Basic Definitions
Continuos-Time and Discrete-Time Signals
Signals may describe a wide variety of physical phenomena. For example, consider the following simple figure:
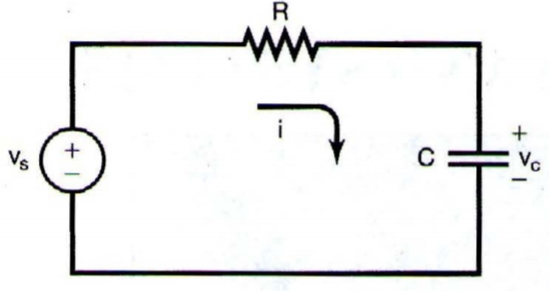
A simple RC circuit.
In this case, the patterns of variation over time in the source and capacitor voltages,
As another example, consider the human vocal mechanism, which produces speech by creating fluctuations in acoustic pressure.
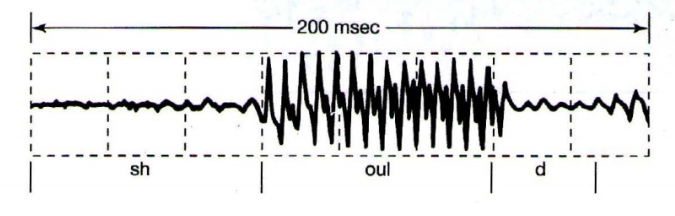
Example of a recording of speech. The signal represents acoustic pressure variations as a function of time the spoken word “should”.
Signals are represented mathematically as functions of one or more independent variables. The following figure depicts a typical example of annual average vertical wind profile as a function of height:
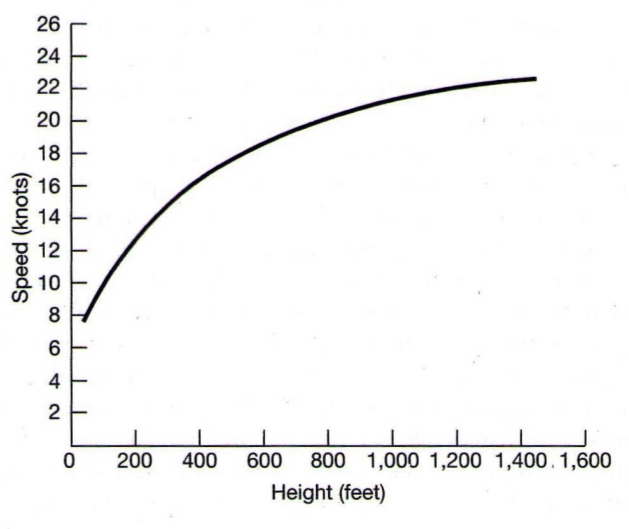
Typical annual vertical wind profile.
Throughout this book we will be considering two basic types of signals: continuos-time signals and discrete-time signals. In the case of continuous-time signals the independent variable is continuous, and thus these signals are denied for a continuum of values of independent variables. On the other hand, discrete-time signals are defined only at discrete times, and consequently, for these signals, the independent variable takes on only a discrete set of values.
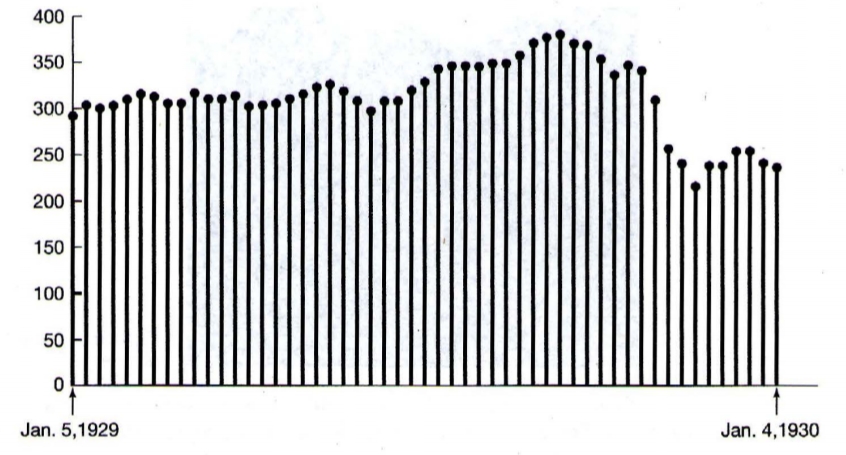
An example of a discrete-time signal: The weekly Dow-Jones stock market index from January 5, 1929 to January 4, 1930.
