מבוא
בפרק זה נעסוק בגאומטריית תמסורות (גג”שים), הקשרים הקינמטיים ביניהם, והכוחות המועברים ביניהם ע”י ארבעה סוגי תמסורות שונים: חלזונית, ישרה, משופעת, קונית. הכוחות המועברים בין תמסורות משולבות מעבירות מומנטי פיתול לגלים לתנועה ותמסורת הספק, ויוצרים כוחות ומומנטים המשפיעים על הגלים והמסבים שלו.
סוגי תמסורות
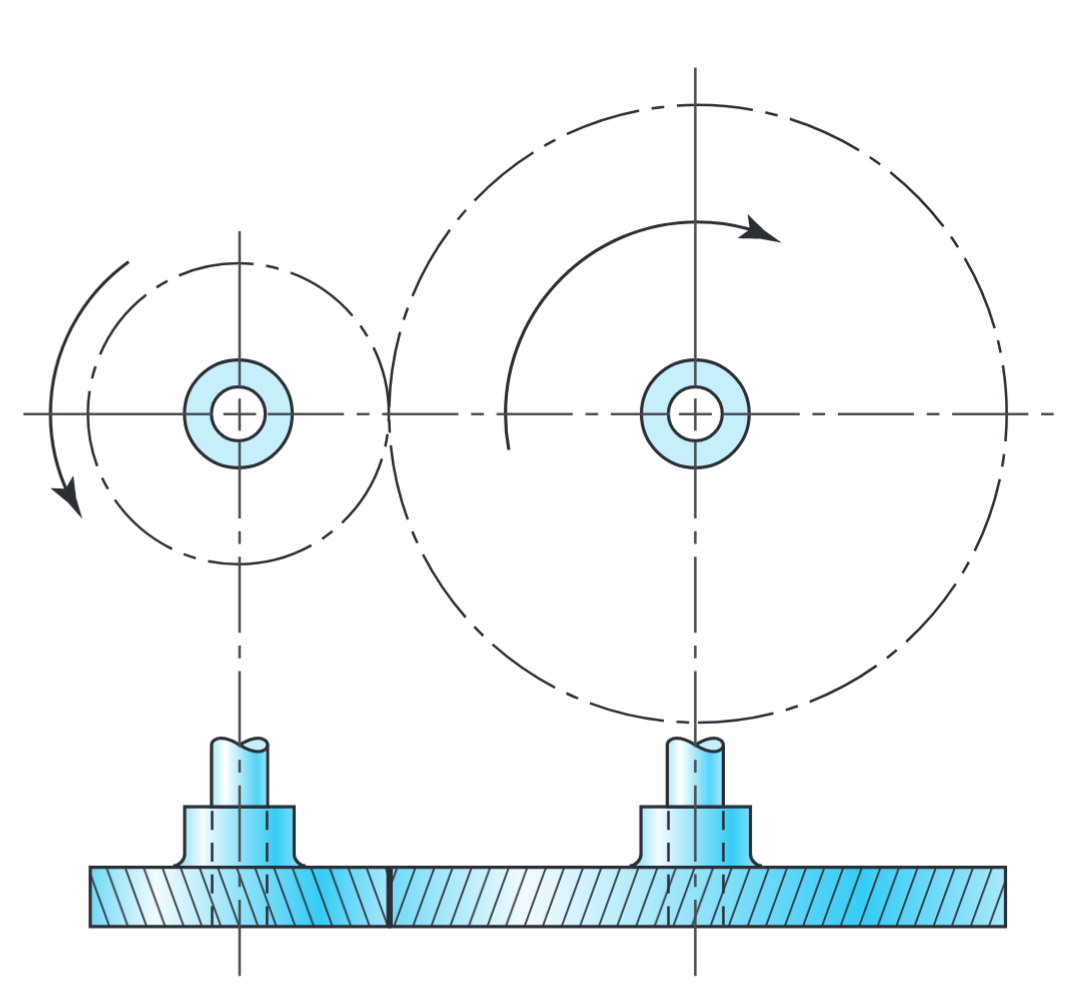
לתמסורת ישרה (spur gear) יש שיניים מקבילות לציר הסיבוב והן מוסרות תנועה מגל אחד לגל אחר המקביל לו. מכל הסוגים השונים של תמסורות, הוא הכי פשוט, וניעזר בו כדי לפתח את הקשרים הקינמטיים.

