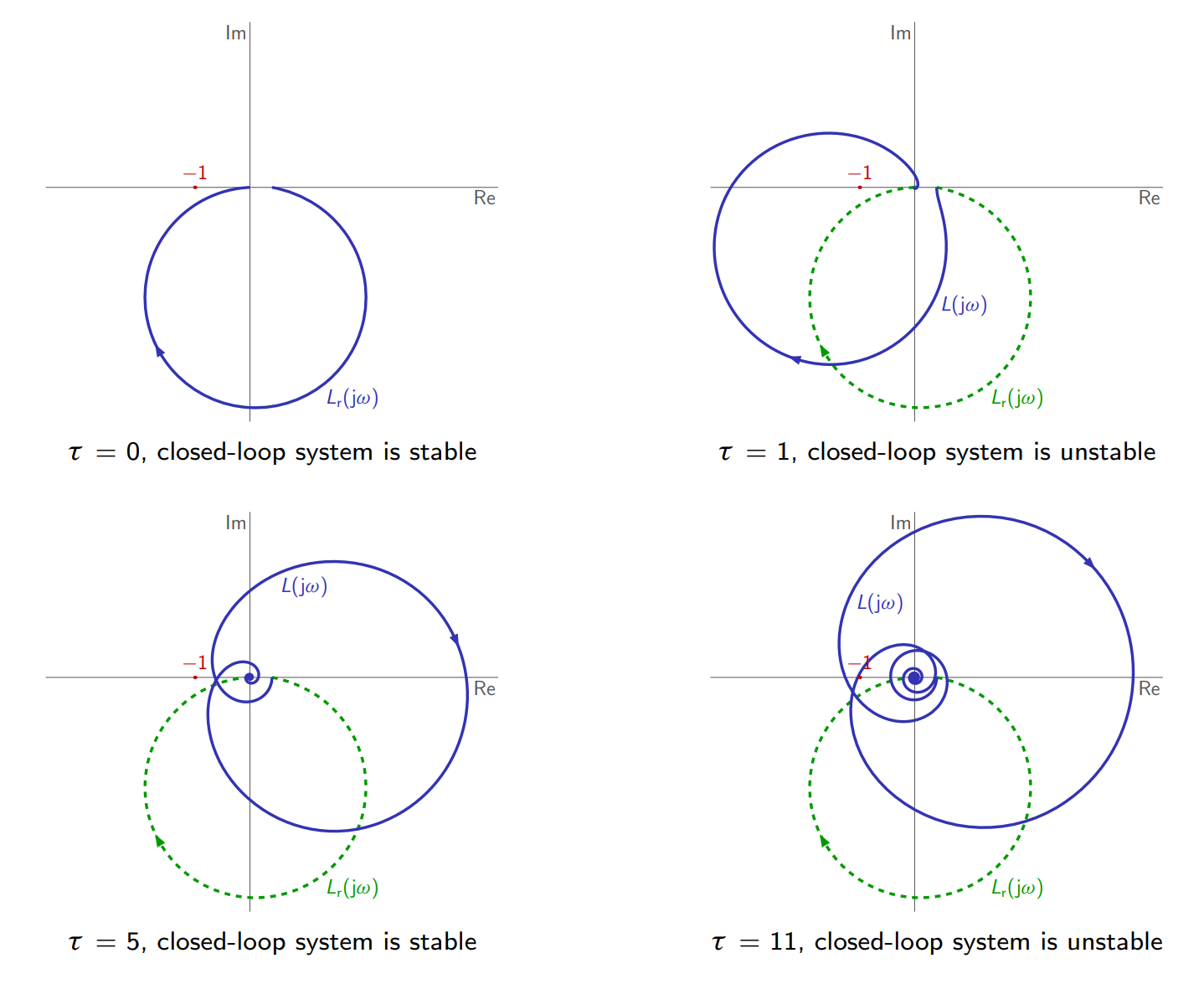
אבל, כאשר נוסיף השהייה ב-
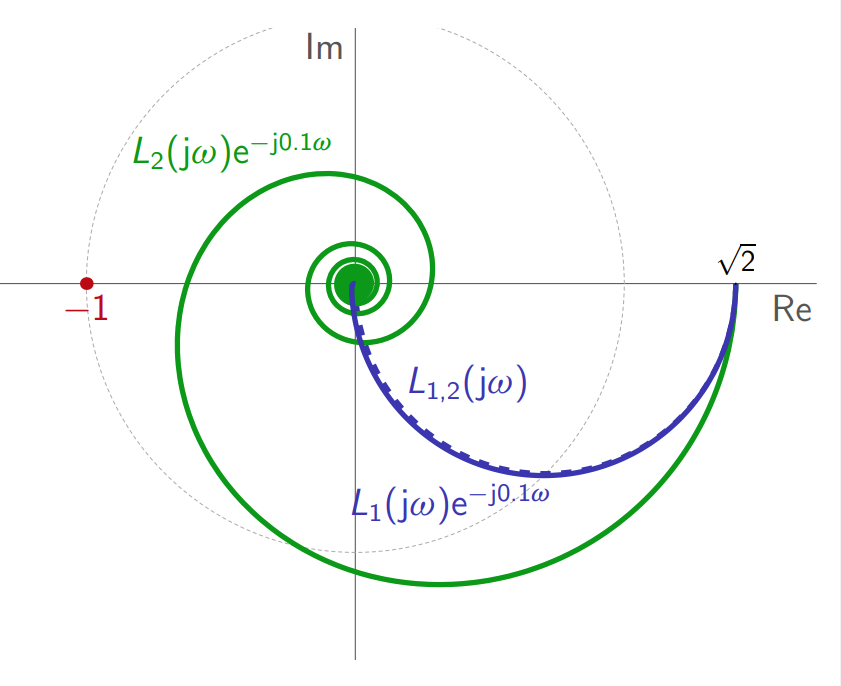
גרפים פולאריים של
ו- . (Leonid Mirkin’s Homepage, n.d.).
לכן, ל-
הגדרה: עודף זמן מת
עודף זמן מת
הוא ההשהיה המינימלית שתגרום לחוג הסגור להפוך להיות לא יציב.
חישוב עודף זמן מת:
נניח כי:
- המערכת בחוג סגור יציבה.
- ל-
- מתקיים
אם השהיה, נגיד
המערכת נהיית לא יציבה עבור
כאשר
שוויון זה מעיד על כך שככל שתדירות המעבר
