מבוא
נשים לב שאם
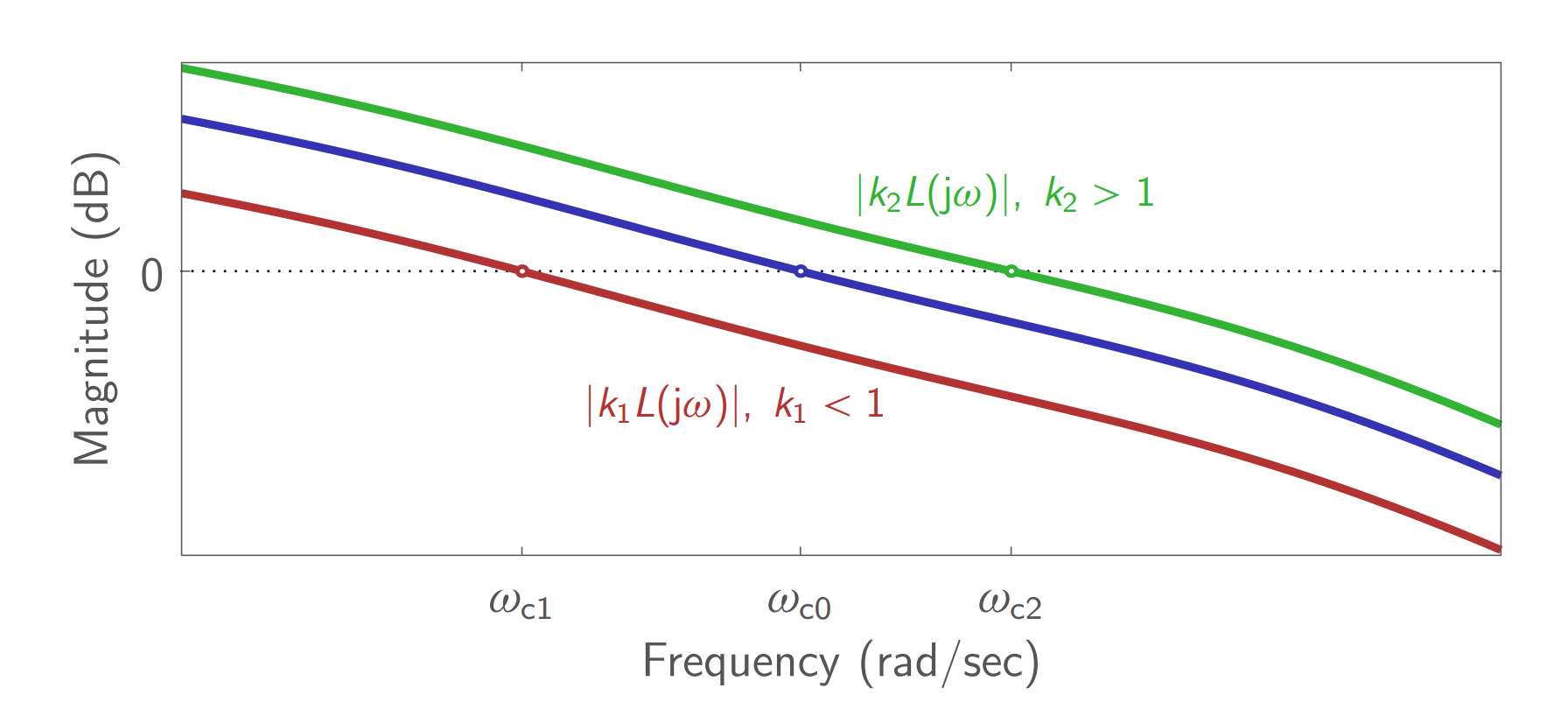
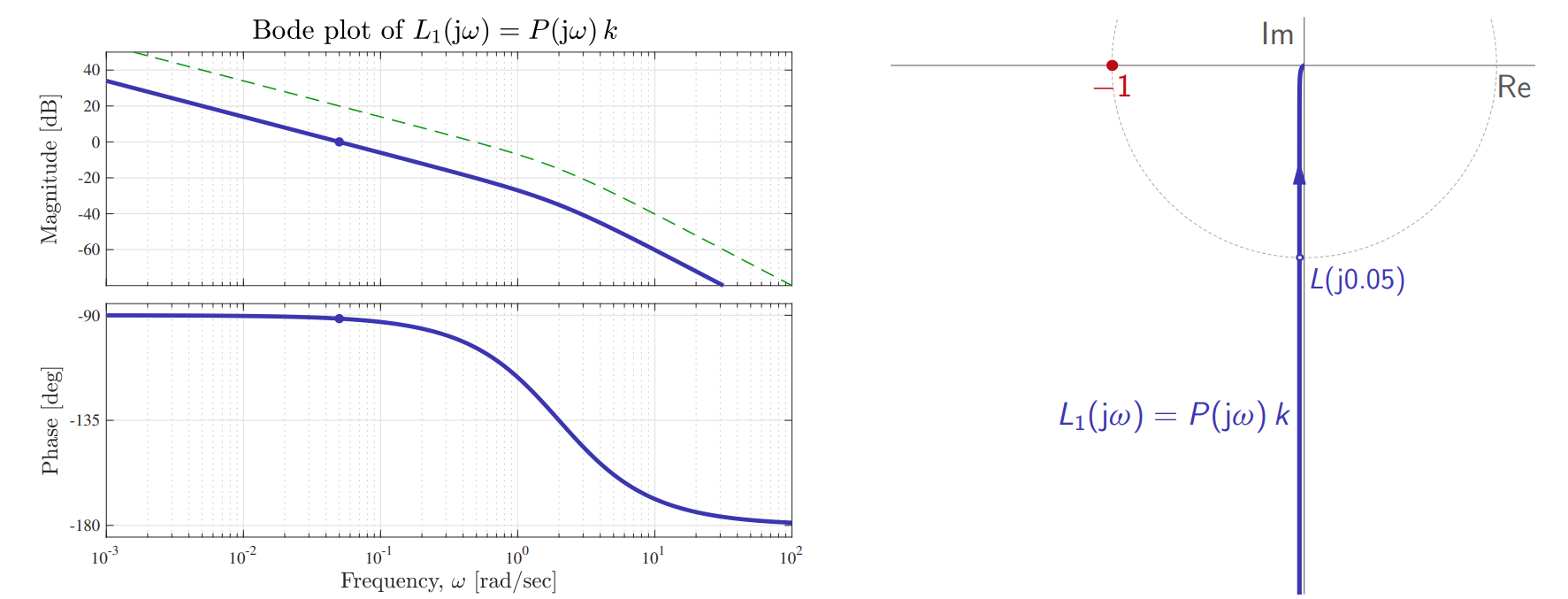
דיאגרמת בודה הממחישה את השפעת ההגבר של
על תדירות המעבר. (Leonid Mirkin’s Homepage, n.d.).
לכן, אם נרצה לדרוש
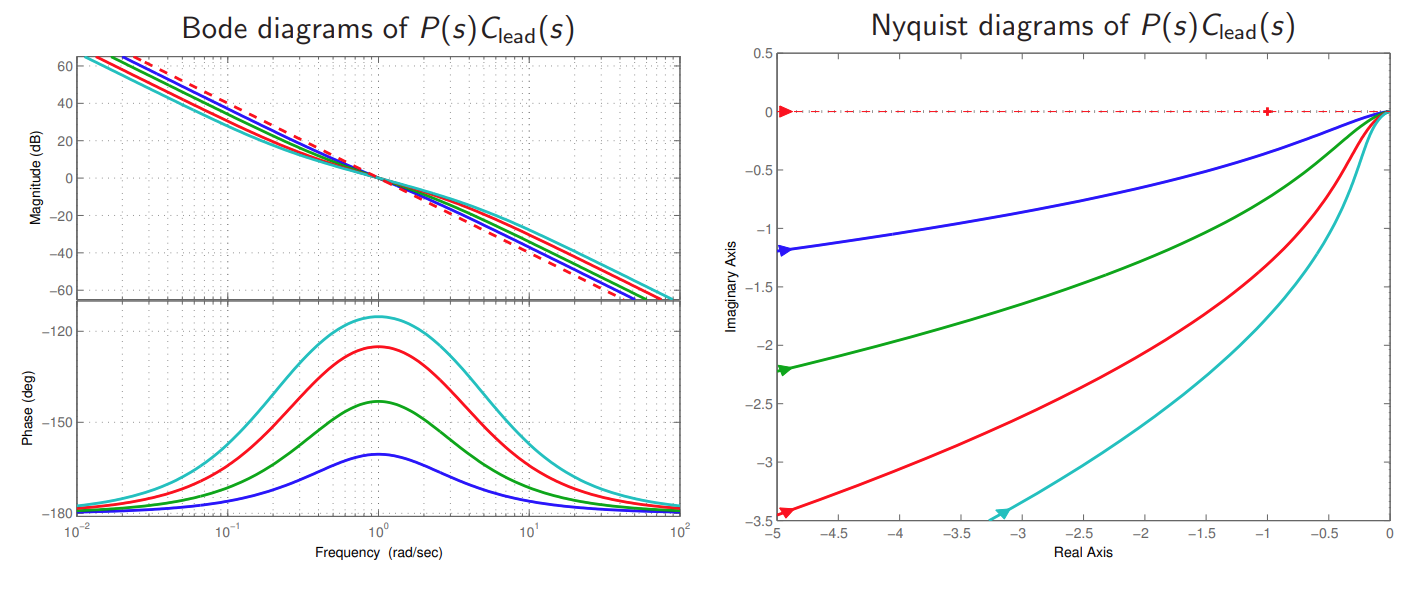
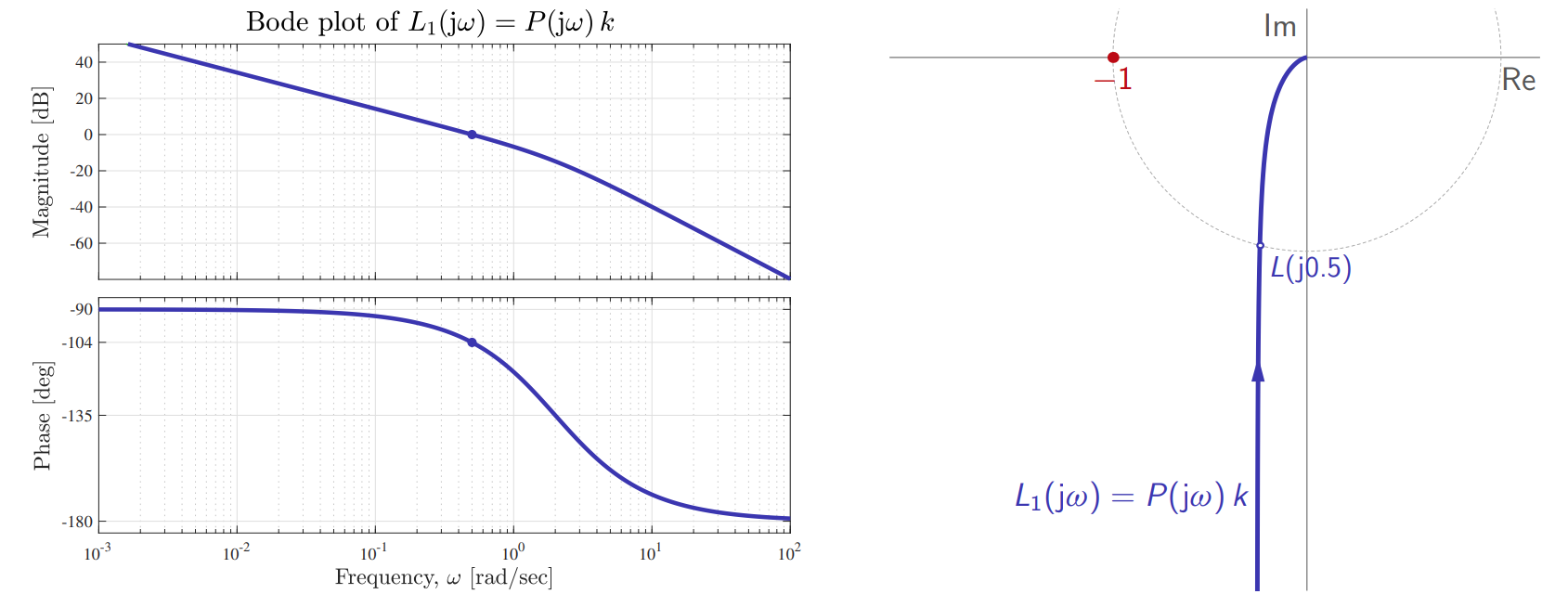
נביט כעת בתהליך הבא, שנניח והוא כבר בתדירות מעבר שאנו רוצים:
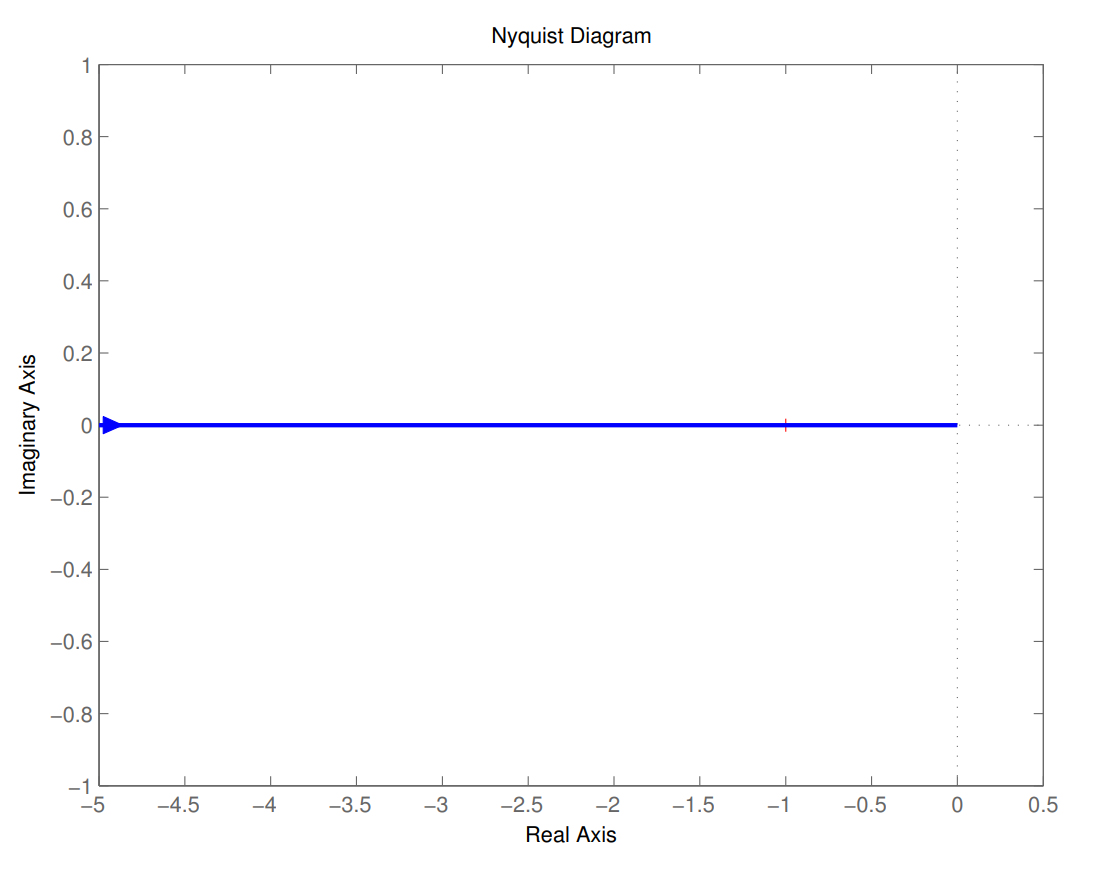
גרף פולארי של
. (Leonid Mirkin’s Homepage, n.d.).