תמסורת ישרה מעבירה תנועה סיבובית בין גלים מקבילים. (Budynas et al., 2015).
לתמסורת משופעת (helical gears) יש שניים בזווית לציר הסיבוב. מטרתה זהה לזו של תמסורת ישרה, והן פחות רועשות בגלל מגע יותר מתון בין השיניים. השיניים המשופעות גם מפתחות עומסים לאורכם ומומנטי כפיפה, שלא קיימים בתמסורת ישרה. לפעמים משתמשים בתמסורות משופעות לתמסורת תנועה בין גלים לא מקבילים.
תמסורת משופעת להעברת תנועה בין גלים מקבילים (וגם לא מקבילים). (Budynas et al., 2015).
לתמסורות קוניות (bevel gears) יש שיניים שיוצרו על מישורים קוניים, ולרוב משומשים בתמסורת תנועה בין גלים החותכים אחד את השני. האיור הבא מתאר תמסורת קונית בשן ישרה, לעומת תמסורת קונית ספירלית הנחתכת כך שהשן כבר לא ישרה, אלא יוצרת קשת מעגלית.
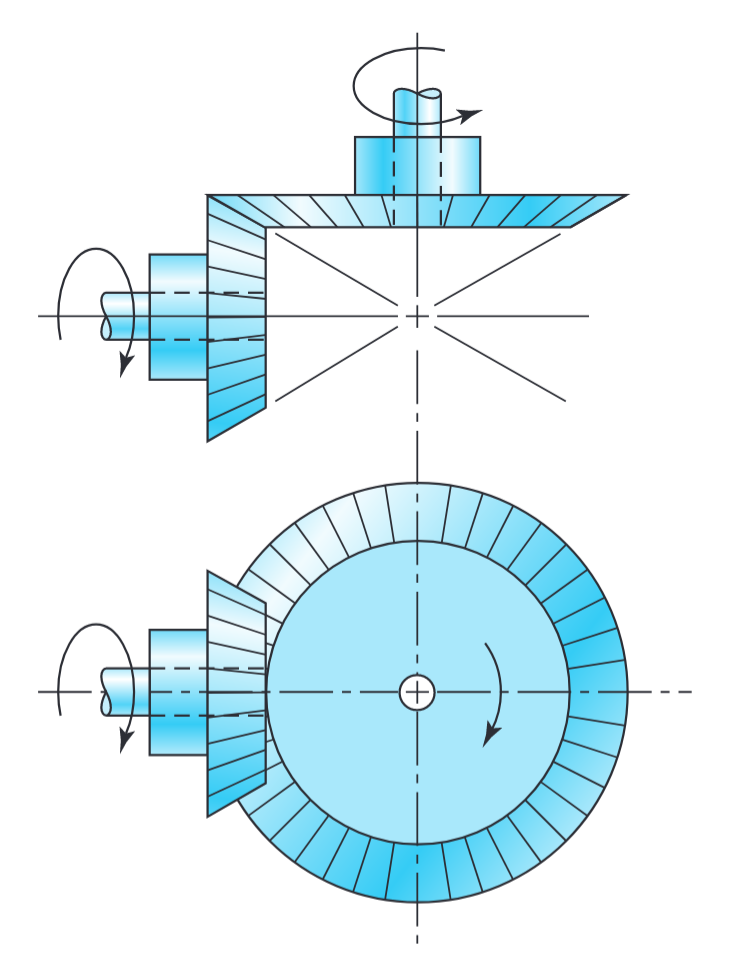
תמסורות קוניות מעבירות תנועה סיבובית בין גלים נחתכים. (Budynas et al., 2015).
תמסורות חלזוניות (worm gears), כפי שמוצג באיור הבא, הן למעשה בורג. הכיוון של סיבוב הבורג החלזוני תלוי באם הוא נחתך לפי כלל יד ימין או שמאל. התמסורת החלזונית גם מיוצרת כך שהשן של אחת מהגג”שים, או שניהם, משולבת עם השנייה.