תרגילים
כללי אצבע:
- עודפי יציבות הן מדד סטנדרטי בתעשייה, אך המדד לא מייצג תמיד.
- מספרים אופייניים לעודפי הגבר, פאזה, וזמן מת:
תרגיל 1
הגרף הבא מציג את הדיאגרמת בודה של המערכת:
עבור
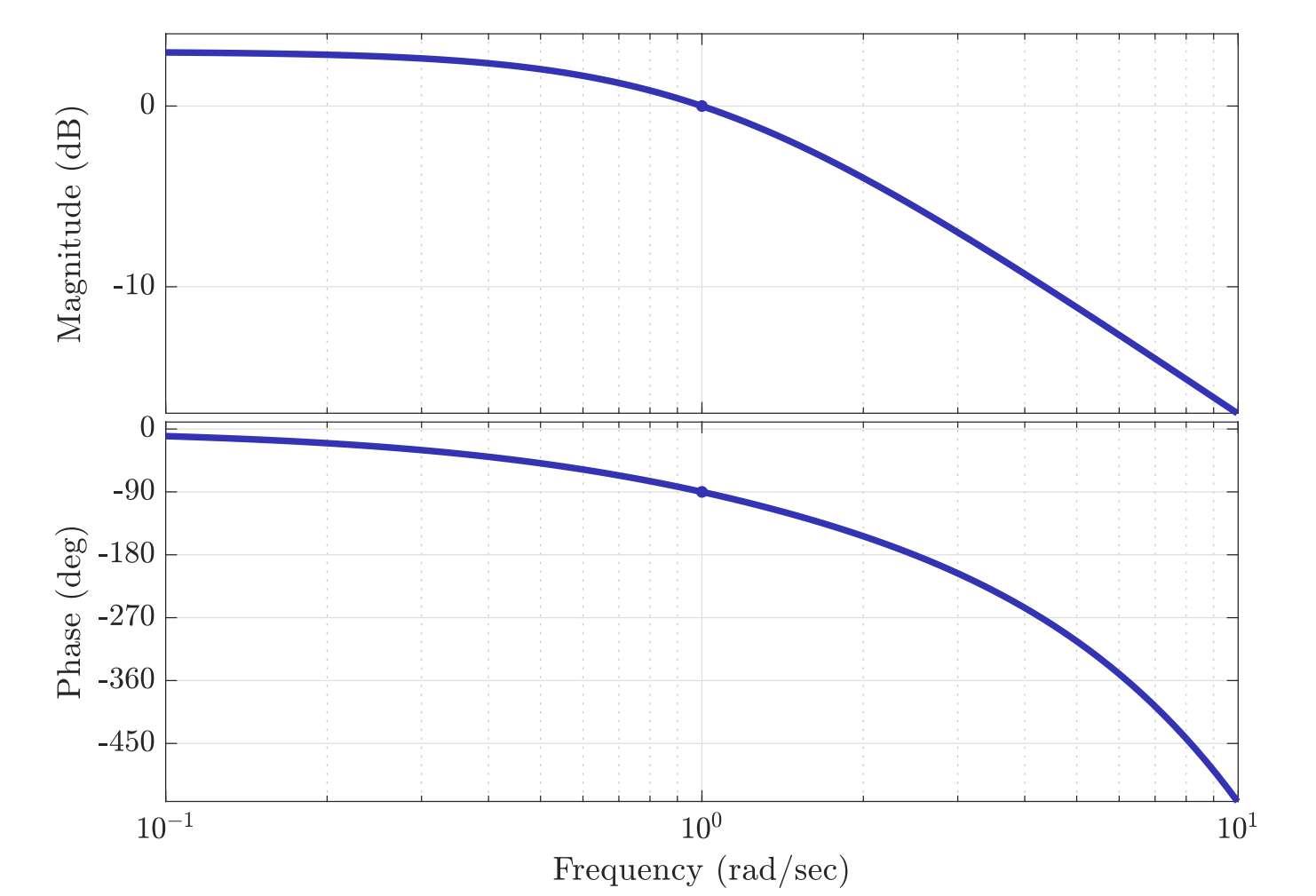
דיאגרמת בודה של
. (Leonid Mirkin’s Homepage, n.d.).
מצאו את ההגבר
פתרון:
כדי לחשב הגבר סטטי נוכל להציב
אבל, מצוין בפירוש על הגרף מהו ההגבר. לכן, נסתכל על הנקודה המודגשת עבור
לפי המערכת הנתונה:
לכן:
נשווה ונקבל:
תרגיל 2
נביט במשוואת החום החד ממדית:
כאשר
נסמן גם:
סעיף א’
בהנחה ו-
פתרון:
נוכל להפוך את המד”ח למד”ר ע”י התמרת לפלס:
זוהי מד”ר, שפתרונה הוא מהצורה:
מהצבת תנאי שפה
הערה:
משיקולי אנרגיה יוצא ש-
- משהו שנובע ממשהו שנקרא זהות פרסבל או משהו כזה. משהו.
נקבל שפונקציית התמסורת היא:
כאשר
נשים לב ש-
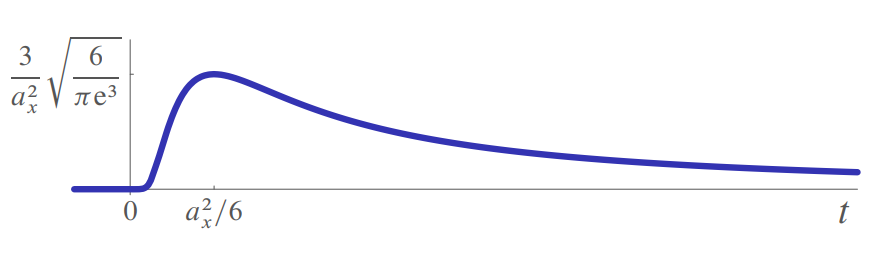
פונקציית התמסורת במישור הזמן
. (Leonid Mirkin’s Homepage, n.d.).