בקר פרופורציוני פשוט
אז, עלינו כעת למצוא בקר
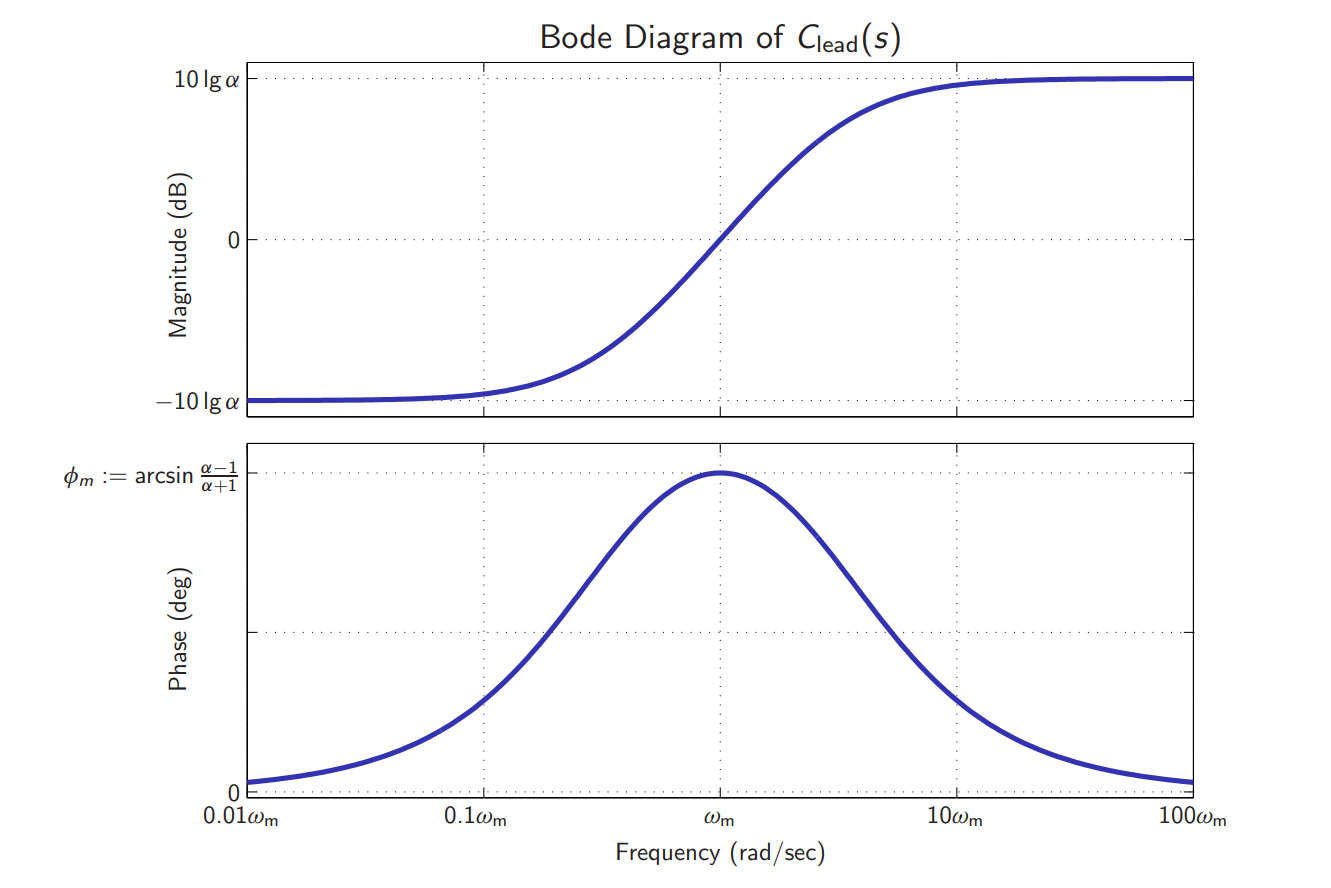
בקר קידום
נביט למשל בבקר מהצורה:
אז, עבור
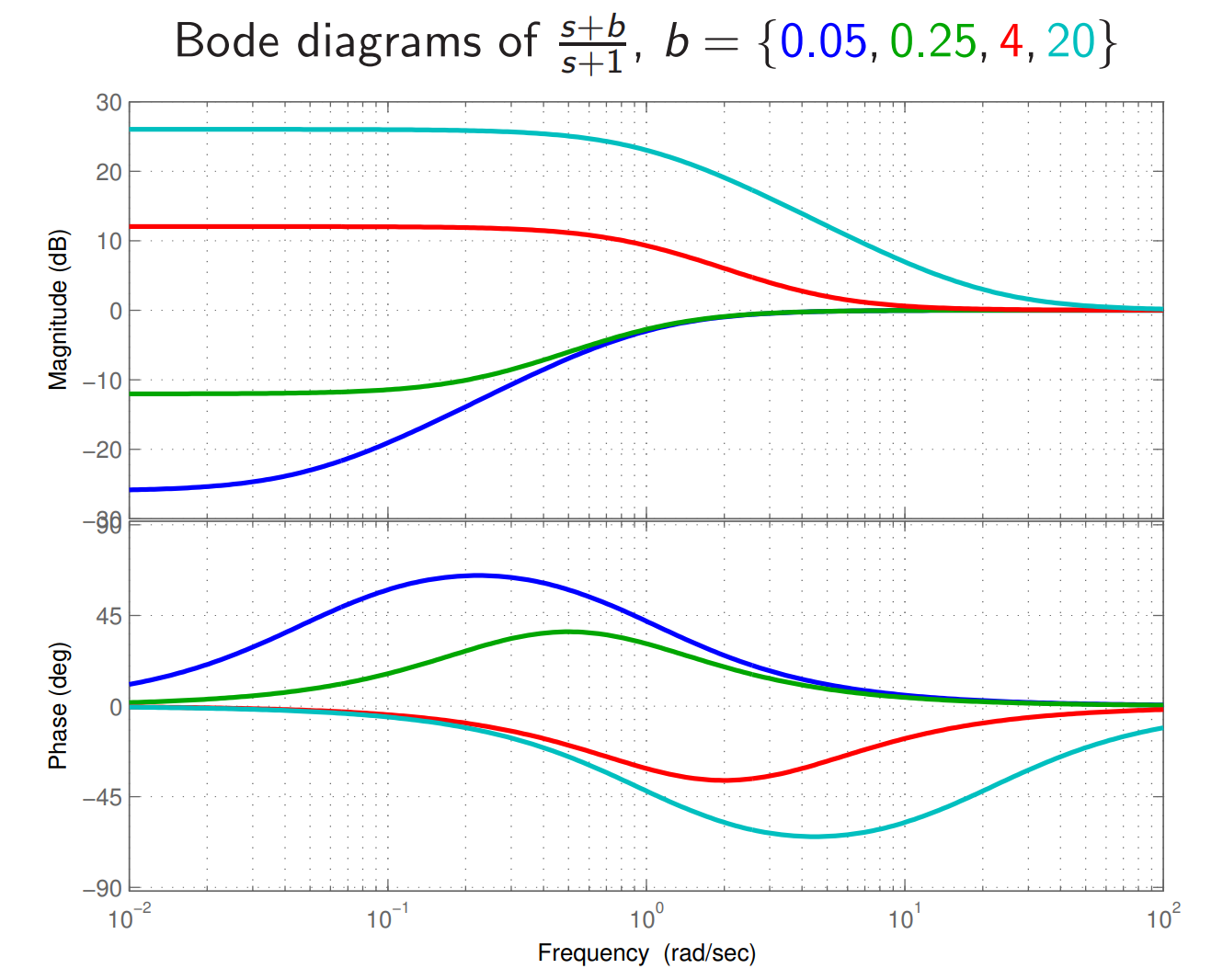
ניתן לראות שכל בקר
כאשר
ניתן לראות שליד
הערה:
למען האמת, ליאוניד ממליץ לבחור
שטיפה יותר קטן מ- , מסיבות שאני לא זוכר אבל אם ליאוניד אמר אז ליאוניד אמר.
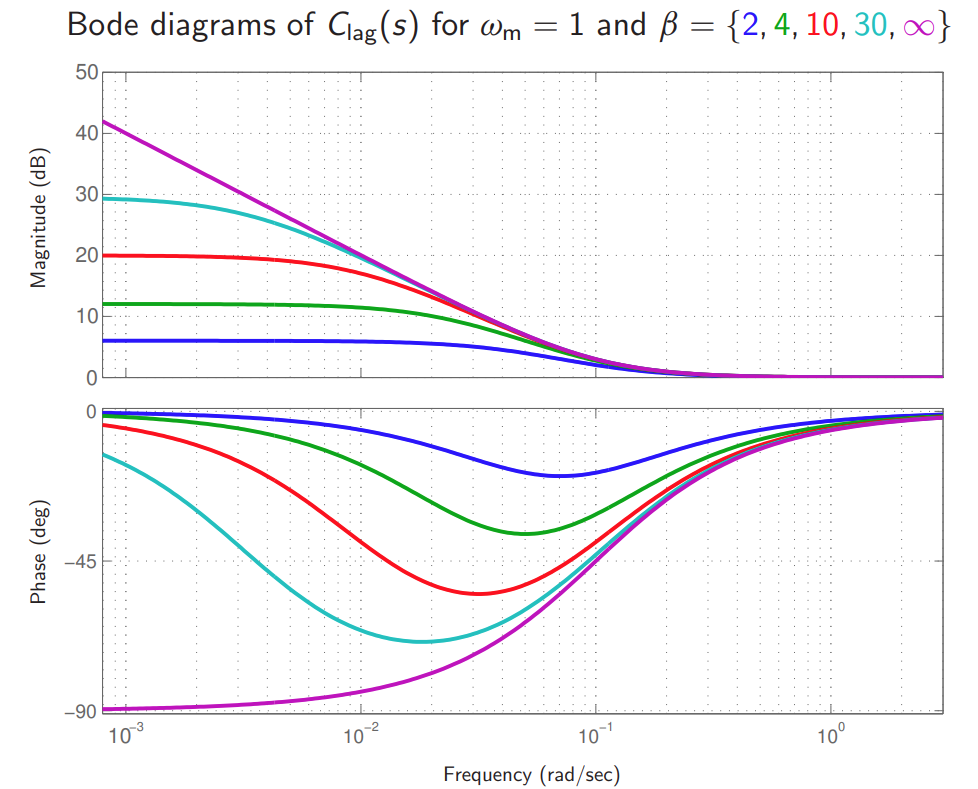
מבחינת ההשפעה של
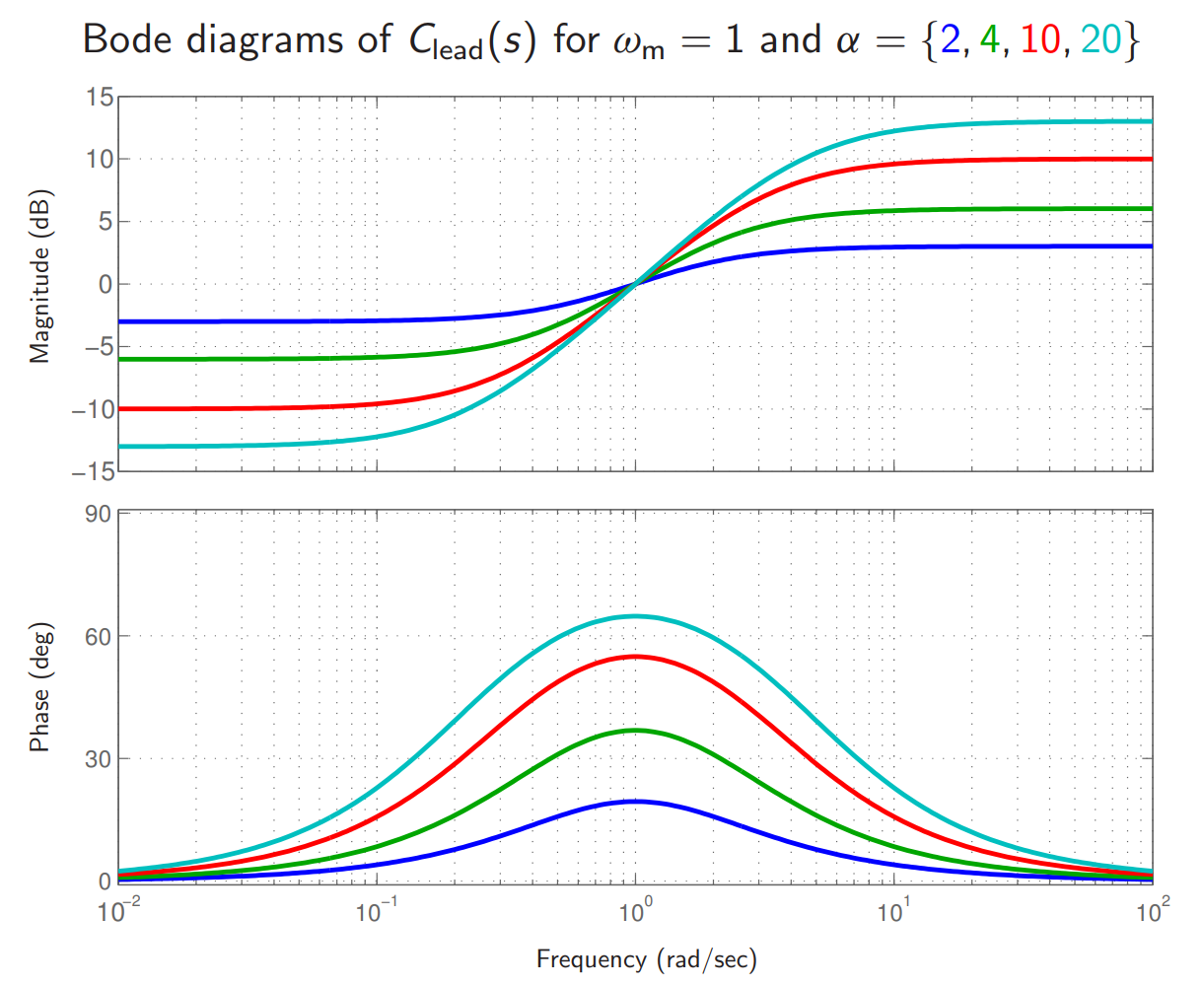
נסיק שאם אנו בוחרים
- לא משנה את
- מגדיל את
אבל, הוא גם:
- מקטין את ההגבר בתדירויות נמוכות.
- מגדיל את ההגבר בתדירויות גבוהות.