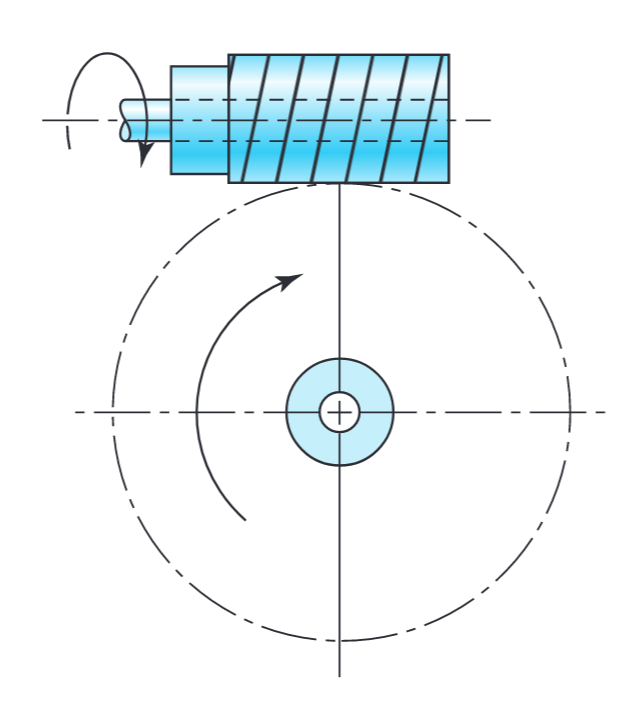
השימוש של תמסורת חלזונית להעברת תנועה סיבובית בין גלים שלא מקבילים או חותכים אחד את השני. (Budynas et al., 2015).
מערכת גג”ש
באיור הבא מוצגת מערכת גג”ש (gear train), נניח שגג”ש
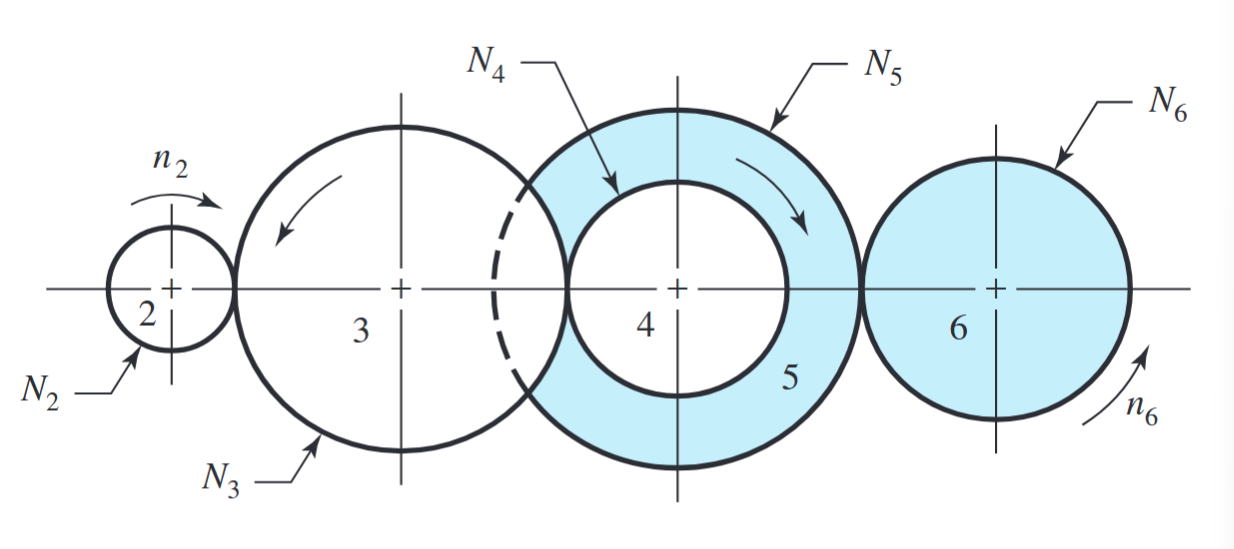
מערכת גג”ש. (Budynas et al., 2015).
המהירות של הגג”ש המונע היא:
כאשר
משוואה זו תקפה לכל סוג תמסורת. הערך המוחלט מעיד על כך שאין תלוי באם כיוון הסיבוב הוא חיובי או שלילי. במקרה של תמסורות ישרות ומשופעות, סימן הכיוונים לרוב מוחלט לפי כלל יד ימין - חיובי נגד כיוון השעון, ושלילי עם כיוון השעון. כאשר מדובר בתמסורות קוניות או חלזוניות, כיווני הסיבוב טיפה יותר קשים לקביעה, אבל לא ניכנס לזה בקורס.