ניתן להראות שפונקציה זו מקיימת
סעיף ב’
בנו את דיאגרמות בודה והדיאגרמות הפולאריות של המערכת.
פתרון:
נשים לב ש:
בנוסף, ניתן להראות ש-
כלומר:
נקבל את הגרפים:
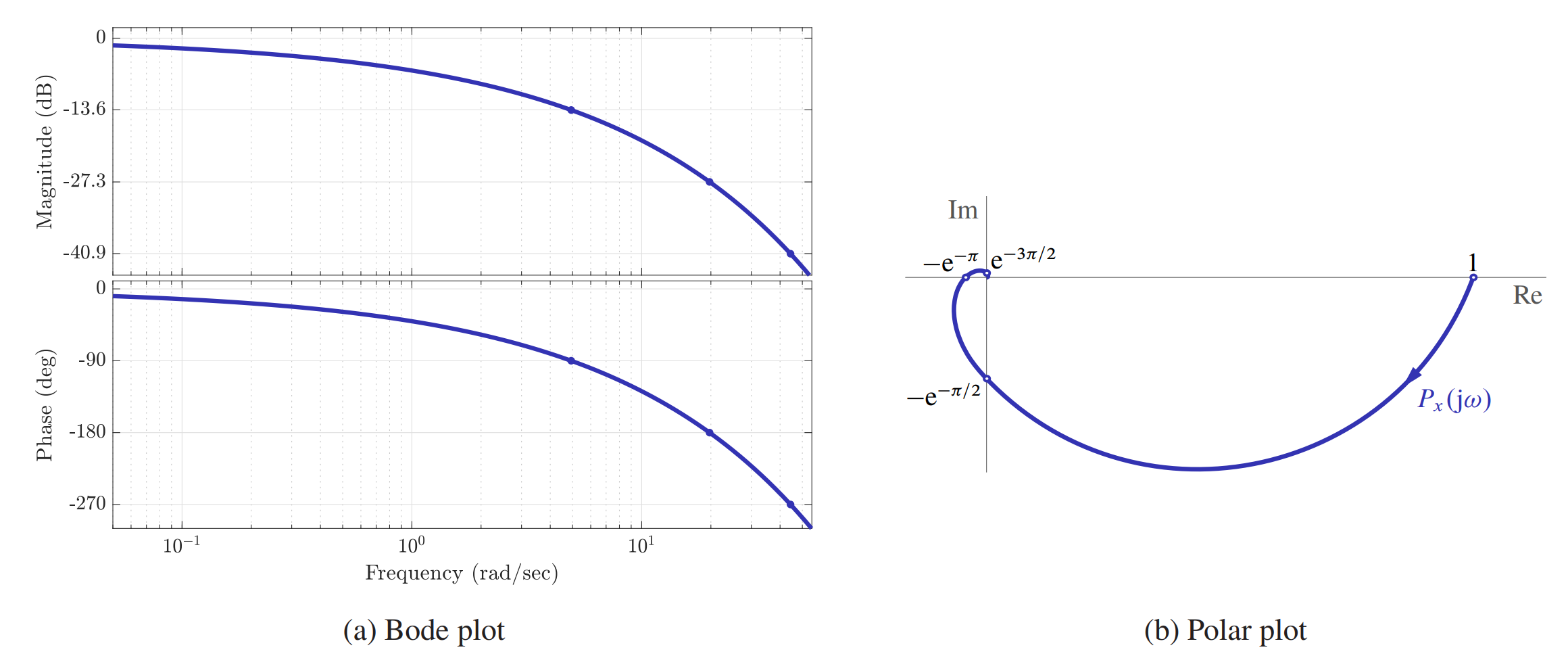
דיאגרמות בודה ופולארית ל-
. (Leonid Mirkin’s Homepage, n.d.).
סעיף ג’
נניח והמערכת לא מבוקרת ע”י משוב יחידה פרופורציוני
- תחת אלו
- מהו הגבול העליון על התדירויות מעבר תחת
- מהו הגבול התחתון השגיאה במצב מתמיד?
