מבוא
כפי שראינו, הרעיון המרכזי בשיטת האלמנטים הסופיים הוא לבחור קירוב סופי של הפתרון האמיתי ולנסח את הבעיה החלשה הבאה:
מציאת
כאשר
אנו מתייחסים ל-
הגדרה:
לכל פונקציה קבילה
, נגדיר את סמי-נורמת האנרגיה (energy semi-norm) כך:
אם תנאי השפה אינם מאפשרים תנועה קשיחה (כלומר,
אומדן שגיאה בשיטת האלמנטים הסופיים:
תחת הנחות די מתונות, ניתן להראות ש:
כאשר
הערה:
נציין כי קבוצת הפונקציות המוגדרות ע”י
עם אינה טכנית מרחב של פונקציות ויש לאפיין אותה כ”מגוון לינארי”. הדבר אינו מהווה בעיה לניתוח שיבוא.
הערה:
נציין כי
היא נורמה מכיוון ש:
- היא חיוביות:
כאשר, בהינתן ש- , אם ורק אם . - מתקיים אי-שוויון המשולש:
- ניתנת להכפלה בקבוע:
משפט “הקירוב הטוב ביותר”
פתרון שיטת האלמנטים הסופיים הוא האופטימלי ביותר מבחינת נורמת האנרגיה. כדי להוכיח זאת אנו משתמשים במשוואה (ZT4.1):
לכל
לכל
חיסור משוואה (ZT4.8) מ-(ZT4.7) (כאשר מציבים
לכל
נבחר כעת
כאשר
מכיוון ש-
זהו משפט הקירוב הטוב ביותר, המראה שהקירוב
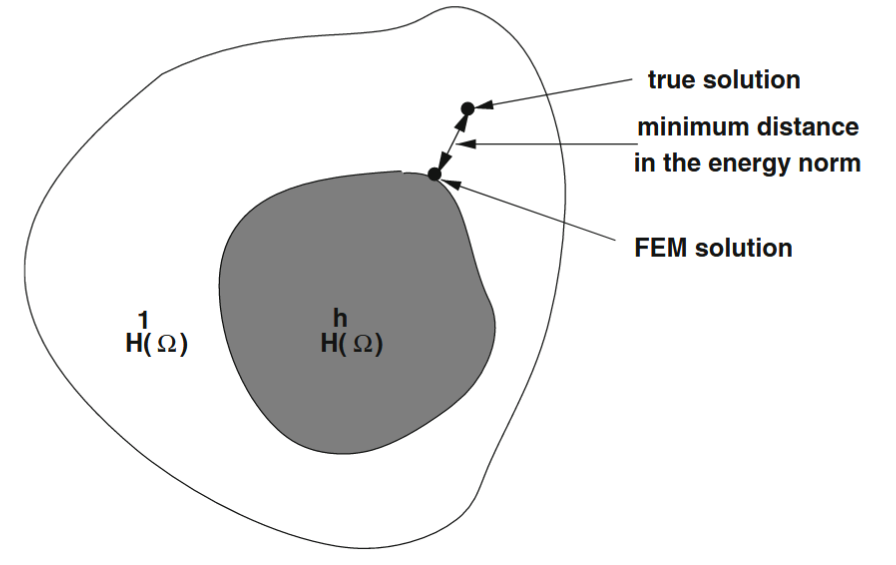
סכמה של משפט הקירוב הטוב ביותר. (Zohdi, 2018).
עקרון האנרגיה הפוטנציאלית המינימלית
עקרונות מינימום הם קבוצה של מושגים מועילים ביותר בפיזיקה. נראה כעת כיצד הם מתקשרים לשיטת האלמנטים הסופיים.
יהי
נארגן מחדש את הביטוי:
מכיוון שהפתרון האמיתי
כאשר הגדרנו את ה”פוטנציאל” באופן הבא:
מכיוון ש-
ביטוי זה ידוע כעקרון האנרגיה הפוטנציאלית המינימלית (Principle of Minimum Potential Energy - PMPE). במילים אחרות, הפתרון האמיתי
אומדנים פשוטים לרשתות FEM מתאימות
התוצאות שהצגנו בסעיפים הקודמים מאפשרות לנו לפתח אומדנים לגודל הרשת הנדרש כדי להשיג דיוק מסוים.
כפי שראינו במשוואה (ZT4.3), תחת הנחות סבירות, שגיאת הקירוב של שיטת האלמנטים הסופיים מוגבלת על ידי:
כאשר:
בנוסף, משילוב עם עקרון האנרגיה הפוטנציאלית המינימלית (משוואה (ZT4.15)) עבור
משוואה זו מספקת קשר ישיר בין שגיאת האנרגיה לבין הפרש האנרגיה הפוטנציאלית בין הפתרון המקורב לפתרון האמיתי.