במערכת גג”ש המוצגת לעיל ישנם 5 גג”שים. בהנחה וגג”ש
עבור זוג גג”שים בו אחד מניע את השני, אנו קוראים לגג”ש המניע פיניון (pinion), ולגג”ש המונע גיר (gear).
הערה:
בקורס נתייחס לתמסורות מפחיתות ולכן הגג”ש המניע הינו הגג”ש הקטן - ה-pinion.
נשים לב שגג”ש

מבט על הגג”ש.
הצורה היחידה שבה הבטלן
במערכת שלנו, גג”שים
נגדיר את המקדם של
כעת נוכל לרשום:
כאשר
כלל אצבע כללי הוא לבחור train value עד
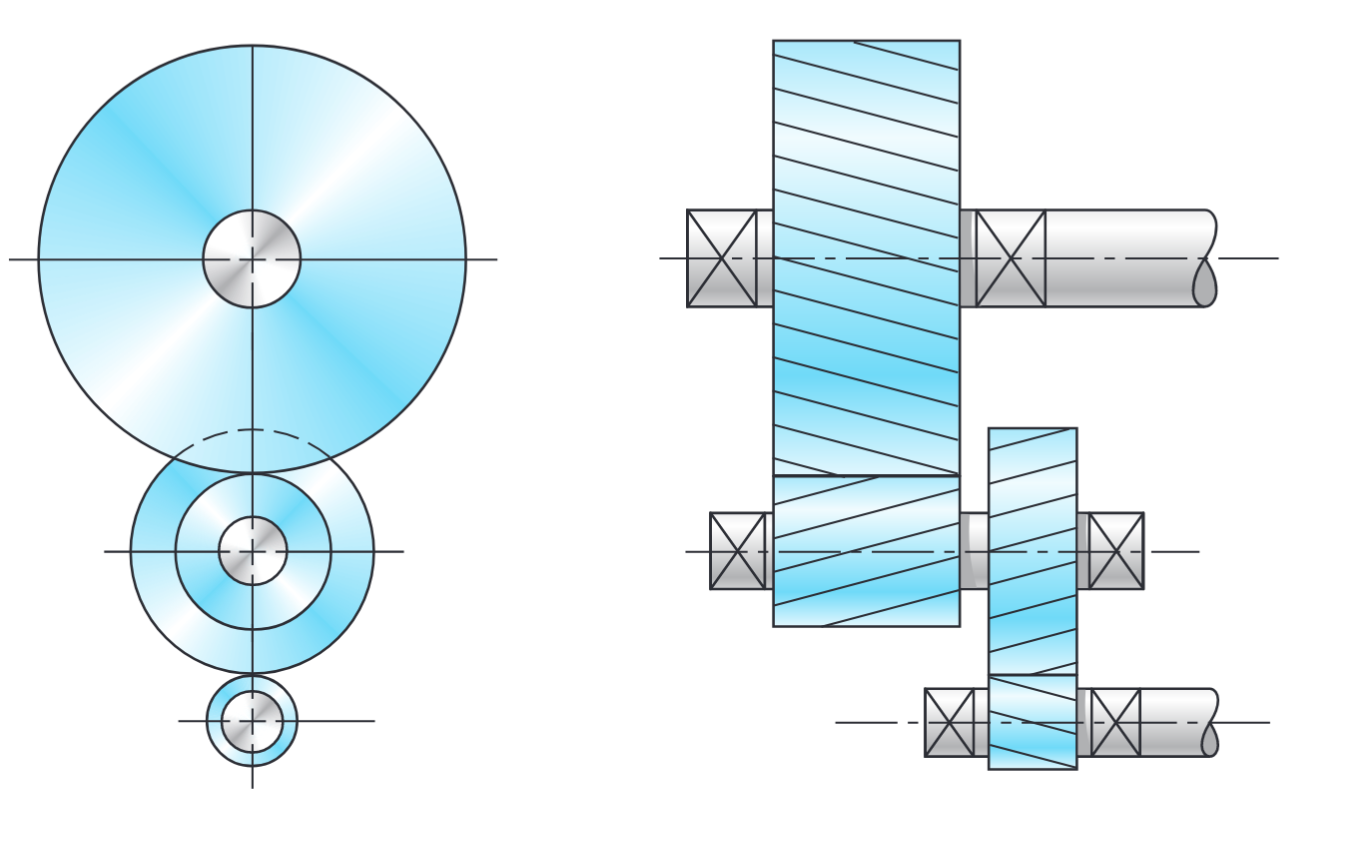
מערכת גג”ש דו-שלבית. (Budynas et al., 2015).