We will have frequent occasions when it will be useful to represent signals graphically. Illustration of a continuous-time signal
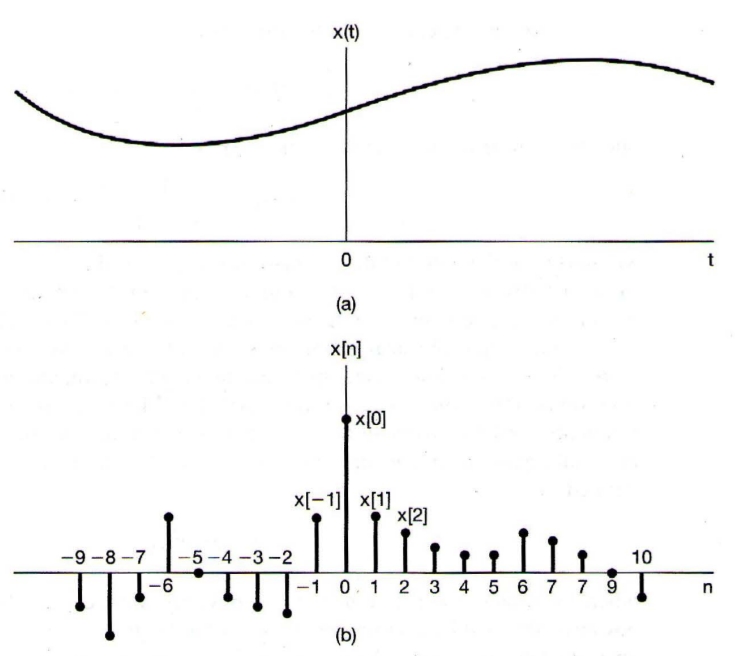
Graphical represntations of (a) continuous-time and (b) discrete-time signals. Note that the discrete-time signal
is defied only for integer values of the independent variable.
Domains and Codomains
We’ve established that signals are functions. More precisely, a signal is a function that assigns each element from its domain (מקור) one element from its codomain (תמונה)
An example of a continuous-time domain is real number domain
Notation
Signals are normally denoted by lowercase letters,
If we would like to talk about its domains, we would write for example:
which stands for:
For continuous-time signals,
For descrete-time signals,
Basic Definitions
A subset of the domain in which a signal is nonzero is called its support:
A signal
- scalar-valued if the codomain is scalar, like
- vector-valued if the codomain is a vector, like
- decaying if
- converging if
Systems as (mathematical) models
Systems are normally represented by their models, which express relations between involved signals in an abstract (math) language.
Such relation are derived under simplifying assumptions about systems and their operation conditions and are thus truthful only to a certain extent and under certain conditions. Models are derived
- from first principles/axioms
- phenomenologically
- from observing experimental input output relations
or combinations of those.
We often say “system” meaning its model, and our model is a (more or less accurate) approximation of the reality.
Example - first principle modeling
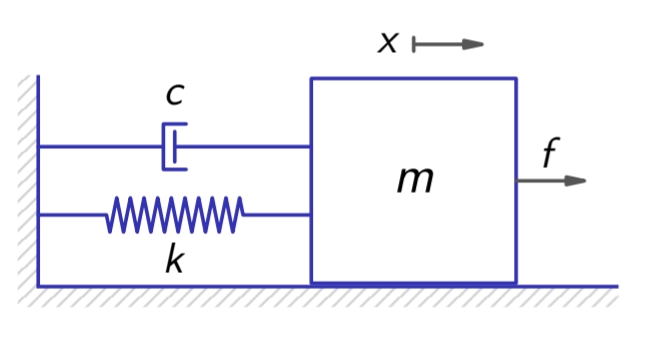
For the following system, we would like to find a mathematical model that describes the relation between the forces and the position of the mass:
We will make the following simplifying assumptions:
- spring force is proportional to position differences (Hooke’s law).
- damper force is propportional to velocity differences (viscous damping).
- neglecting friction, force misalignment, etc.
Supposing zero spring and damper forces at
, by Newton’s second law ( ): or, equivalently:
Example:
Let
be the number of susceptible individuals be the number of infection individuals be the number of removed (and immune) or deceased individuals The SIR model:
for some infection rate
and recovery rate .
State-Space Linear Systems
Attention!
The following subject is talked about in the second lecture, but I personally think it should be here, because it introduces some concepts for the introduction for Simulink.