- מקטין את
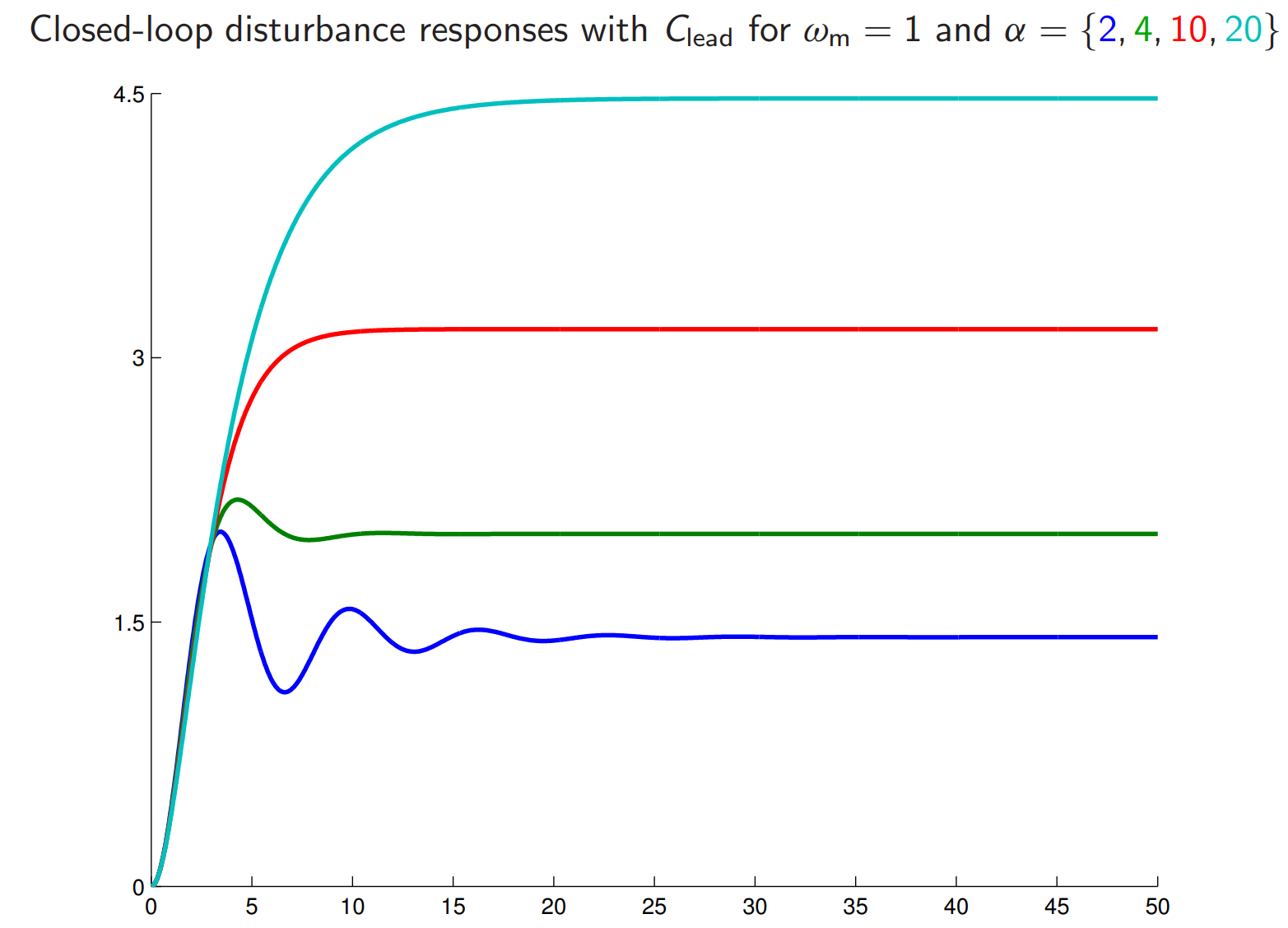
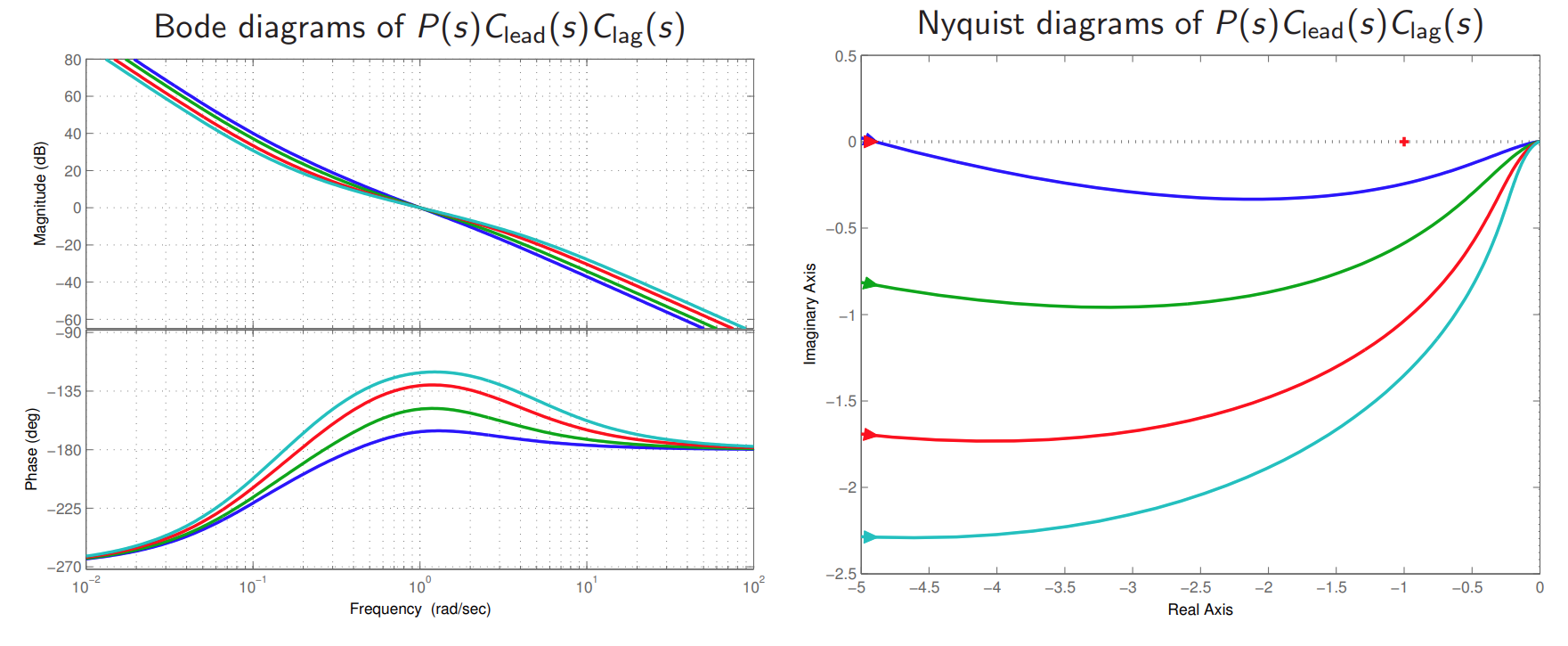
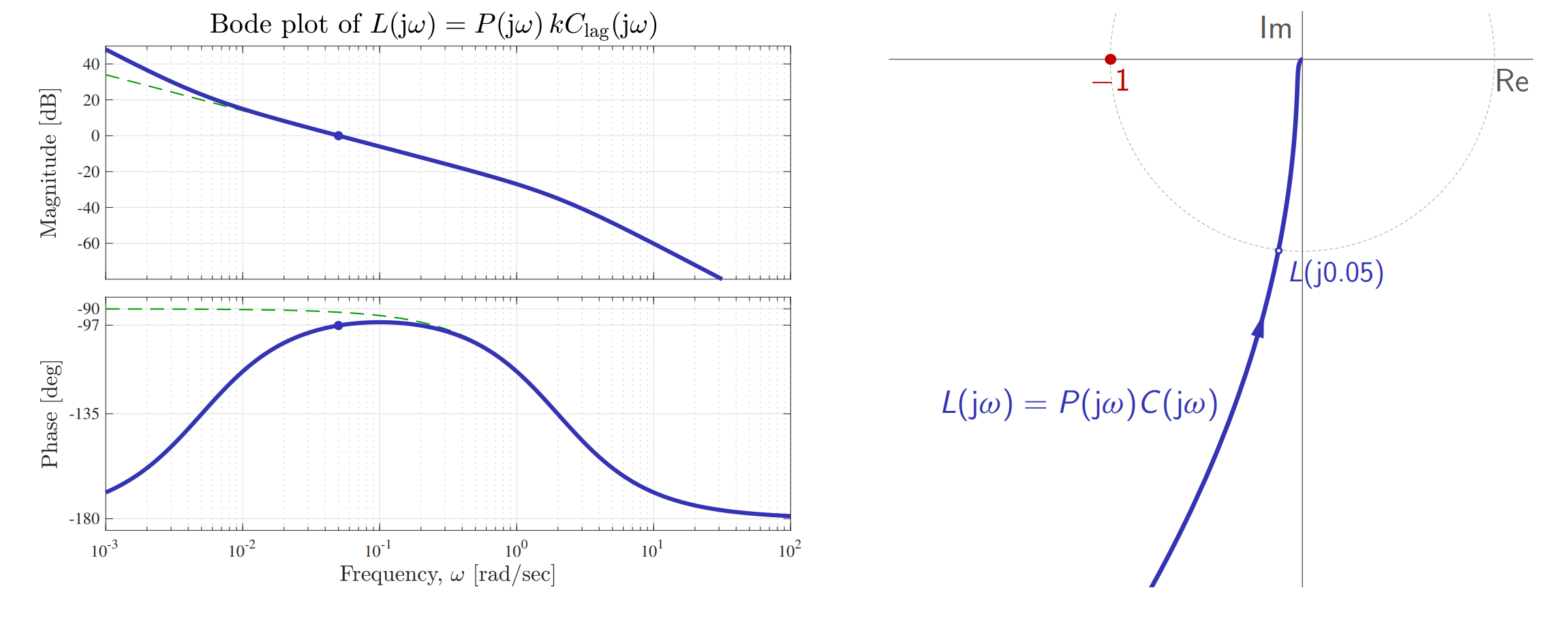
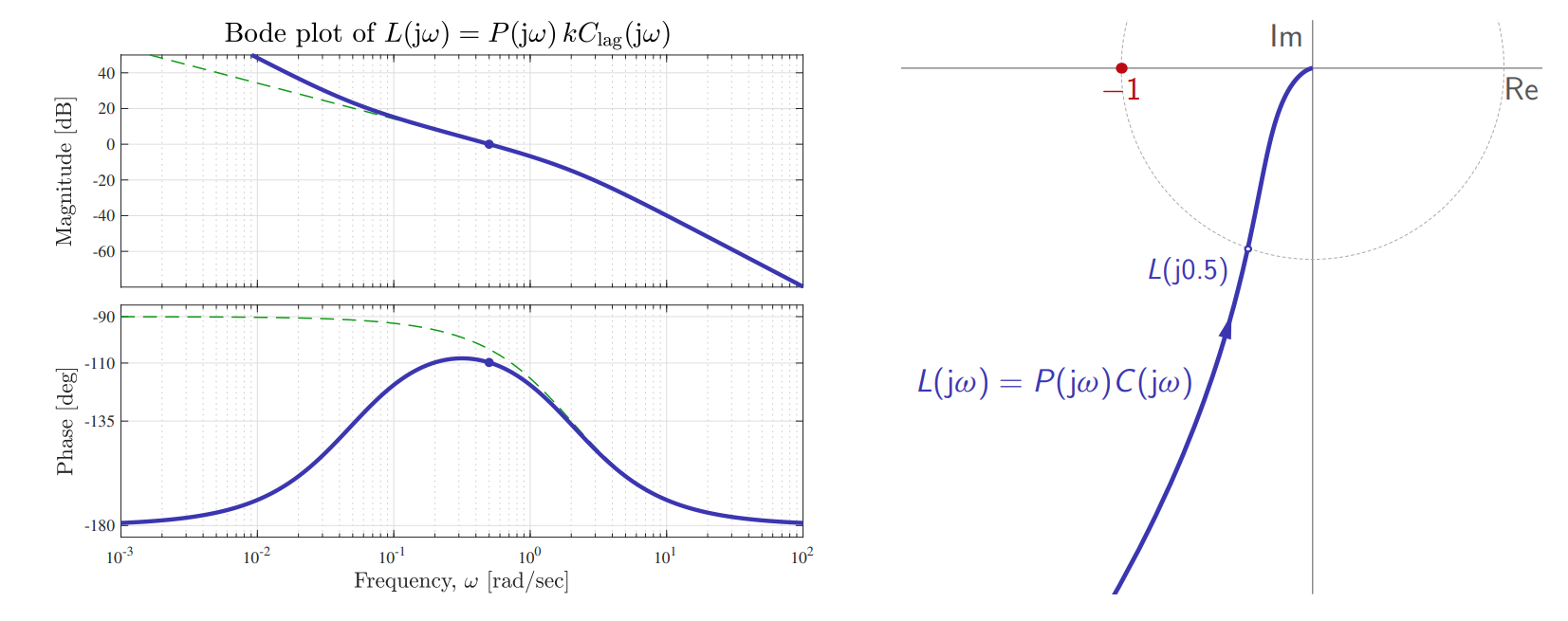
נביט כעת בדיאגרמות של המערכת בחוג פתוח עבור אותם ערכי
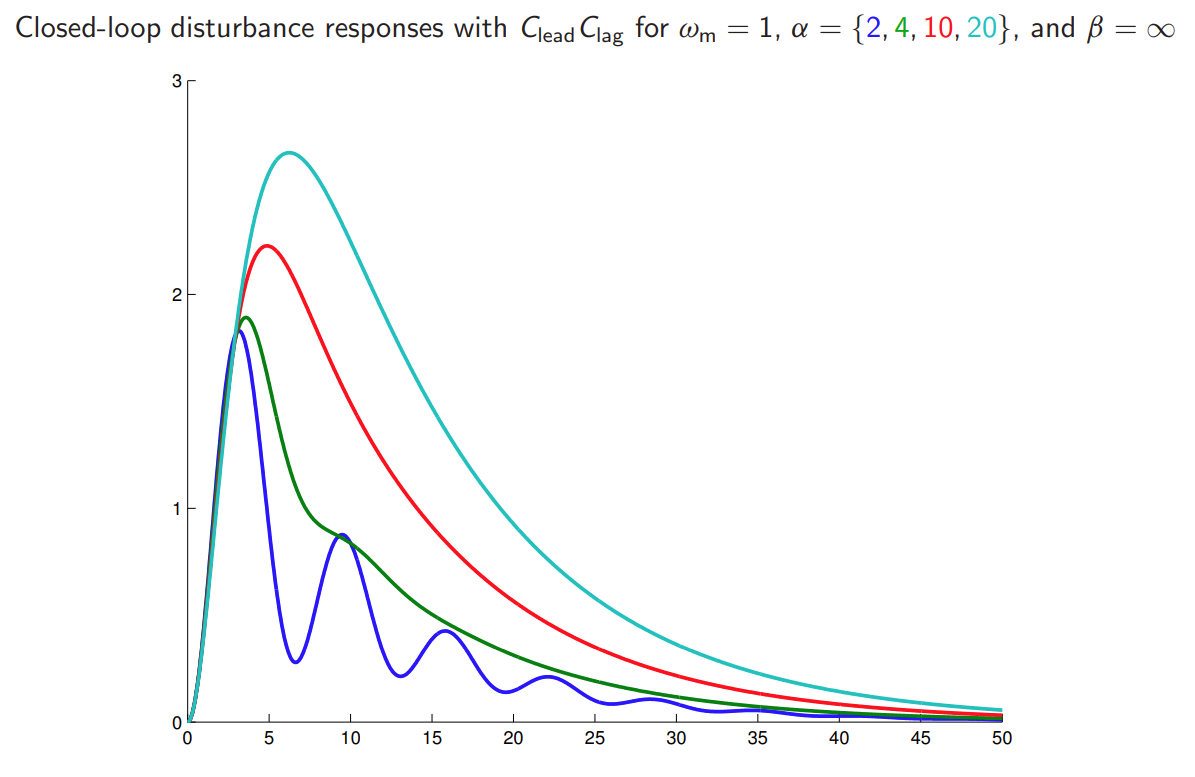
מבחינת החוג הסגור, תגובת המדרגה תהיה:
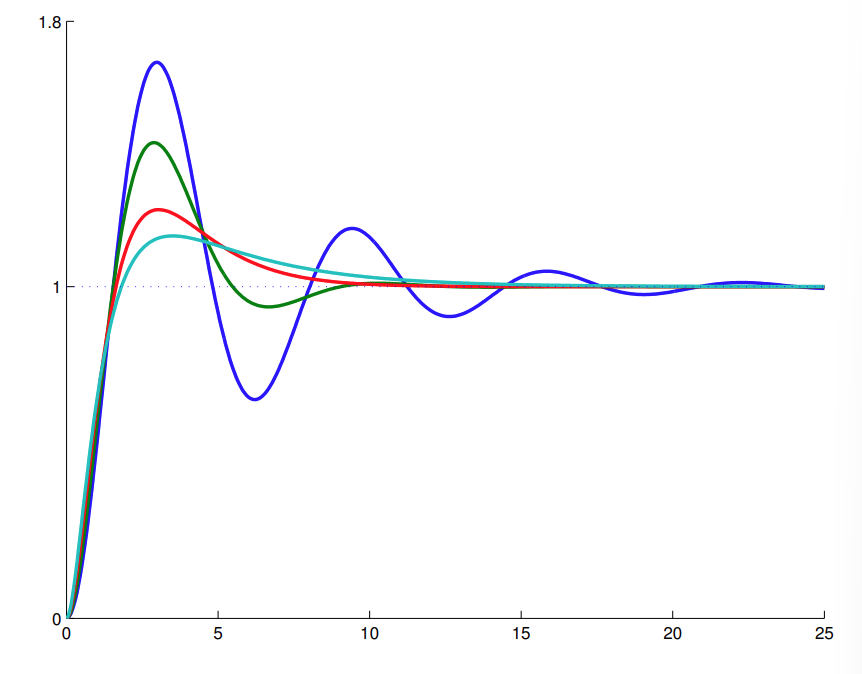
תגובת מדרגה של החוג הסגור.