חישוב קבוע השגיאה והערכת גודל הרשת
מכיוון שהפתרון האמיתי
בהינתן ש-
על ידי חיסור המשוואות זו מזו ופתרון עבור
לאחר שמצאנו את
לסיכום, תהליך הערכת גודל הרשת האופטימלי מורכב מהצעדים הבאים:
אלגוריתם: חישוב גודל רשת אופטימלי
-
פתרון על רשת גסה:
פתרו את הבעיה על רשת עם גודל אלמנט -
פתרון על רשת עדינה יותר:
פתרו את אותה בעיה על רשת עדינה יותר עם גודל אלמנט -
חישוב קבוע השגיאה והערכת גודל הרשת האופטימלי:
חשבו את קבוע השגיאה
הערות:
- לרוב בוחרים
, כלומר מחצית את גודל האלמנט בין הרשת הגסה לעדינה. - שיטה זו מספקת הערכה גלובלית לגודל הרשת, אך באזורים מורכבים של הפתרון (למשל, שינויים חדים) ייתכן שנדרש עידון רשת מקומי נוסף.
- בפועל, כדאי להשתמש בערך שמרני יותר של
מזה שחושב, כדי להבטיח שהשגיאה אכן תהיה קטנה מהסף הנדרש.

רשת שעודנה ב-
כדי להעריך את השגיאה. (Zohdi, 2018).
עידון רשת מקומית (Local Mesh Refinement)
בעוד שהשיטות הגלובליות שתוארו לעיל מאפשרות לנו להעריך את גודל הרשת הממוצע הדרוש, לעתים קרובות אנו זקוקים לרשת צפופה יותר באזורים מסוימים של התחום, במיוחד היכן שהפתרון משתנה במהירות (למשל, ליד גבולות או מקורות).
שיטות מבוססות שארית
הגישה הפשוטה והיעילה ביותר לעידון רשת מקומי היא להשתמש בשארית (residual) כמדריך לאזורים שבהם דרוש עידון. יתרונה של גישה זו הוא שהיא אינה דורשת פתרון של מערכת משוואות נוספת, אלא רק חישוב של מספר ביטויים מקומיים.
שיטות מבוססות שארית משתמשות בשלושה מקורות מידע:
- פתרון שיטת האלמנטים הסופיים עצמו (
- תנאי הגבול הנתונים
- משוואת השגיאה ותכונת האורתוגונליות של גלרקין
באמצעות אלה, ניתן לבנות את החסם השגיאה הבא:
כאשר:
שארית זו מודדת עד כמה הפתרון המקורב מפר את המשוואה הדיפרנציאלית בתוך האלמנט.
כאן
שארית זו מודדת את מידת אי-קיום תנאי הגבול מסוג נוימן.
אינדיקטורי שגיאה מקומיים
בהתבסס על החסם לעיל, אנו יכולים להגדיר אינדיקטור שגיאה מקומי לכל אלמנט:
אינדיקטור זה מורכב משלושה מרכיבים:
- שארית הפנימית (חוסר קיום המשוואה הדיפרנציאלית בתוך האלמנט)
- קפיצות בשטף בממשקים בין אלמנטים
- חוסר התאמה לתנאי גבול מסוג נוימן
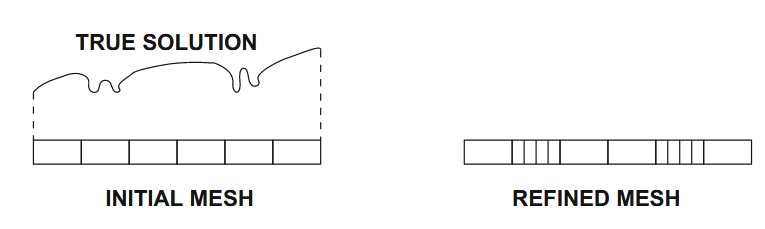
רשת מעודנת מקומית לחישוב פתרונות מקומיים מדויקים יותר. (Zohdi, 2018).
אלגוריתם עידון מקומי
האלגוריתם הפשוט ביותר לעידון רשת מקומית מבוסס על הצעדים הבאים:
- פתרון הבעיה: פתור את בעיית האלמנטים הסופיים על הרשת הנוכחית.
- חישוב אינדיקטורי שגיאה: חשב את ערך
- בחירת אלמנטים לעידון: כל אלמנט שעבורו
- עידון הרשת: חלק את האלמנטים המסומנים לאלמנטים קטנים יותר.
- חזרה: חזור לצעד 1 עד שכל האינדיקטורים קטנים מהסף הנדרש
שיטה זו מאפשרת לנו ליצור רשת מותאמת באופן אופטימלי לבעיה הספציפית, עם אלמנטים קטנים יותר באזורים שבהם הפתרון משתנה במהירות ואלמנטים גדולים יותר באזורים שבהם הפתרון חלק יותר. זהו יתרון משמעותי של שיטת האלמנטים הסופיים האדפטיבית על פני שיטות עם רשת אחידה.