לפעמים גם נרצה שהגל כניסה וגל יציאה יחוברו באותו הקו, כפי שמוצג באיור הבא, לקבלת מערכת גג”ש בתשלובת הפוכה (compound reverted gear train):
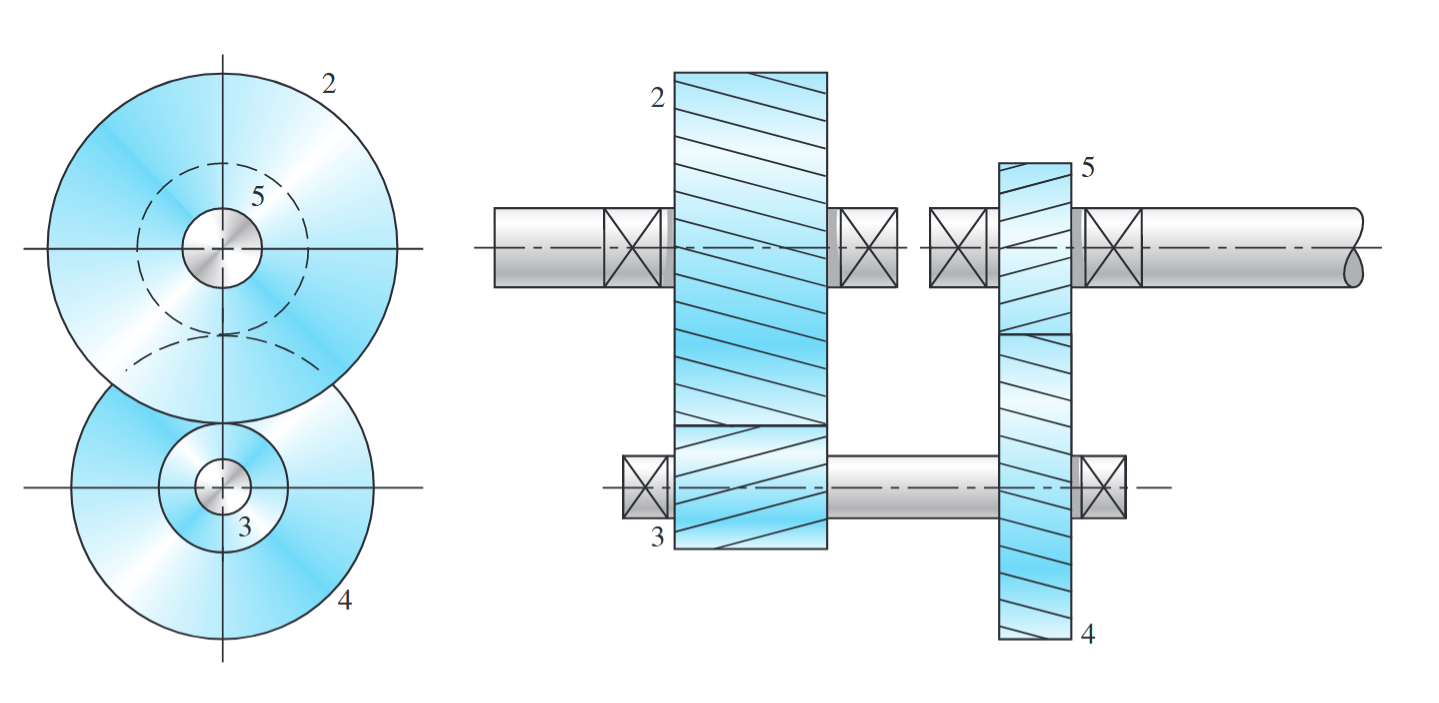
מערכת גג”ש בתשלובת הפוכה. (Budynas et al., 2015).