ניתן להראות שגובה ה”בטן” המקסימלי, שהוא למעשה קידום הפאזה המקסימלי
גרף להמחשת פונקציה זו:
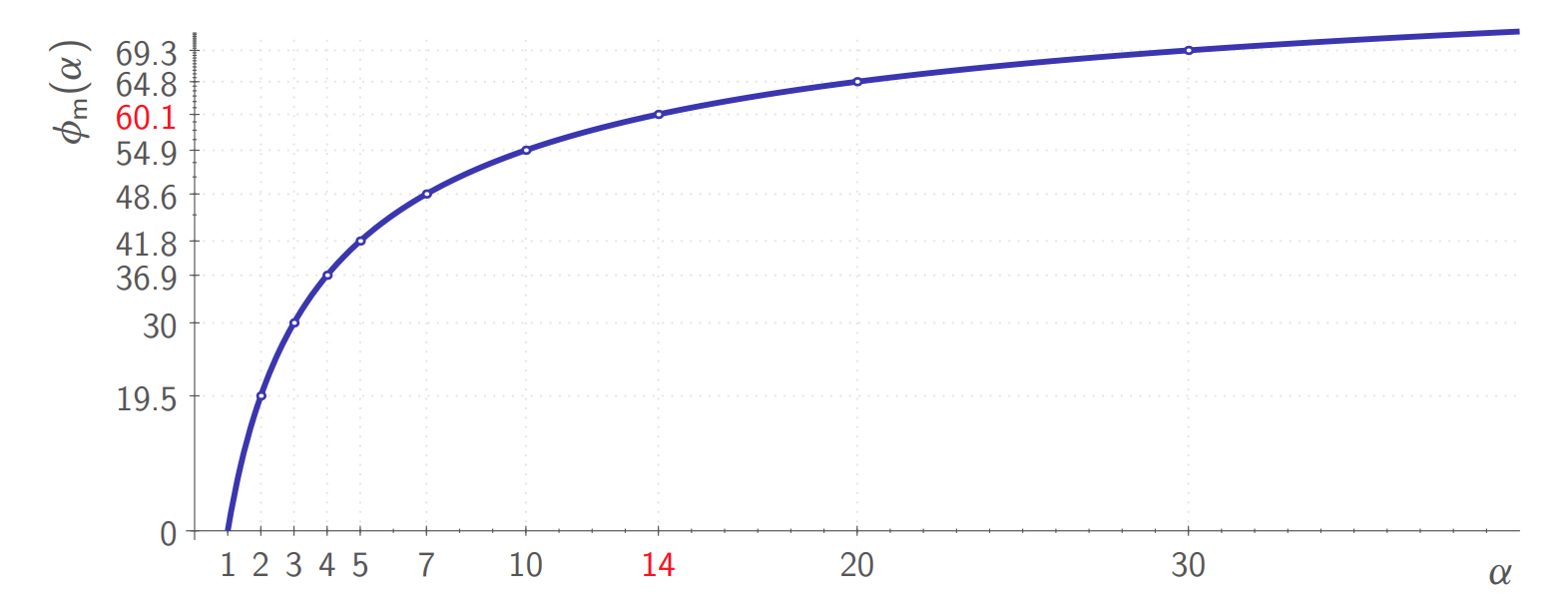
קידום הפאזה המקסימלי כתלות ב-
.
מאחר והשיפוע של הגרף לעיל לערכי
נשים לב שעבור
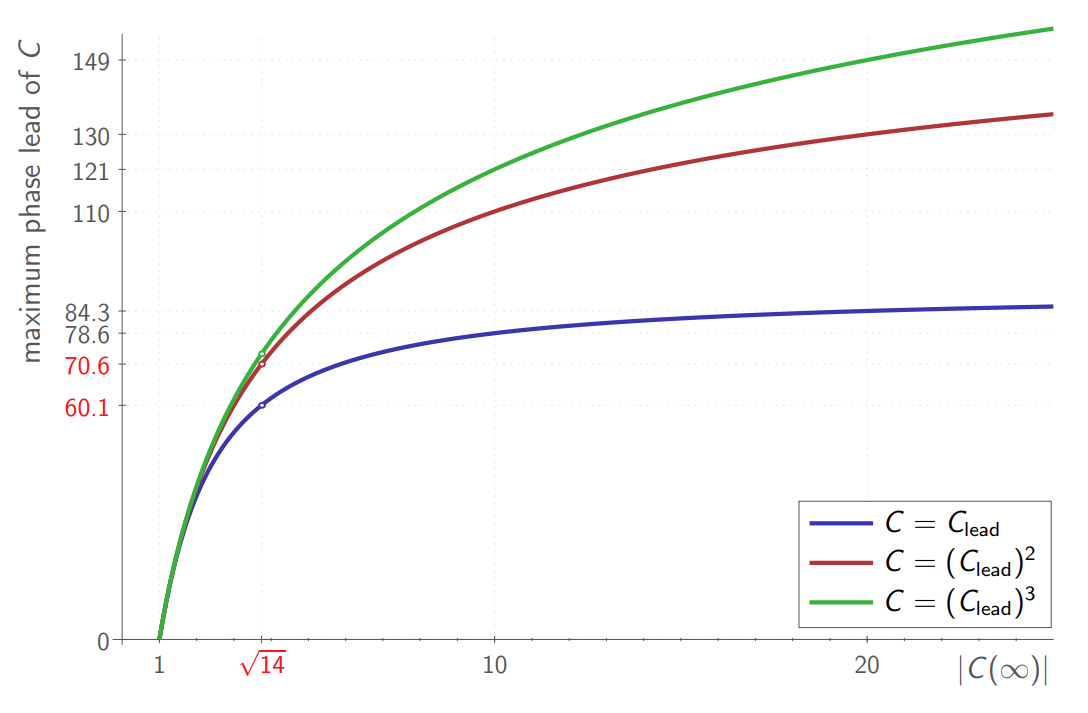
השפעת עוד בקרי קידום על קידום הפאזה המקסימלי.
בקר פיגור
אחת מהבעיות של בקר קידום היא שהיא מחריפה את שגיאת המצב המתמיד של החוג הסגור:
כדי להסביר זאת, נזכור שהשגיאה עבור הפרעת מדרגה היא:
לכן, במקרה של
ניתן לחשוב שאולי אם נגדיל את ההגבר הסטטי של
- תעלה את ההגבר בתדרים גבוהים.
- תגדיל את רוחב הפס של המערכת יותר מהדרוש.
אנו רוצים להגדיל את ההגבר בתדרים נמוכים, בלי לשנות את ההגבר/הפאזה באזור
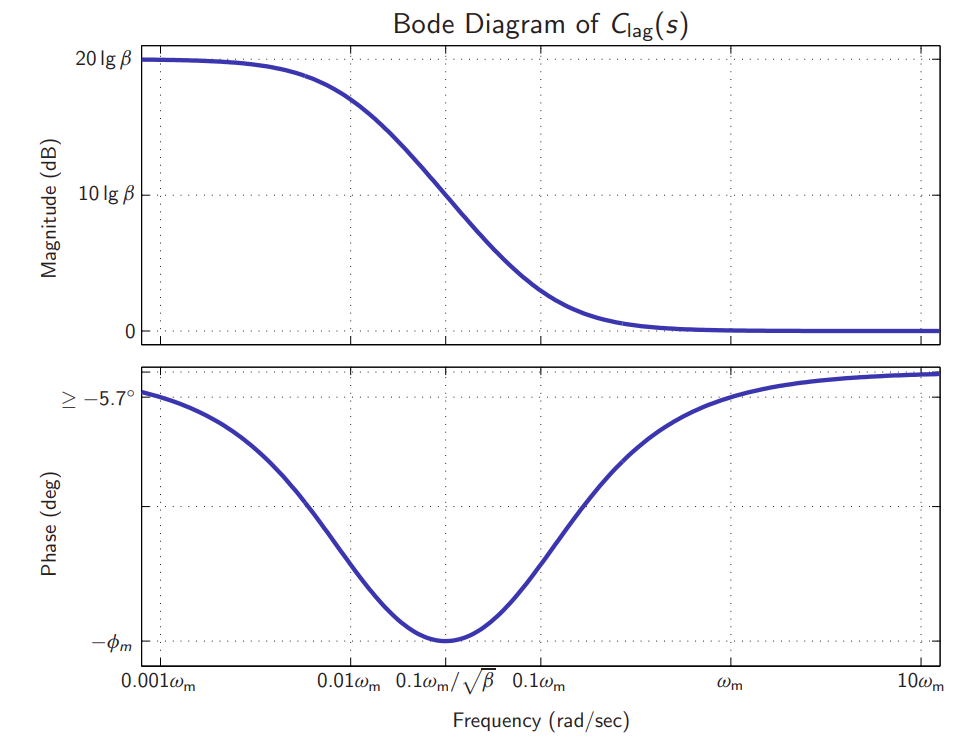
כדי לפתור את בעיה זו, אנו מציעים להוסיף לבקר קידום עוד בקר, שנקרא בקר פיגור. צורתו הכללית:
כאשר
אז למשל:
אם אנו רוצים שגיאה אפסית במצב מתמיד עבור
נקבל:
תגובת המדרגה תהיה כעת:
אם אנו בוחרים
- מגדיל את ההגבר בתדרים נמוכים של
- מעלה לכל היותר ב-
אבל:
- הוא מעלה את הפיגור הפאזה.
- הוא מעלה את ההגבר באזור
דוגמאות תכן
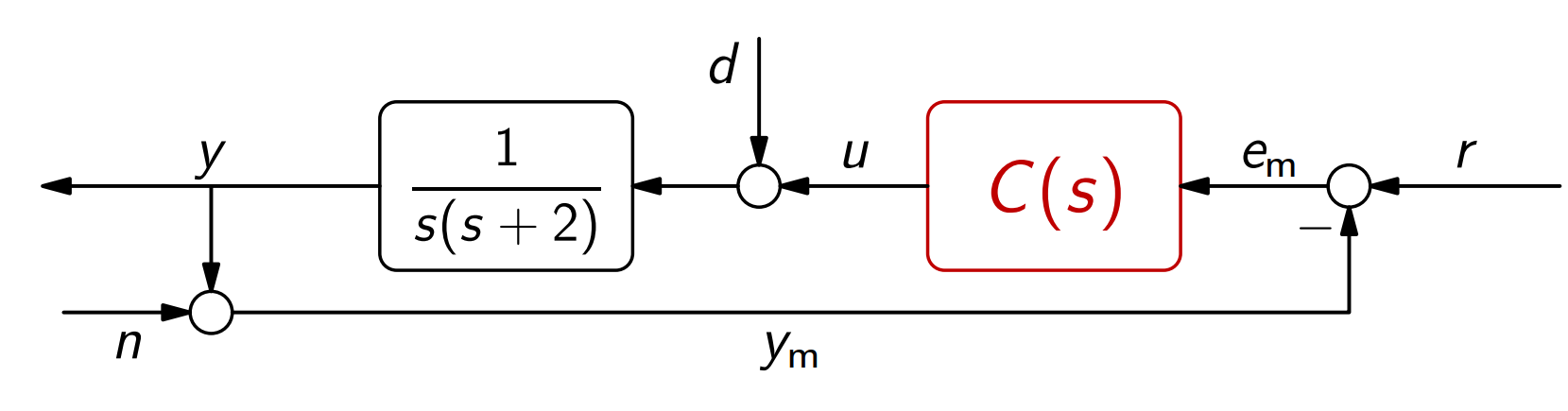
נביט במערכת של בקרת מנוע DC:
נדרוש:
- יציבות חוג סגור.
- שגיאה אפסית במצב מתמיד למדרגה ב-
- שגיאה אפסית במצב מתמיד למדרגה ב-
- הגבר פאזה
- תדירות
הערה:
אנו מניחים שהתהליך מנורמל, כך שמבחינת האות בקרה,
נחשב “קטן”, ו- הוא “גדול”.
דוגמה:
לקוח מ-(Leonid Mirkin’s Homepage, n.d.).
נניח ש-. אנו רוצים לבקר את התהליך:
לכן, אם נקטין את ההגבר, נקבל אתהרצוי:
כאן,
, ואנו לא צריכים קידום בפאזה.