State-Space Linear Systems
Models allow us to reason about a system and make prediction about how a system will behave. We will mainly work in “state-space form.
One of the triumphs of Newton’s mechanics was the observation that the motion of the planets could be predicted based on the current positions and velocities of all planets. It was not necessary to know the past motion. The state of a dynamical system is a collection of variables that completely characterizes the motion of a system for the purpose of predicting future motion. For a system of planets the state is simply the positions and the velocities of the planets. We call the set of all possible states the state-space.
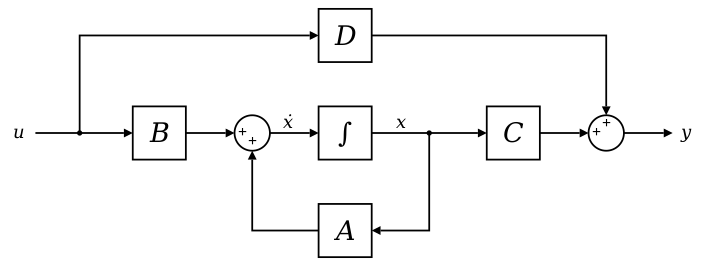
Block diagram representation of the linear state-space equations
A state-space representation is a mathematical model of a physical system specified as a set of input, output, and variables related by first-order differential equations or difference equations.
The state-space model can be applied in subjects such as economics, statistics, computer science and electrical engineering, and neuroscience.
A continuous-time state-space-linear system is defined by the following two equations:
The signals:
are called input, state, and output of the system, respectively. The first, first-order differential equation, is called the state equation and the second one is called the output equation.
The matrices
These equations express an input-output relationship between the input signal
Notes:
For the same input
, different choices of the initial condition on the state equation will result in different state trajectories . Consequently, one input generally corresponds to several possible outputs .
Terminology and Notation
When the input signal
When there is no state equation
the system is called memoryless.
When all the matrices
To keep formulas short, we can abbreviate (1) to
and in the time-invariant case, we further shorten this to
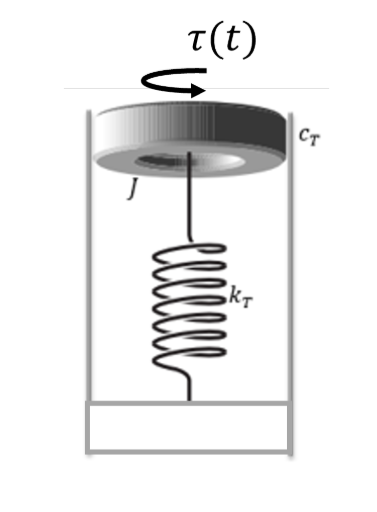
Example: Mass rotating inside a cylinder
Consider a mass rotating inside a cylinder depicted in the following figure:
Pasted image 20240610134941e moment of inertia, is attached to a torsion spring, whose torsion coefficient is . An external torque acts on the mass and friction between the mass and the cylinder is assumed to generate a viscous friction torque . The Newtonian motion equation of the mass is