מערכת זו דורשת שהמרחקים בין הגלים יהיו זהים עבור שני שלבי המערכת, שמוסיף על מורכבות התכן. אילוץ זה הוא:
נוכל לתרגם את תנאי זה לתנאי על מספר השיניים - אם המודול זהה בין הגג”שים:
תמסורת פלנטרית
אם מאפשרים לחלק מצירי הגג”שים להסתובב סביב צירים אחרים, מקבלים מערכת גג”ש הנקראת תמסורת פלנטרית. תמסורות פלנטריות כוללות גג”ש שמש (sun gear), זרוע פלנטרית (planet carrier), ואחד או יותר גג”ש לווין (planet gear).
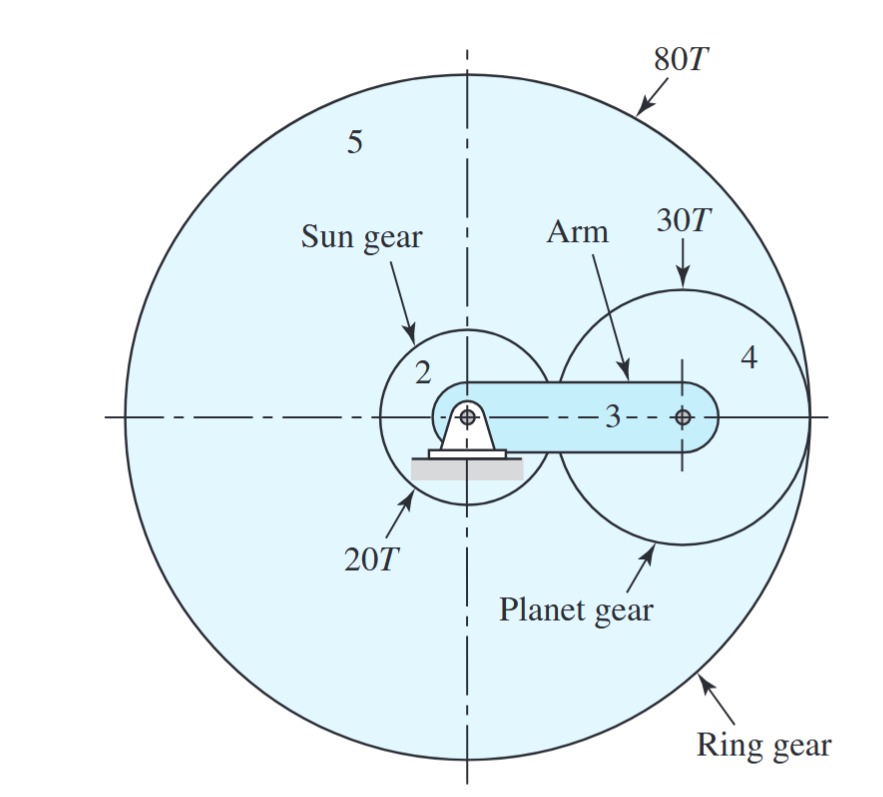
מערכת גג”ש פלנטרית. (Budynas et al., 2015).
תמסורות פלנטריות הן מכניזמים יוצאי דופן כי יש להם שתי דרגות חופש; כלומר, לתנועה מאולצת, המערכת צריכה לקבל שני קלטים. באיור לעיל שני הקלטים האלו יכולים להיות התנועה של שתי אלמנטים כלשהם במערכת. נוכל להגדיר למשל שגג”ש השמש יסתובב ב-
האיור הבא מראה תמסורת פלנטרית המורכבת מגג”ש שמש
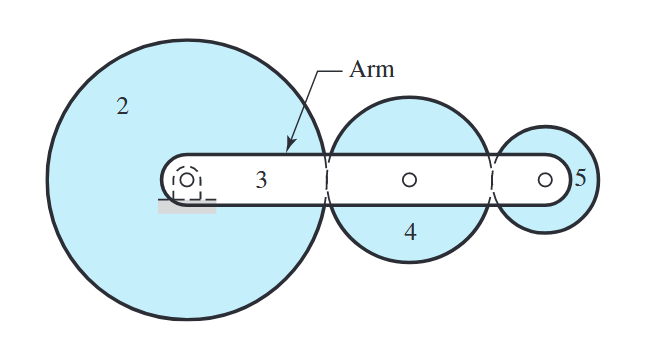
מערכת גג”ש על הזרוע של תמסורת פלנטרית. (Budynas et al., 2015).