אנו רוצים גם שהשגיאה במצב מתמיד להפרעת מדרגה תתאפס. אם נשתמש בבקר פיגור עםו- :
זה נותן לנו, שזה אחלה. הבקר המתקבל הוא:
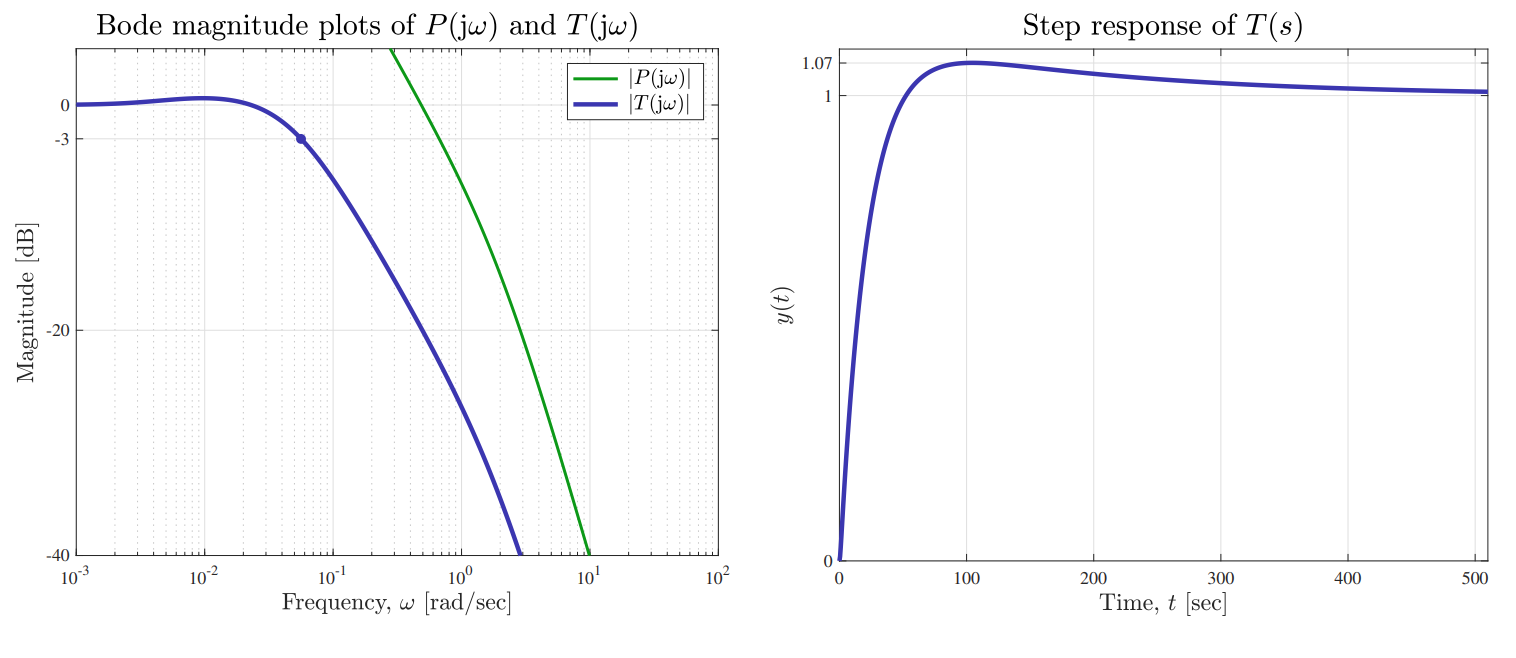
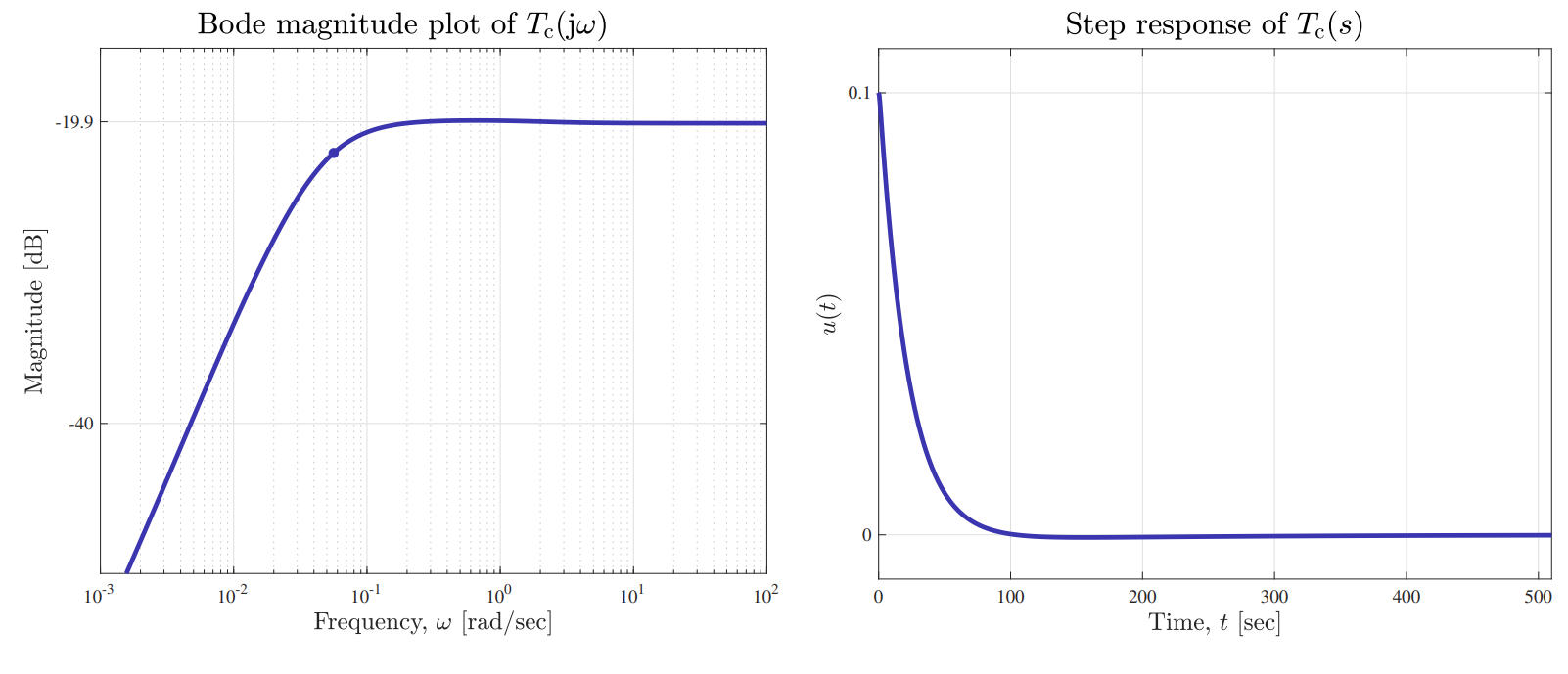
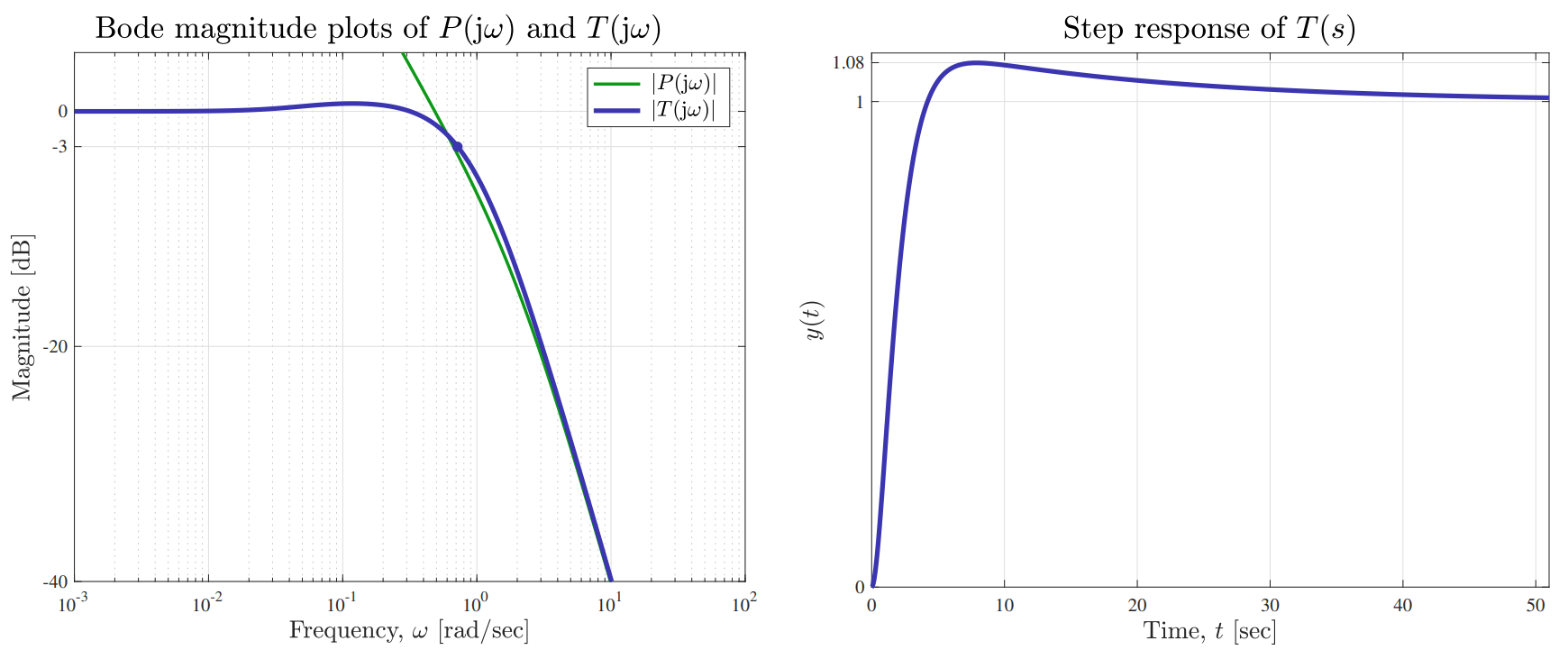
נשים לב ש:
- שיא התהודה (הרזוננס) מאוד קטן, ולכן התגובת-יתר, OS, קטנה.
- רוחב הפס של החוג הסגור הוא בערך
, שזה קצת יותר מ- , וקטן יותר מהרוחב פס בחוג הפתוח. התגובה להפרעה:
נשים לב שכיוון שאין הרבה הגבר סטטי לבקר, הרגישות להפרעה די גבוה.
מבחינת מאמץ בקרה:
נשים לב שמאחר והרוחב פס של החוג הסגור יותר קטן מהרוחב פס של החוג הפתוח, אנו מקבלים מאמץ בקרה נמוך.
דוגמה:
נעבוד עם אותו התהליך, אבל נדרוש
. נקבל:
כאן, כך שאנו עדיין לא צריכים בקר קידום, גם אחרי שהבקר פיגור יוסיף .
נבחר בקר פיגור עםו- :
אנו מקבלים, שזה גם יותר ממה שאנו צריכים. נקבל את הבקר:
נשים לב ש:
- שיא התהודה (הרזוננס) מאוד קטן, ולכן התגובת-יתר, OS, קטנה.
- רוחב הפס של החוג הסגור הוא בערך
, שזה קצת יותר מ- , ובערך שווה לרוחב הפס בחוג הפתוח. התגובה להפרעה:
נשים לב שמאחר וההגבר הסטטי של הבקר יותר גבוה, הרגישות להפרעות יותר נמוכה.מבחינת מאמץ בקרה:
רוחב הפס של החוג הסגור בערך באותו הסדר גודל של החוג הפתוח, ולכן המאמץ בקרה כאן יותר גבוה ממקודם.
דוגמה:
נבחר כעת
לתהליך. לכן, נוסיף הגבר .
כאן,, ולכן אנו צריכים קידום פאזה של , שעבורו קידום אחד מספיק. נקבל:
כאן,
, שזה בדיוק מה שאנו צריכים לפני שהבקר פיגור מוסיף את ה- שלו. ביחד עם הבקר פיגור נקבל:
זה מניב
, שזה בדיוק מה שאנו צריכים. הבקר המתקבל הוא: תגובת המערכת:
מגניב. קיבלנו תהודה יותר גדולה, ולכן OS יותר גדול. בנוסף רוחב הפס של המערכת הוא
, שזה קצת יותר מ- , ויותר גבוה מרוחב הפס של המערכת בחוג פתוח.
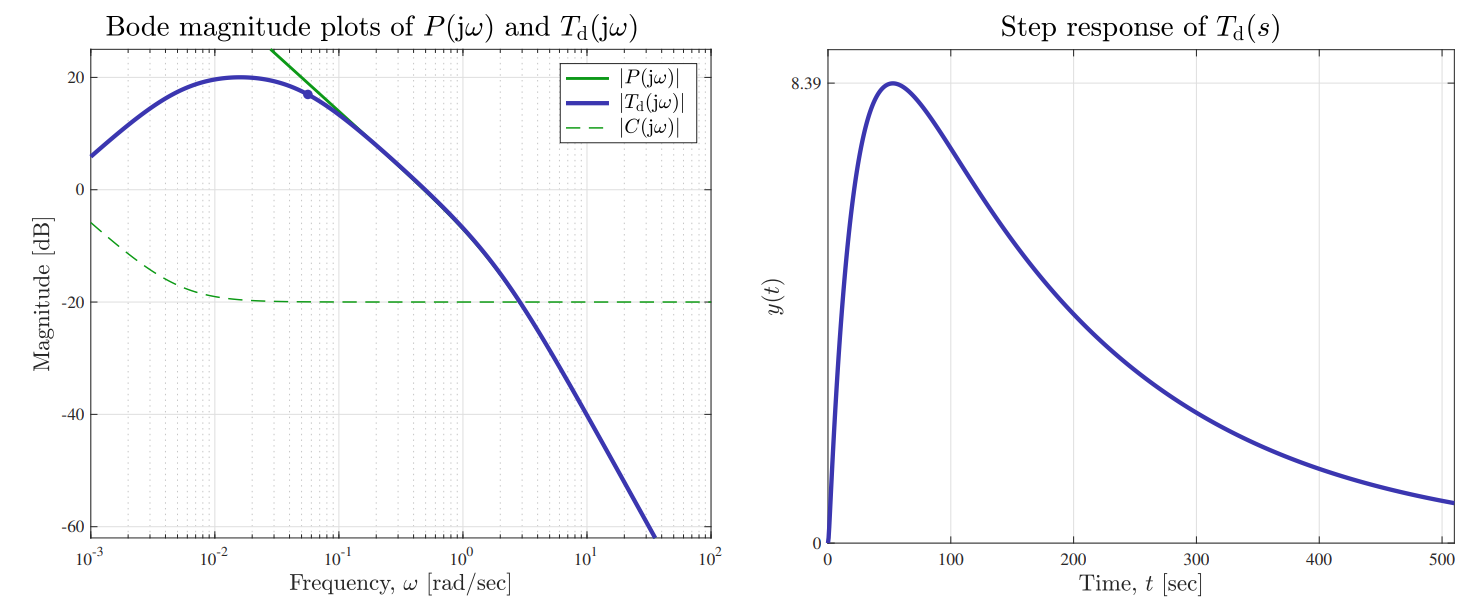
התגובה להפרעה:
מגניב. הגבר סטטי גבוה על הבקר נותן לנו רגישות להפרעות יותר נמוכה.תגובת האות בקרה:
וואלה באסה. no free lunches כמו שליאוניד אומר. מאחר ורוחב הפס של החוג הסגור גדול יותר מרוחב הפס של החוג הפתוח, אנו מקבלים מאמץ בקרה די גבוה.
תרגילים
תרגיל 1
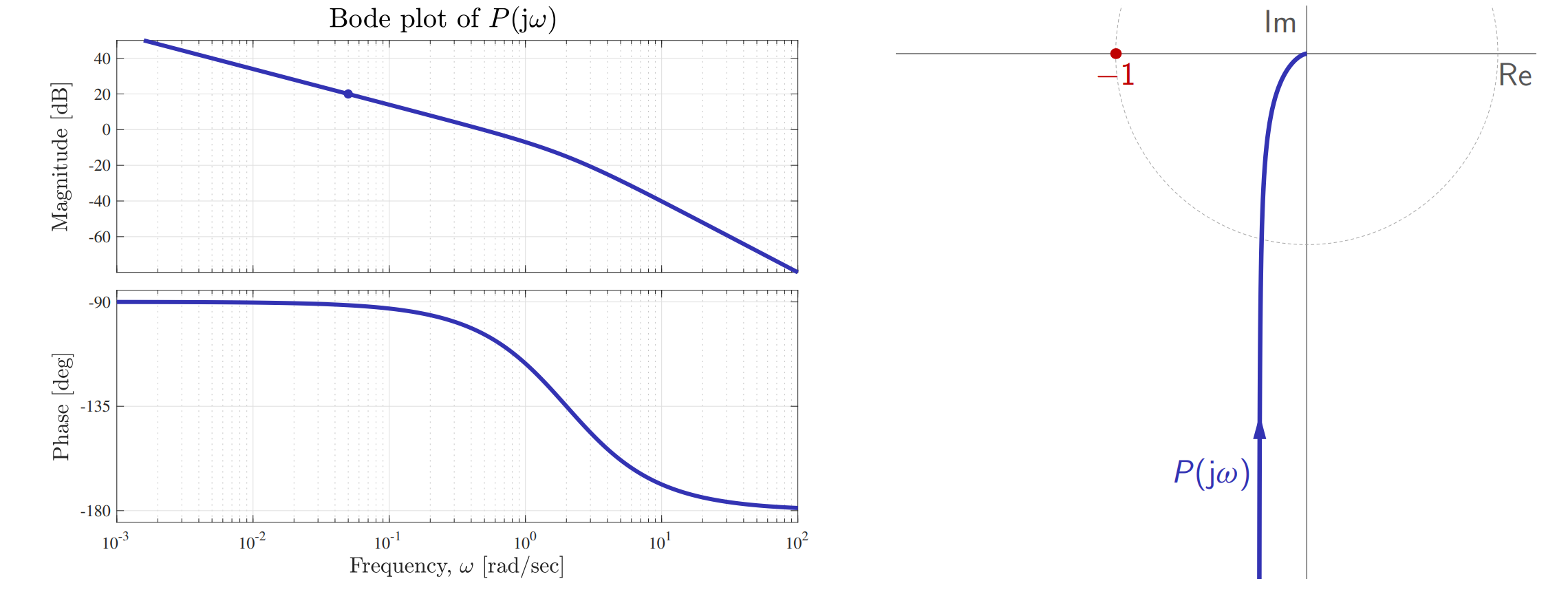
נתון התהליך הבא:
שהגרף בודה שלו:
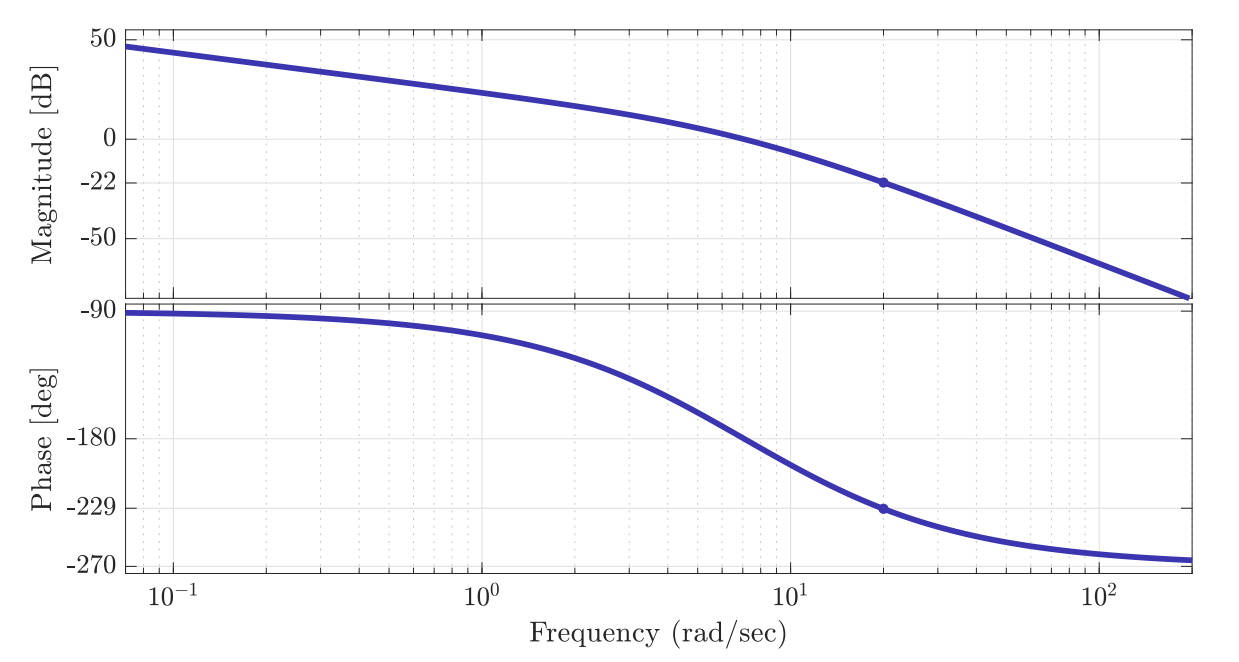
גרף בודה של
.