, where is the net torque applied to it. In our case, Hence, we end up with:
which is the relation describing the system
.
This is a system of second-order differential equations. To get a state-space representation of the system, we can write a system of first order differential equation which represent the same dynamics of the system as the second order differential equation. After order reduction using the state vectorthe equations of the system are:
Our input to the system is
, and we can define the output of system to be the angle of the massy . The state-representation of the system will be of the form:
Block Diagrams
It is convenient to represent systems by block diagrams:
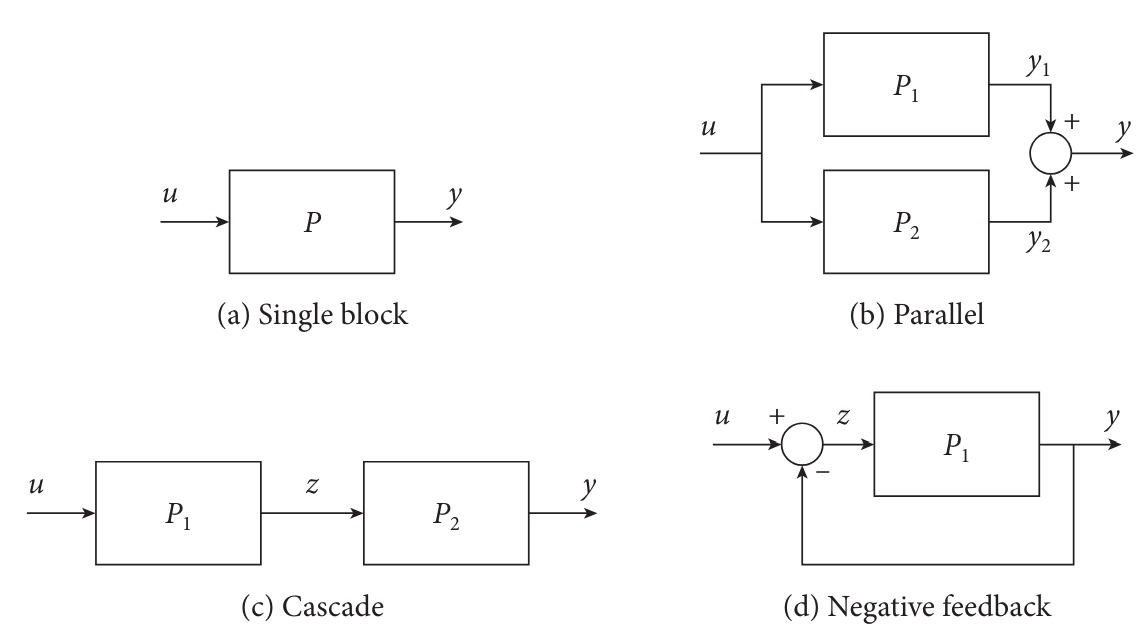
Block diagrams.
The two-port blocks in the figure represent a system with input
Attention!
Although not explicitly represented in the diagram, one must keep in mind the existence of the sate, which affect the output through the initial condition.
Interconnections
Many real systems are built as interconnections of several subsystems. One example is an audio system, which involves the interconnection of a radio receiver, compact disc player, or tape deck with an amplifier and on or more speakers. By viewing such a system as an interconnection of its components, we can use our understanding of the component systems and of how they are interconnected in order to analyze the operation and behavior of the overall system.
In the block diagrams figure, in each case there are two interconnected LTI systems that can be written as
The general procedure to obtain the state-space for an interconnection consists of stacking the states of the individual subsystems in a tall vector
In
The parallel interconnection is responsible for the block diagonal structure in the matrix
In
In
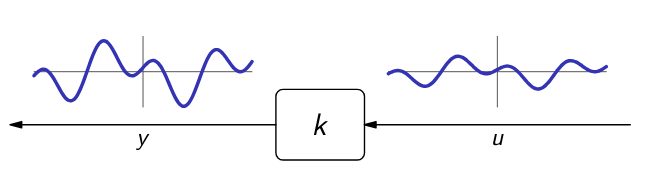
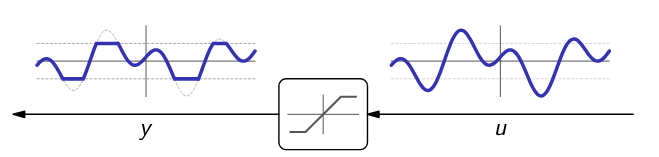
Standard Systems
- Gain systems map their input
- Saturation system map their input
- Integrator systems map their input
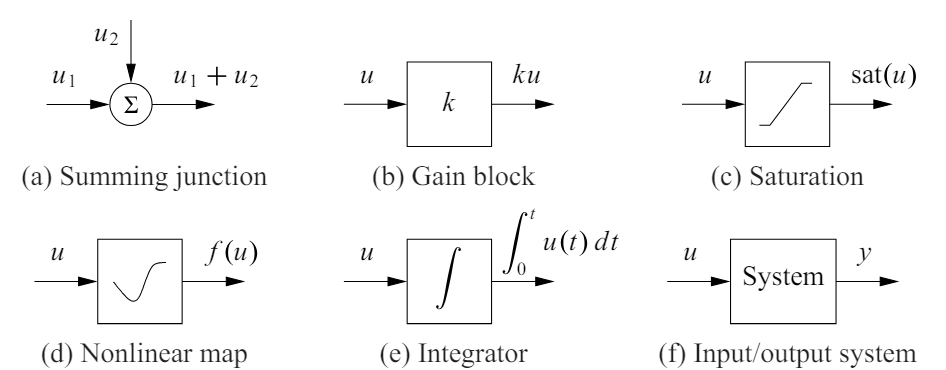
Standard block diagram elements. The arrows indicate the inputs and outputs of each element, with the mathematical operation corresponding to the blocked labeled at the output.
Notes:
Some texts defined the begining of time at
, and some at .