המהירות הזוויתית של גג”ש
בנוסף, המהירות הזוויתית של
אם נחלק את שתי המשוואות נקבל:
משוואה זו מתארת את היחס בין גג”ש
נוכל להיעזר בנוסחה זו כדי למצוא את התנועה המתקבלת לכל תמסורת פלנטרית. בכללי:
כאשר:
- המהירות הזוויתית
- המהירות הזוויתית
- המהירות הזוויתית
מספר הלוויינים הוא למעשה מספר הזרועות בהם מועבר העומס. לכן, קיים הרצון להגדיל ככל האפשר את מספר הלוויינים, אבל אנו מוגבלים במקום על התמסורת. הטבלה הבאה מציגה את מספר הלוויינים המומלץ.
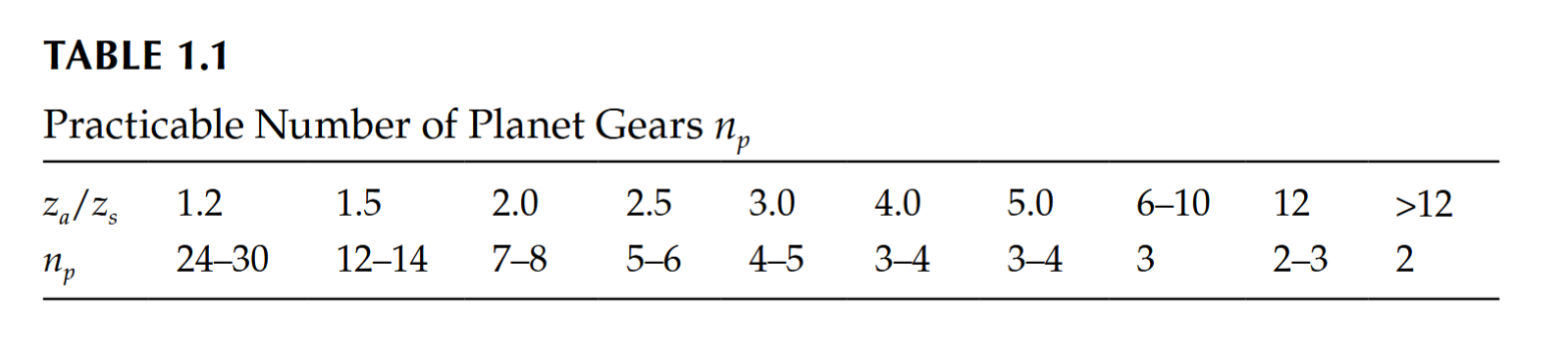
מספר הלוויינים המומלץ לפי יחס
( בטבלה). (Klebanov & Groper, 2016).
תרגילים
תרגיל 1
יש לתכנן תשלובת בעלת יחס תמסורת כולל של
הערה:
נניח זווית לחץ של
ולכן מספר שיניים מינימלי הוא . עבור זווית לחץ אחרת היינו מקבלים מספר שיניים מינימלי שונה. נושא זה יובהר בפרק הבא.
פתרון:
נבדוק שתי דרגות הפחתה:
נניח ששתי הדרגות ההפחתה זהות:
אם נניח שלושה דרגות הפחתה:
לכן נבחר תמסורת עם שלוש דרגות הפחתה.
יחס התמסורת שבחרנו הוא
קיבלנו מספר שיניים לא שלם עבור
לסיכום, נבחר בתמסורת המכילה שלושה דרגות הפחתה עם גלגלי שיניים ומספר שיניים כלהלן:
נקבל שיחס התמסורת הוא:
שזה סטייה של
אם נרצה פתרון מדויק, נוכל לבחור דרגות הפחתה עם יחס תמסורת לא זהה:
ואת מספר השיניים נבחר בהתאם:
תרגיל 2
יש לתכנן תשלובת בעלת יחס תמסורת של
פתרון:
נבחר שתי דרגות הפחתה על מנת שכיוון הסיבוב של היציאה יהיה זהה לכניסה. נדרש גם יחס תמסורת של
מכאן נגיע לקשרים:
מאילוץ קו-אקסיליות על מספר השיניים:
נציב את הקשרים:
אם נבחר
איור להמחשה.
תרגיל 3
נתונה הממסרת הפלנטרית שבציור. דרוש למצוא את מהירות הסיבוב של הזר (הטבעת) כאשר מהירויות השמש והזרוע הן

סכמת התמסורת.
פתרון:
נסמן את גג”ש השמש ככניסה
נחשב את
נחשב את
נשווה את שני הביטויים ל-