תכננו בקר מייצב
- רוחב הפס של החוג הסגור
- הגבר פאזה
- השגיאה במצב מתמיד לאות ייחוס מדרגה לא עולה על
- השגיאה במצב מתמיד להפרעת מדרגה לא עולה על
פתרון:
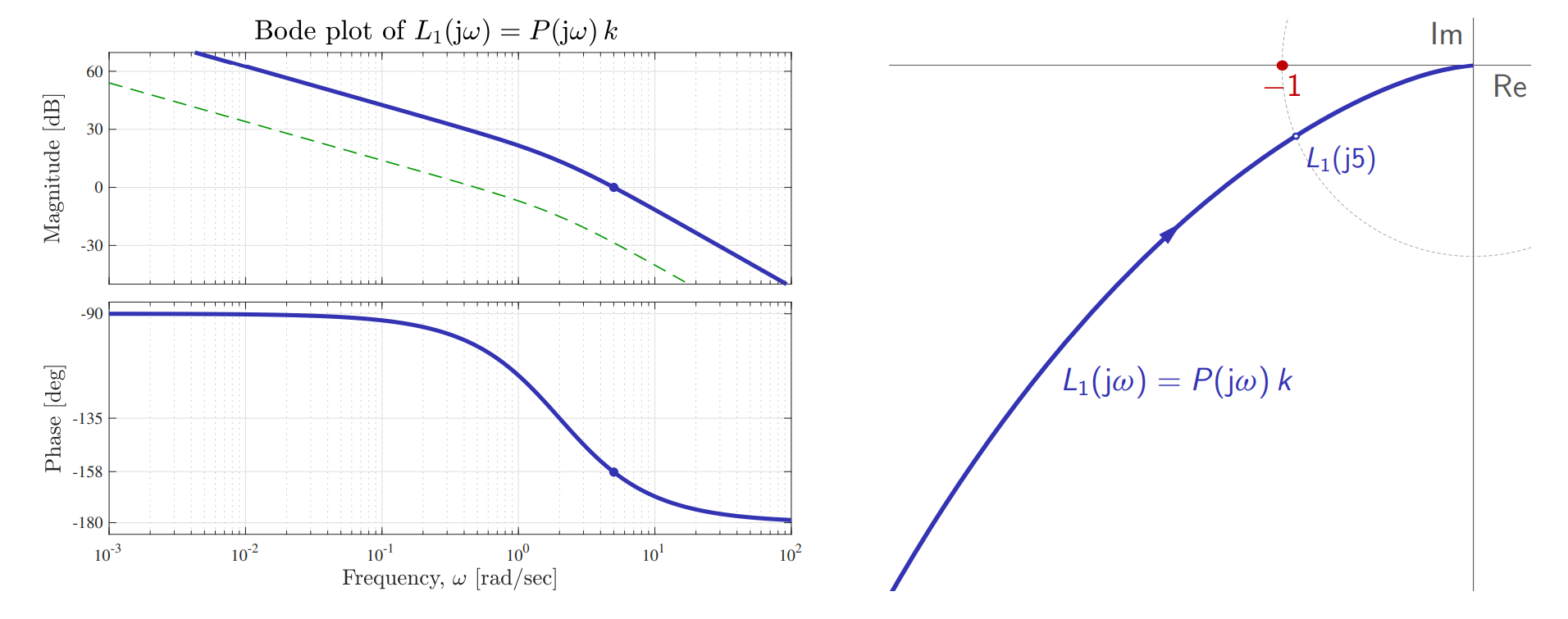
נקבע את תדר המעבר. נצטרך לכפול בהגבר
נקבל:
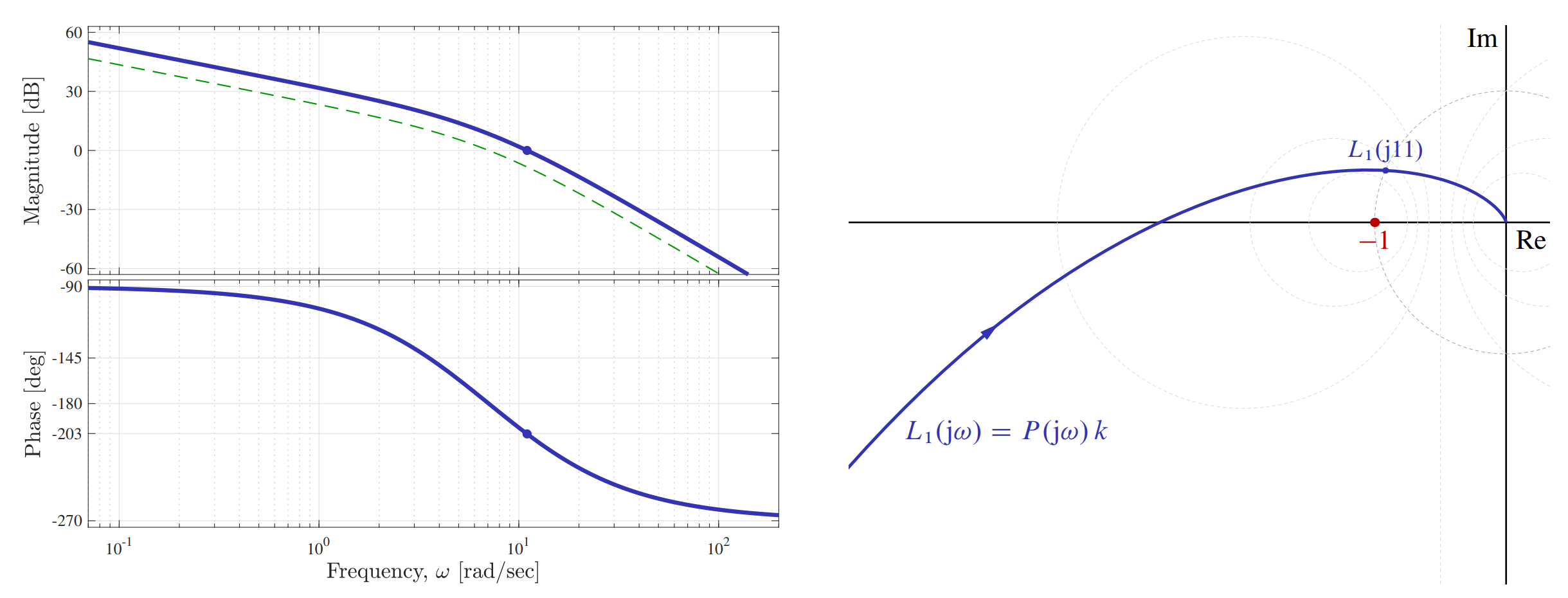
גרף בודה ופולארי של
.
קיבלנו תדר מעבר רצוי, אך פאזה
נשים לב שבקר קידום אחד לא כל כך עוזר לנו לעקוף את
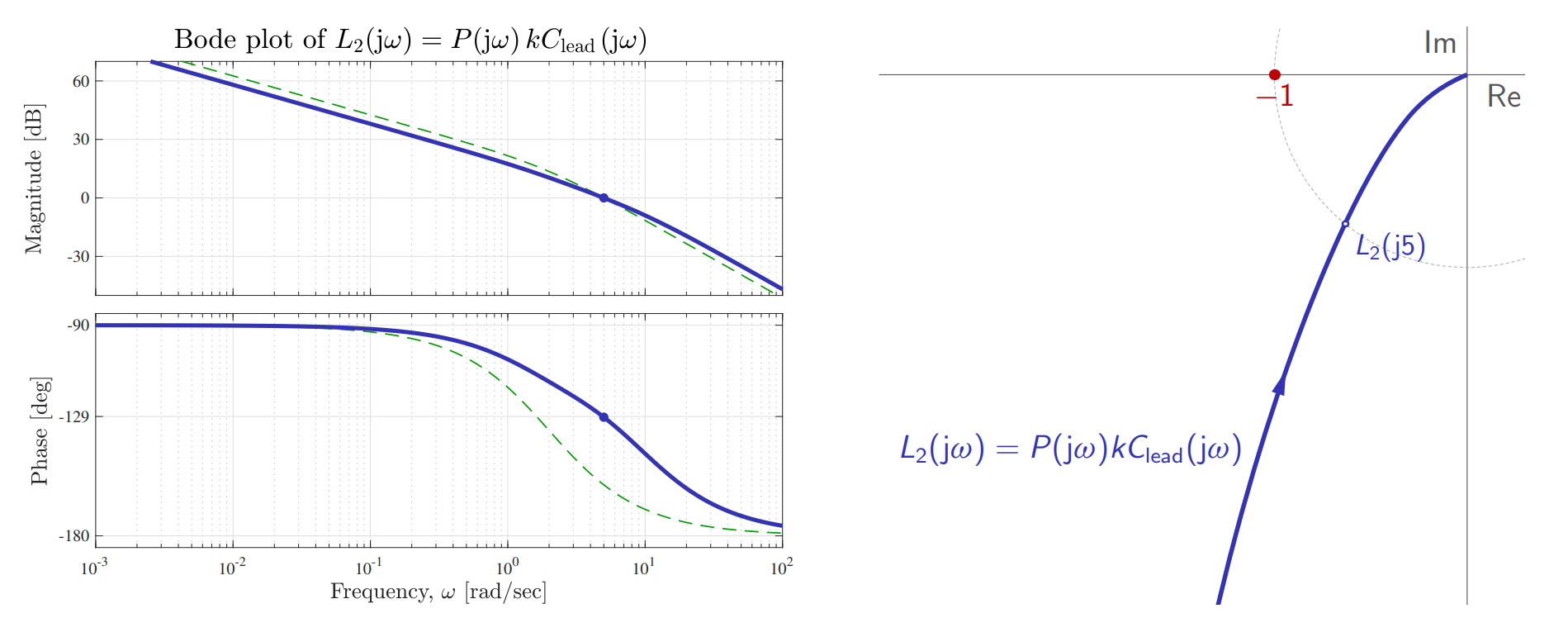
נקבל:
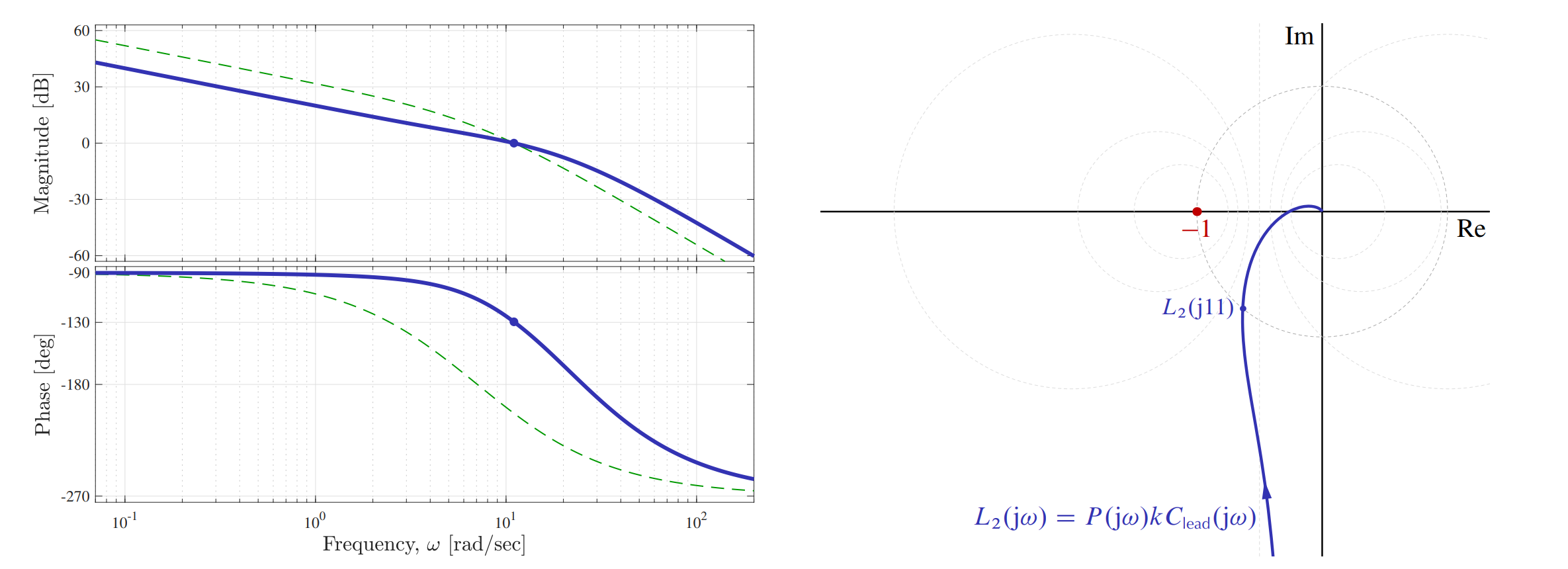
גרף בודה ופולארי של
.