- מהו עודפי היציבות לחוג זה כפונקציה של
פתרון:
ה-
לכן, המערכת יציבה עבור:
מבחינת תדר המעבר, אנו יודעים שהוא מקיים
לכן נקבל תדרי המעבר תחת
מבחינת השגיאה, נזכור ש:
במצב מתמיד, בהנחה ו-
לכן:
לכן המינימלי:
עבור
מבחינת העודף פאזה, עבור
הפאזה בתדר זה:
לכן:
נשים לב שתדר מעבר קיים רק אם
עבור
מבחינת עודף זמן מת, לפי הנוסחה:
נקבל:
סעיף ד’
בהנחה והמערכת מבוקרת ע”י בקר I:
פתרון:
המערכת החדשה:
לכן:
נרצה לבדוק מתי
בתדר זה:
נדרוש:
שזה אומר:
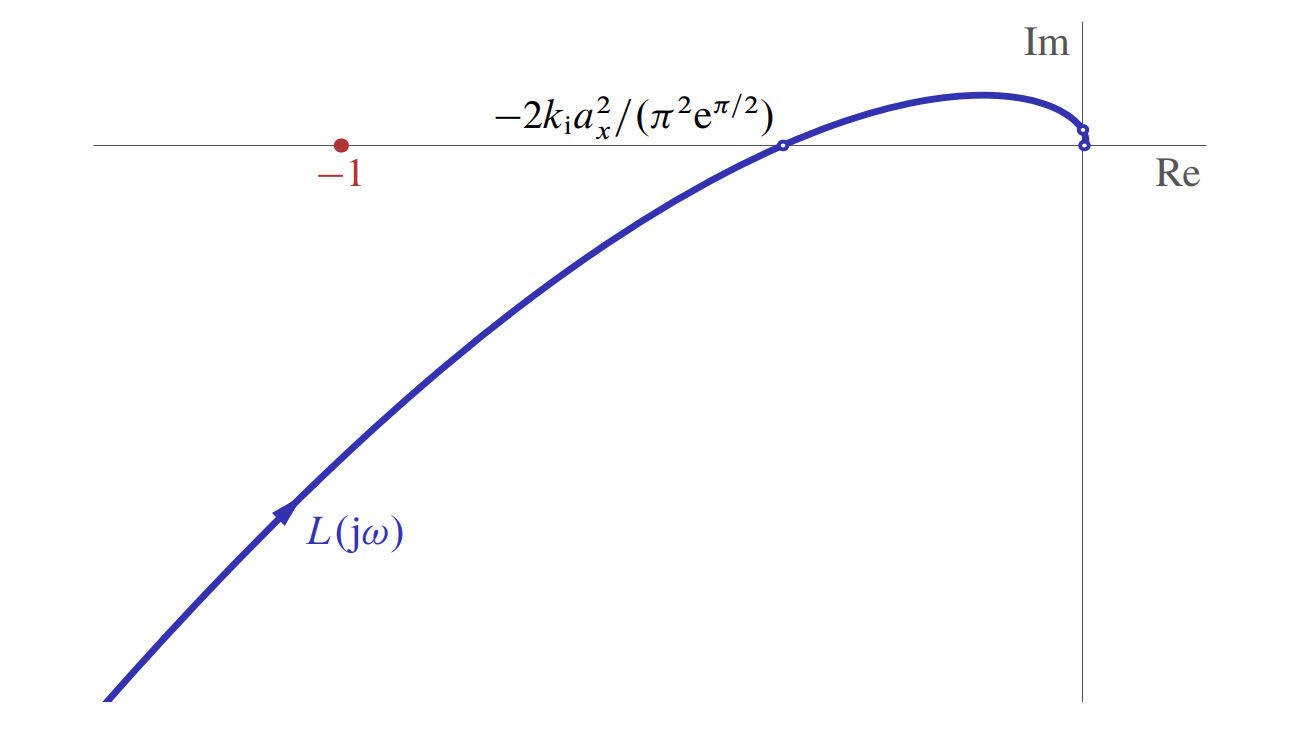
גרף פולארי של
. (Leonid Mirkin’s Homepage, n.d.).