מהדרישה הרביעית, אנו צריכים שהשגיאה מהפרעה תקיים:
כלומר:
כדי לקיים זאת, נביט מה קורה ב-
נבין שאנו צריכים להוסיף בקר פיגור, עם
ההגבר הסטטי שלו:
כדי שנקיים
נקבל:
שהוא באמת מקיים
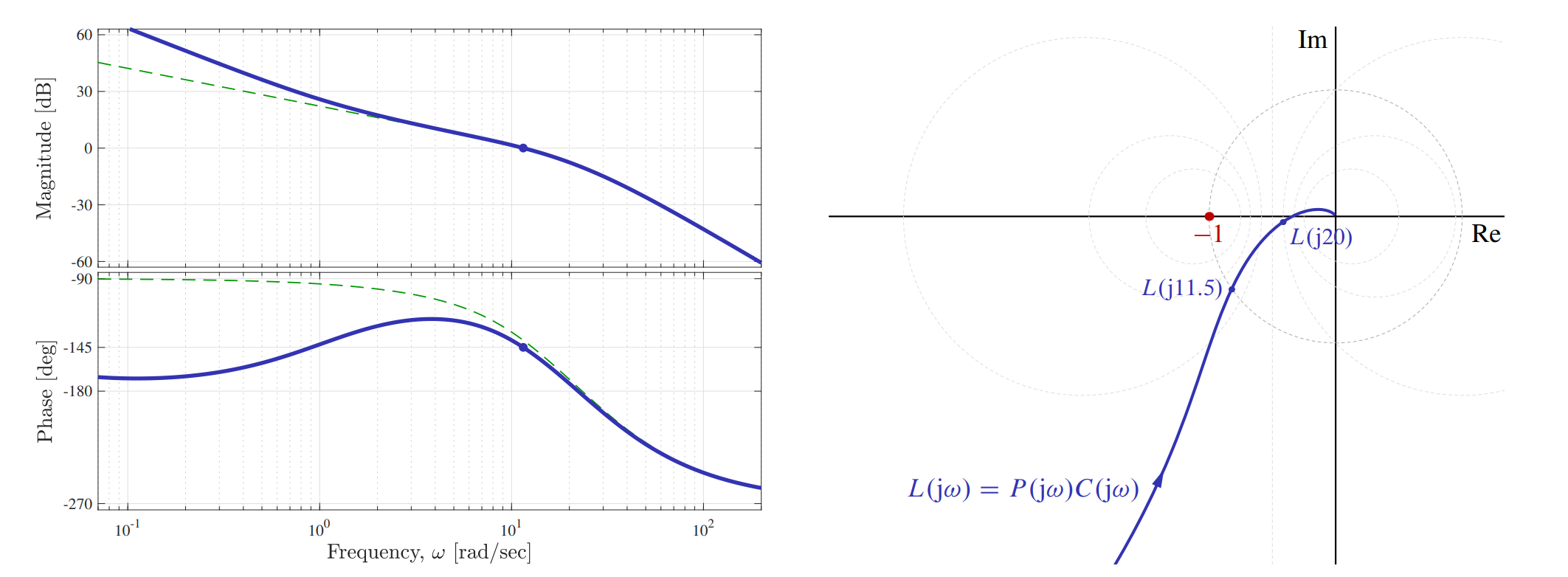
גרף בודה ופולארי של
.
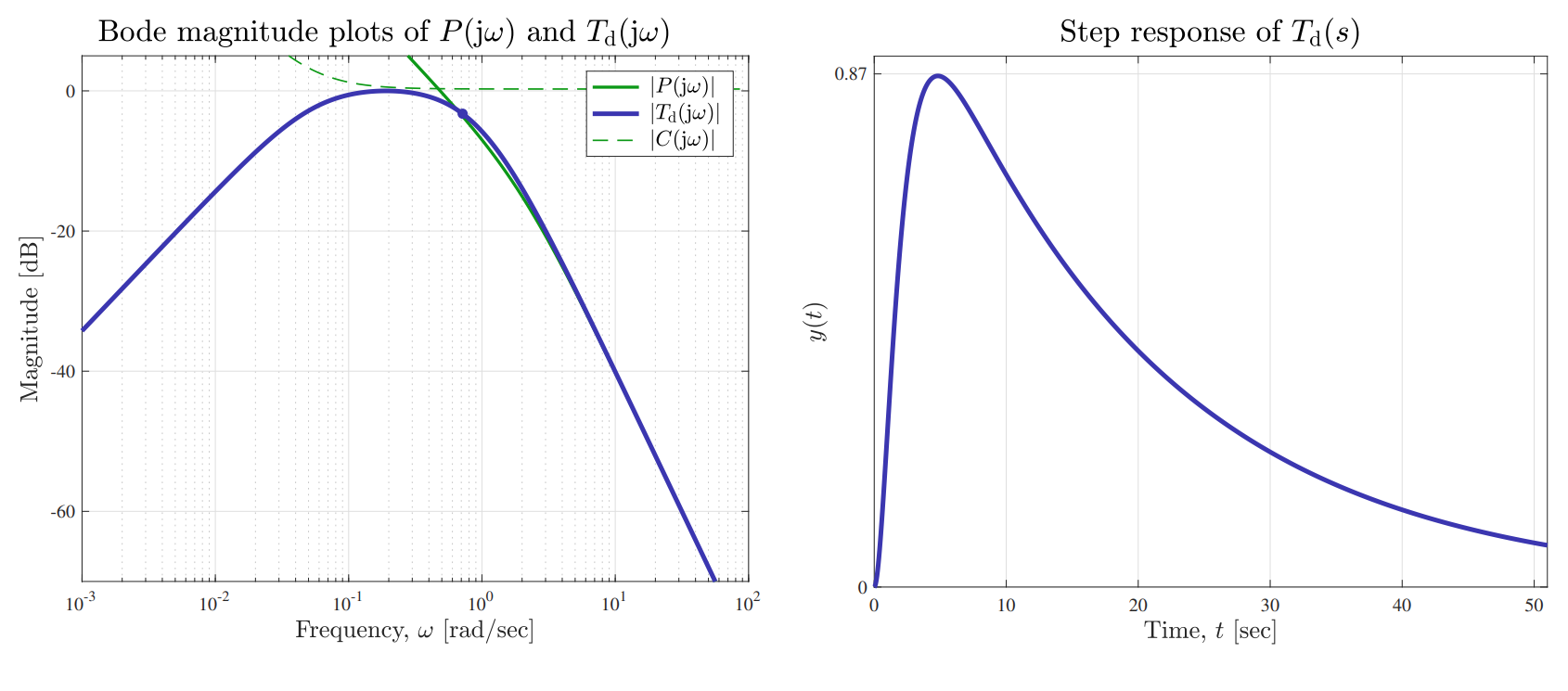
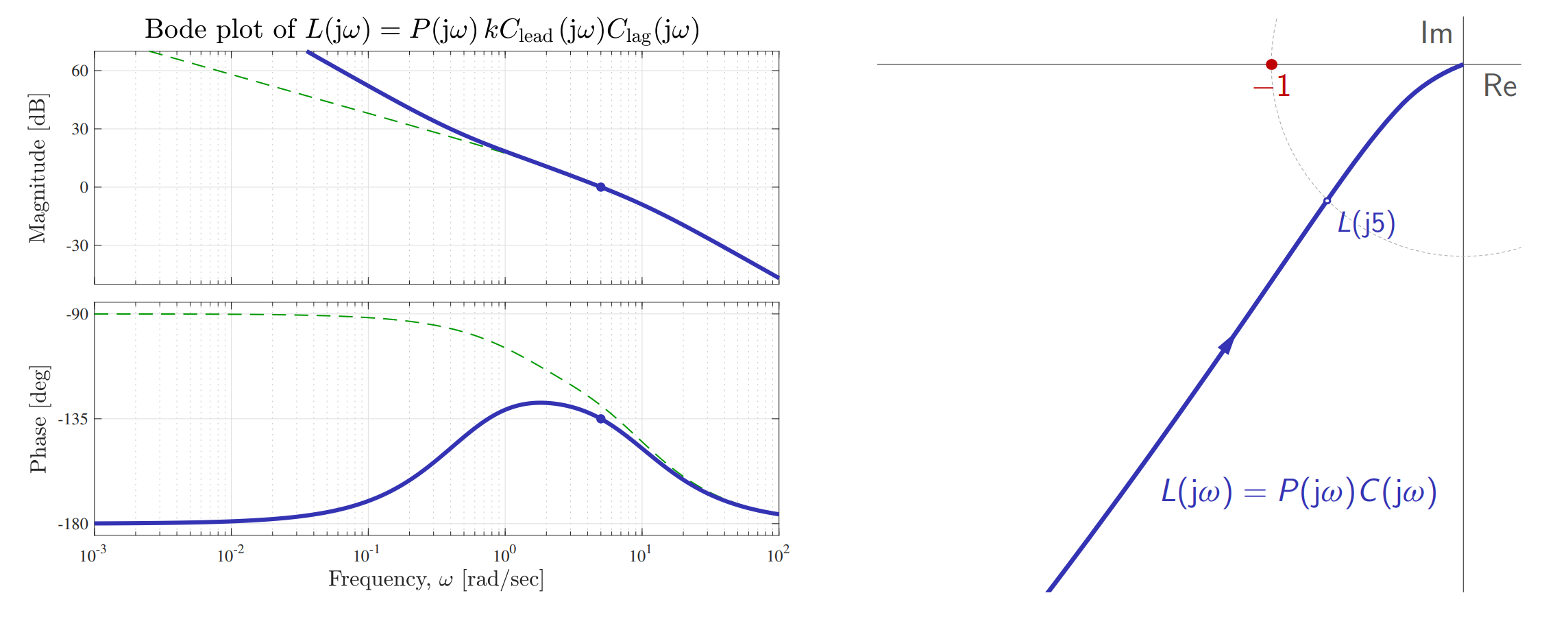
התגובות שלנו עם הבקר הסופי:
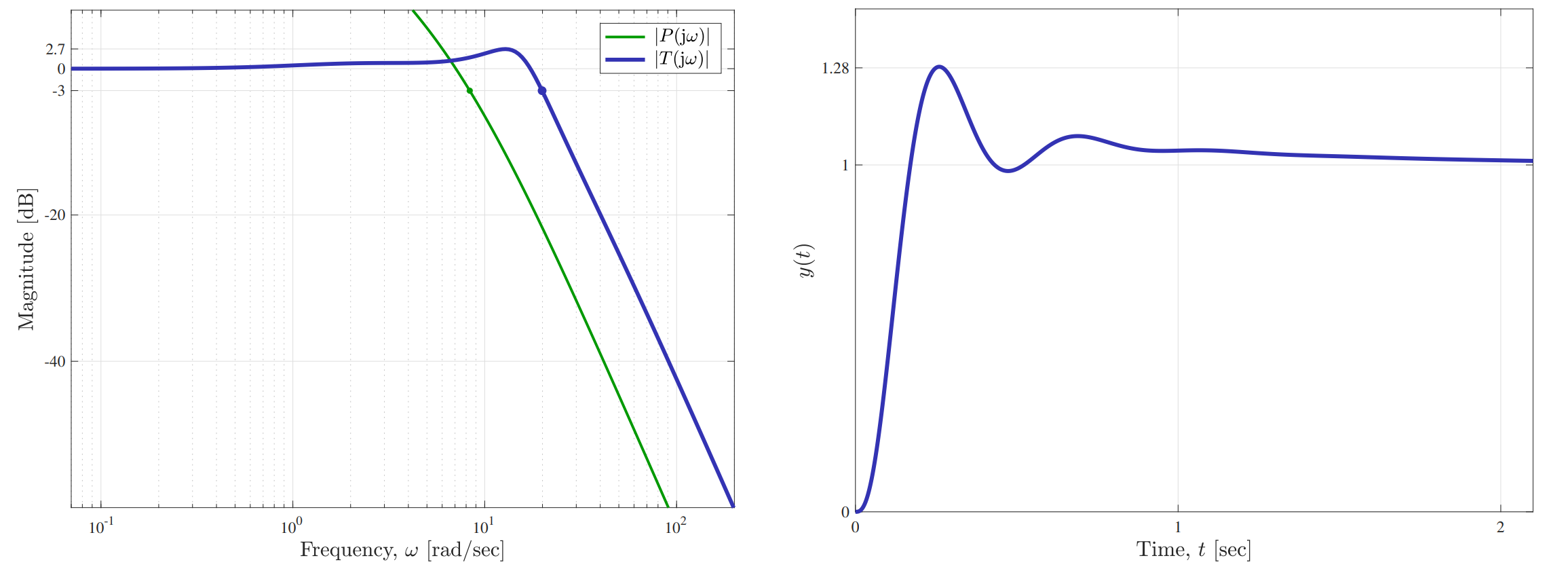
גרף בודה והתגובה של
. מתקיים .
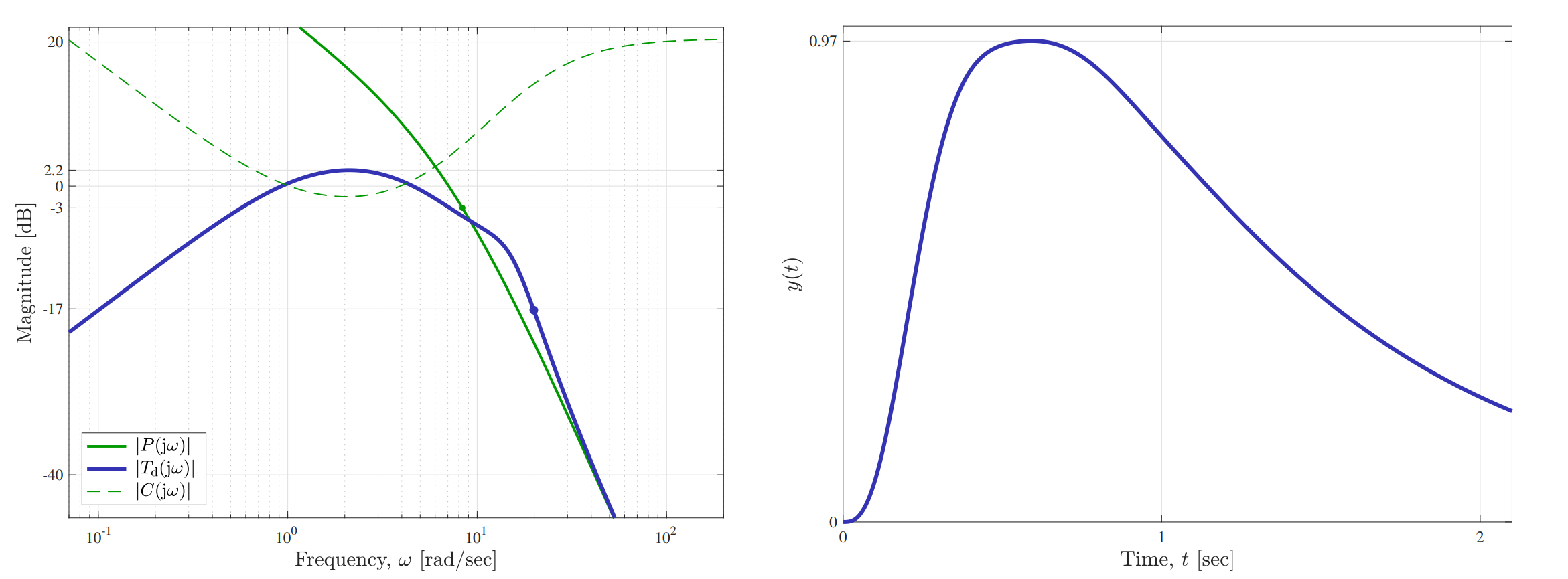
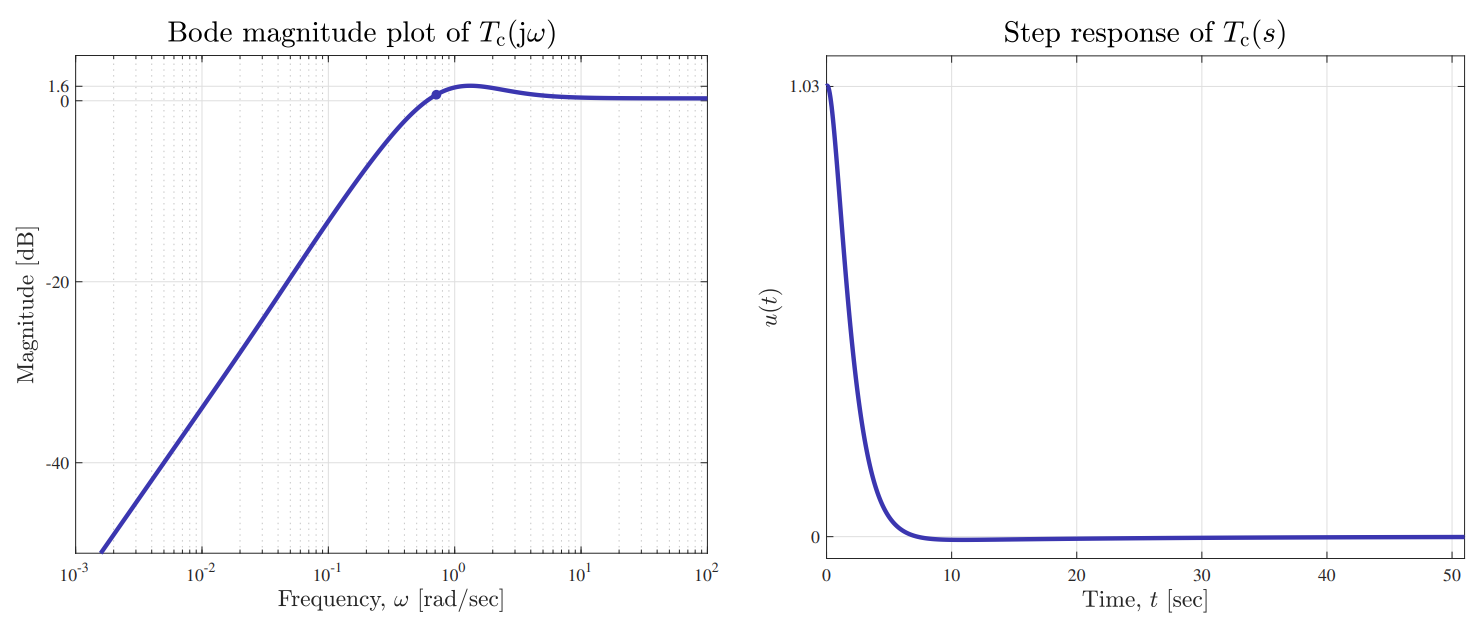
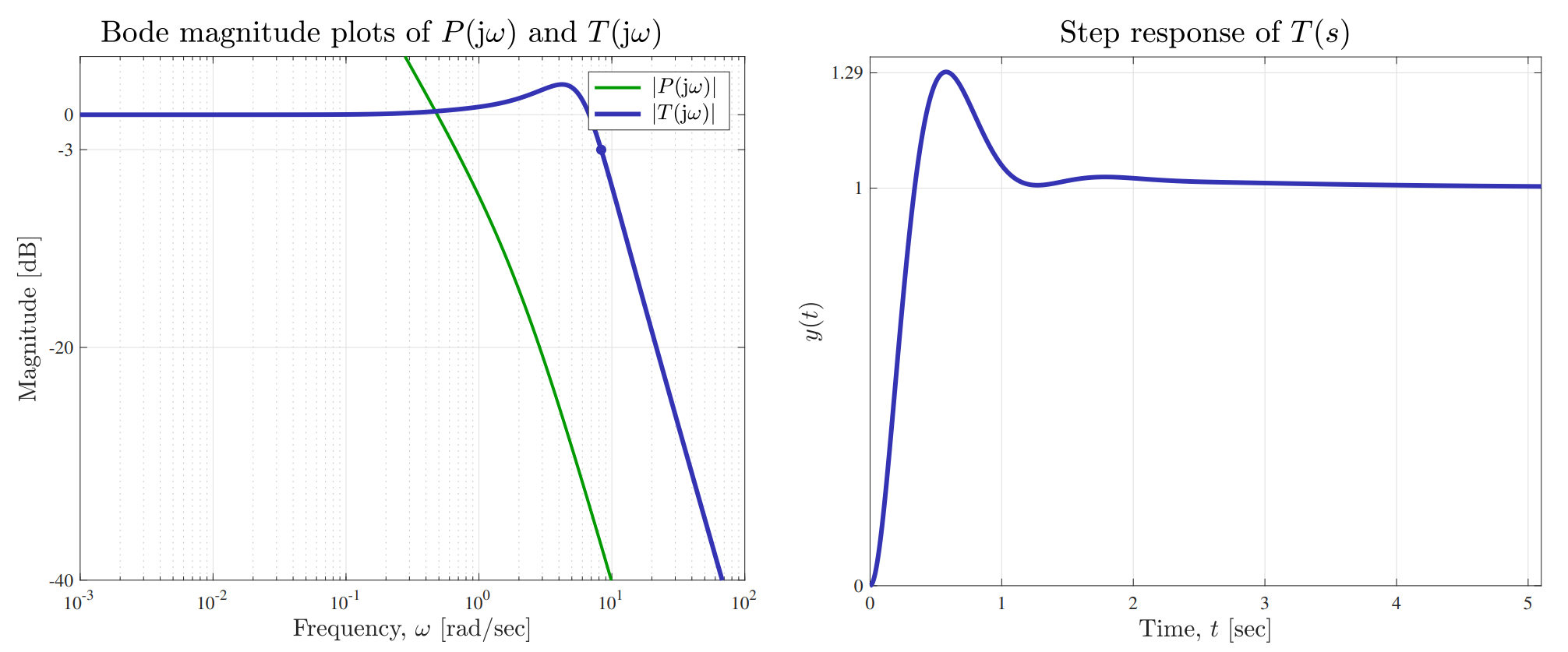
גרף בודה והתגובה של
.
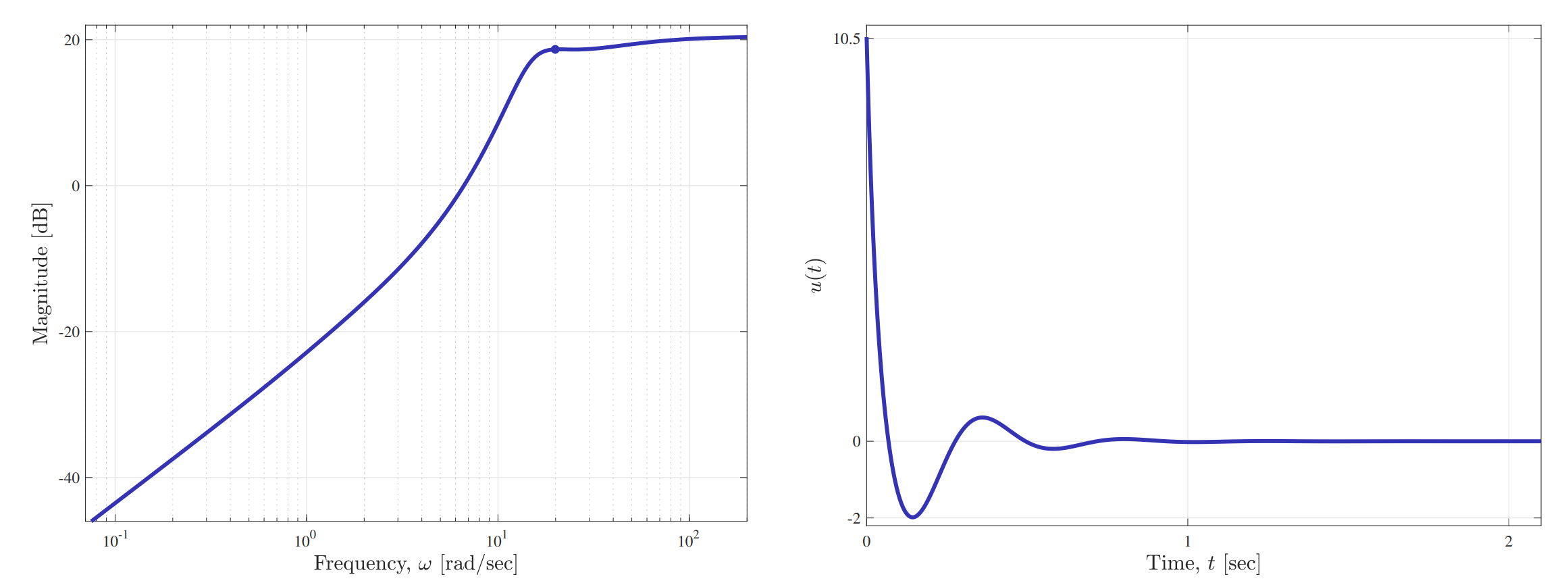
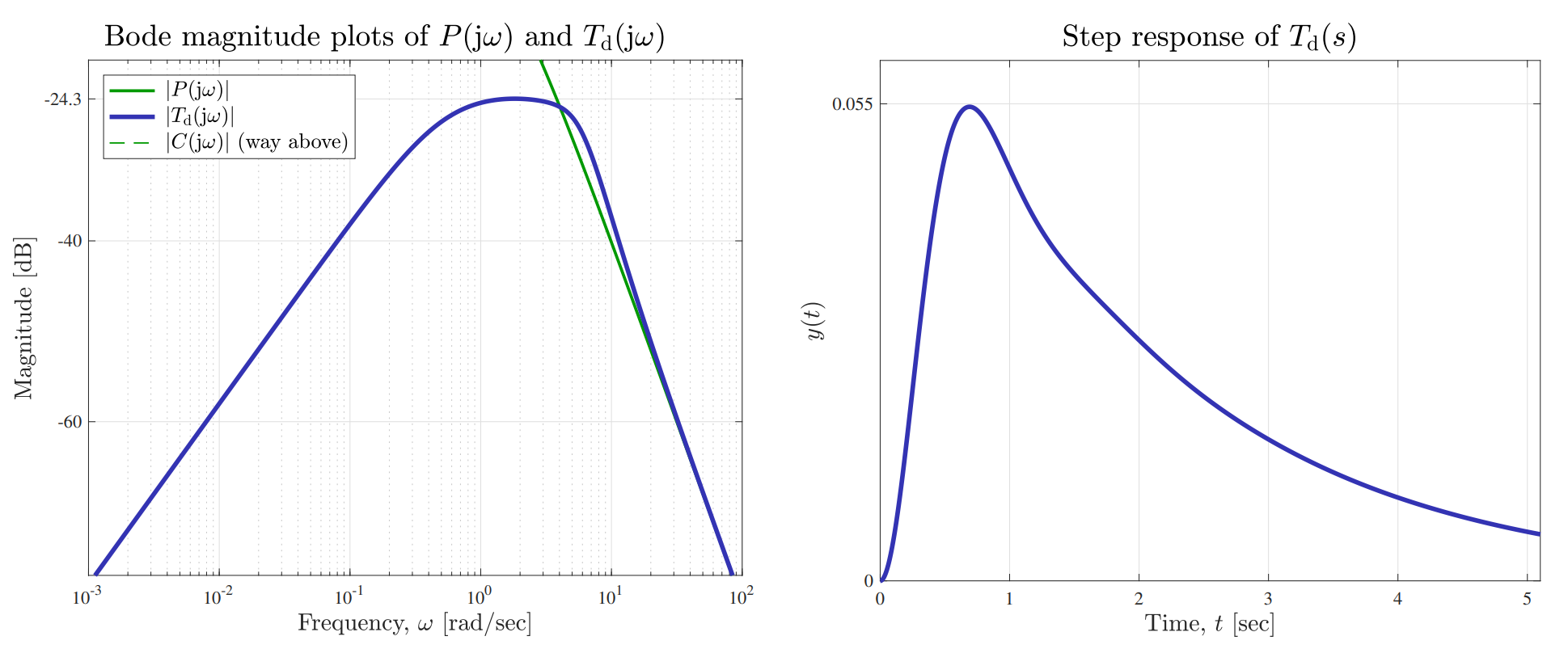
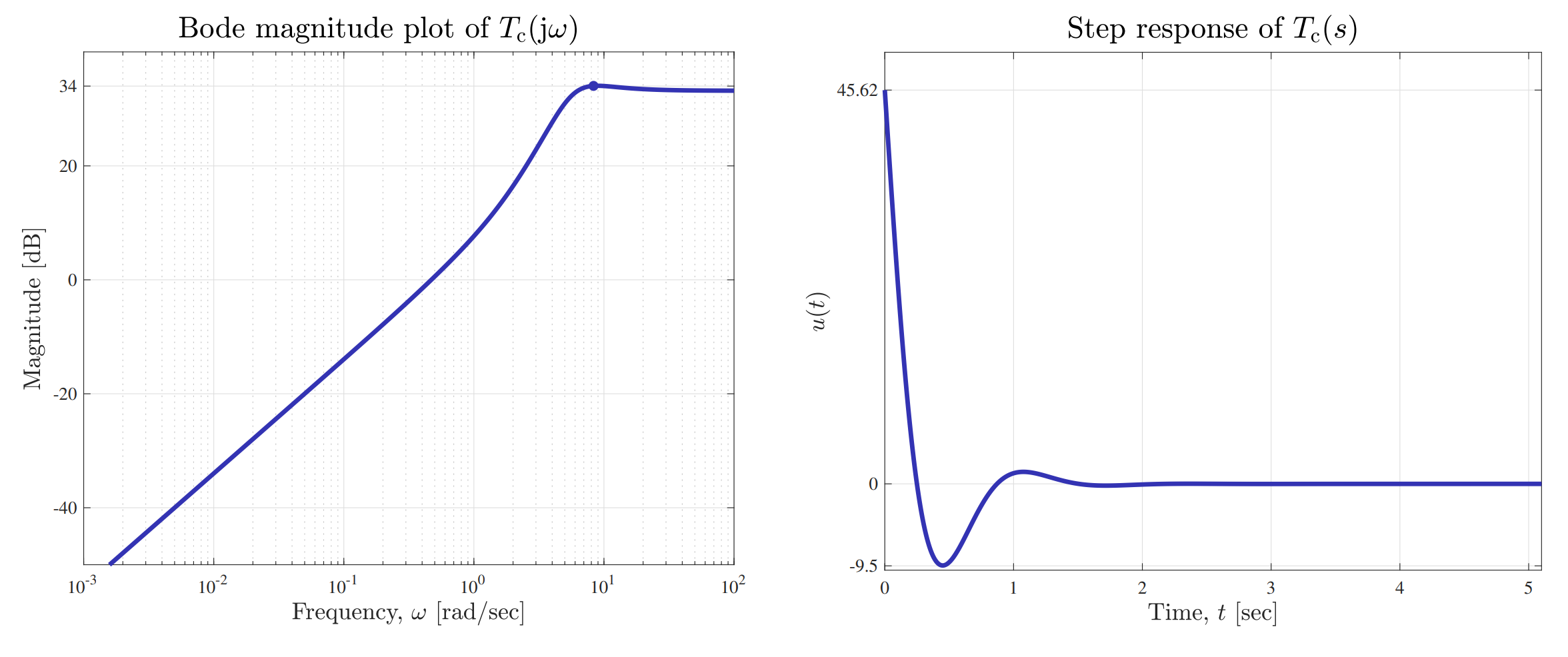
גרף בודה והתגובה של
.
טיפ לראיון עבודה (משניר):
ב-Simulink, כאשר נרצה להכניס בקר, יש בלוק שנקרא
Transfer Functionשאפשר להכניס לו את פונקציית התמסורת של הבקר הרצוי. אבל, אנו לא תמיד נרצה לעשות זאת. ניקח למשל בקר קידום:הבעיה באינטגרטור היא שהוא צובר המון שגיאות, ואם השגיאות גבוהות מדי, לא נרצה שהוא יעביר אותן לאות בקרה, כי למשל במקרה של מנוע DC הוא עלול לשרוף את המנוע. כדי שתהיה לנו שליטה יותר גבוה על הבקר, נפתח:
נחלק ב-
: נבצע התמרת לפלס הפוכה:
ניתן להכניס את קשר זה-Simulink לבלוק, ועליו ניתן לשים ערכי מקסימום ומינימום כך שלא נצבור יותר מדי שגיאות.