רזונטור לינארי חד-ממדי
נביט במערכת מסה-קפיץ-מרסון הבאה:

איור 7.1: רזונטור לינארי חד-ממדי.
משוואת התנועה של מערכת זו נתונה ע”י:
ניתן לרשום אותה באופן אל-ממדי (ראו רטט):
כאשר:
הערה:
הקשר בין
ו- הוא , כאשר הוא יחס הריסון.
הפתרון של (7.2) הוא סכום של הפתרון ההומוגני ופתרון פרטי.
פתרון הומוגני:
נביט במשוואה (7.2) בצורתה ההומוגנית,
הפתרונות של משוואה זו הם:
-
אם
נשים לב שהארגומנטים בשני האקספוננטים הם שליליים.
אם אין מהירות התחלתית:וגם:
אם לעומת זאת, אין תזוזה התחלתית, אז
-
אם
-
אם
נוכל לסמן
מאחר וכל קומבינציה לינארית של שני פתרונות אלו יכולים להיות פתרונות למשוואה ההומוגנית הכללית, נוכל לבחור לכפול כל אחת מהם פי
פתרון פרטי:
נניח פתרון מהצורה
נציב בחזרה ב-(7.2) ונקבל:
נסיק ש-
האמפליטודה של
והפאזה היא:
כך ש:
נוכל להגיע ל-(7.12) גם בלי מספרים מרוכבים. נכתוב את (7.2) כ:
נציע פתרון מהצורה:
נציב ב-(7.15):
נוציא גורם משותף:
לאחר העברת אגפים:
כדי שמשוואה זו תתקיים בכל זמן נתון, הרכיב בכל אחד מהסוגריים המרובעים חייב להיעלם. זאת משום ש-
נסיק מהסוגריים המרובעים ש:
ולכן:
נציב בסוגריים המרובעים השניים ב-(7.19) ונקבל:
נפתור עבור
תהודה ברזונטור חד-ממדי
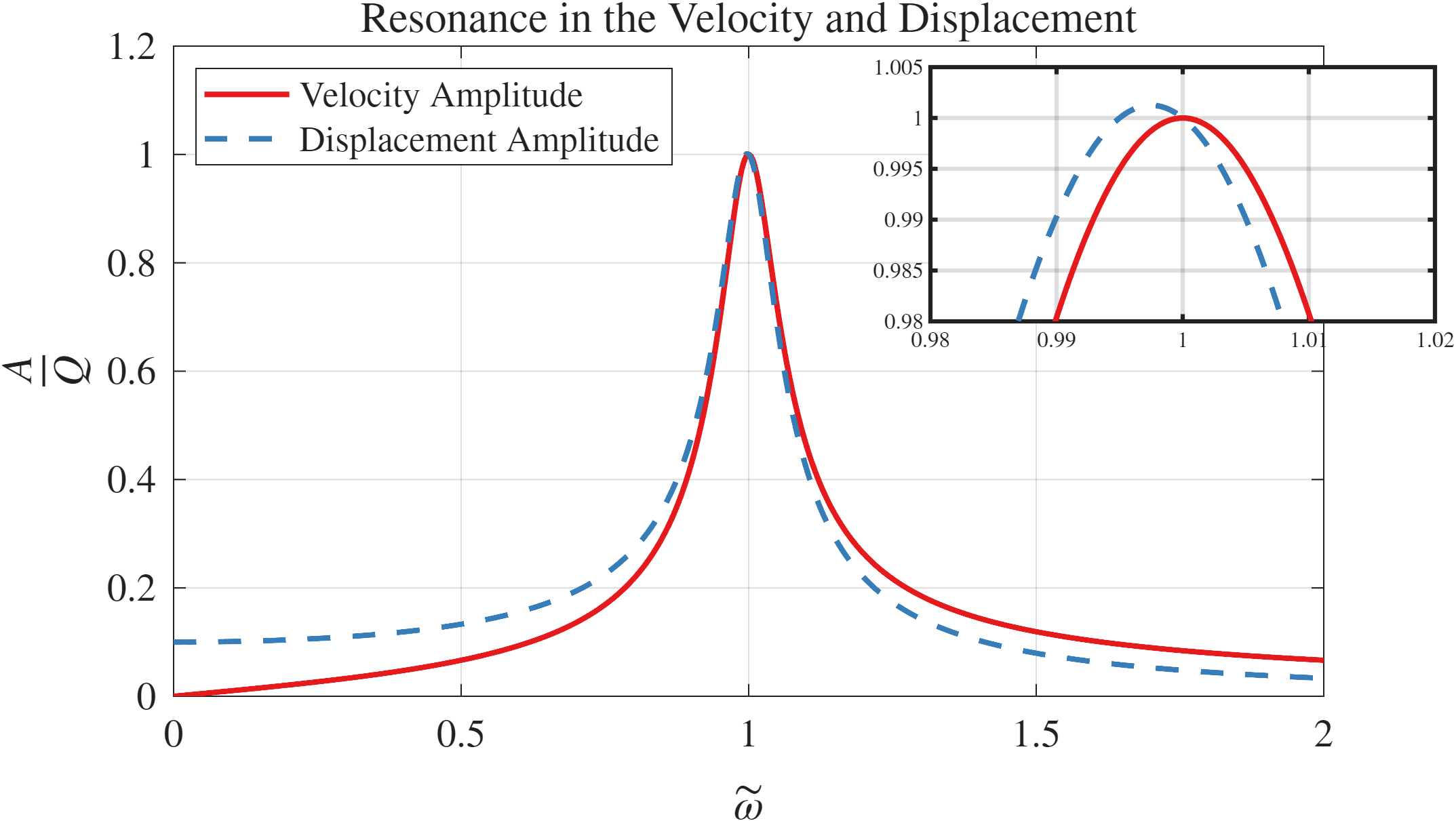
איור 7.2: משוואה (7.12) עבור
. בנוסף לכך, משורטט האמפליטודה של המהירות, שגודלה הוא כפי שמופיע ב-(7.14b).
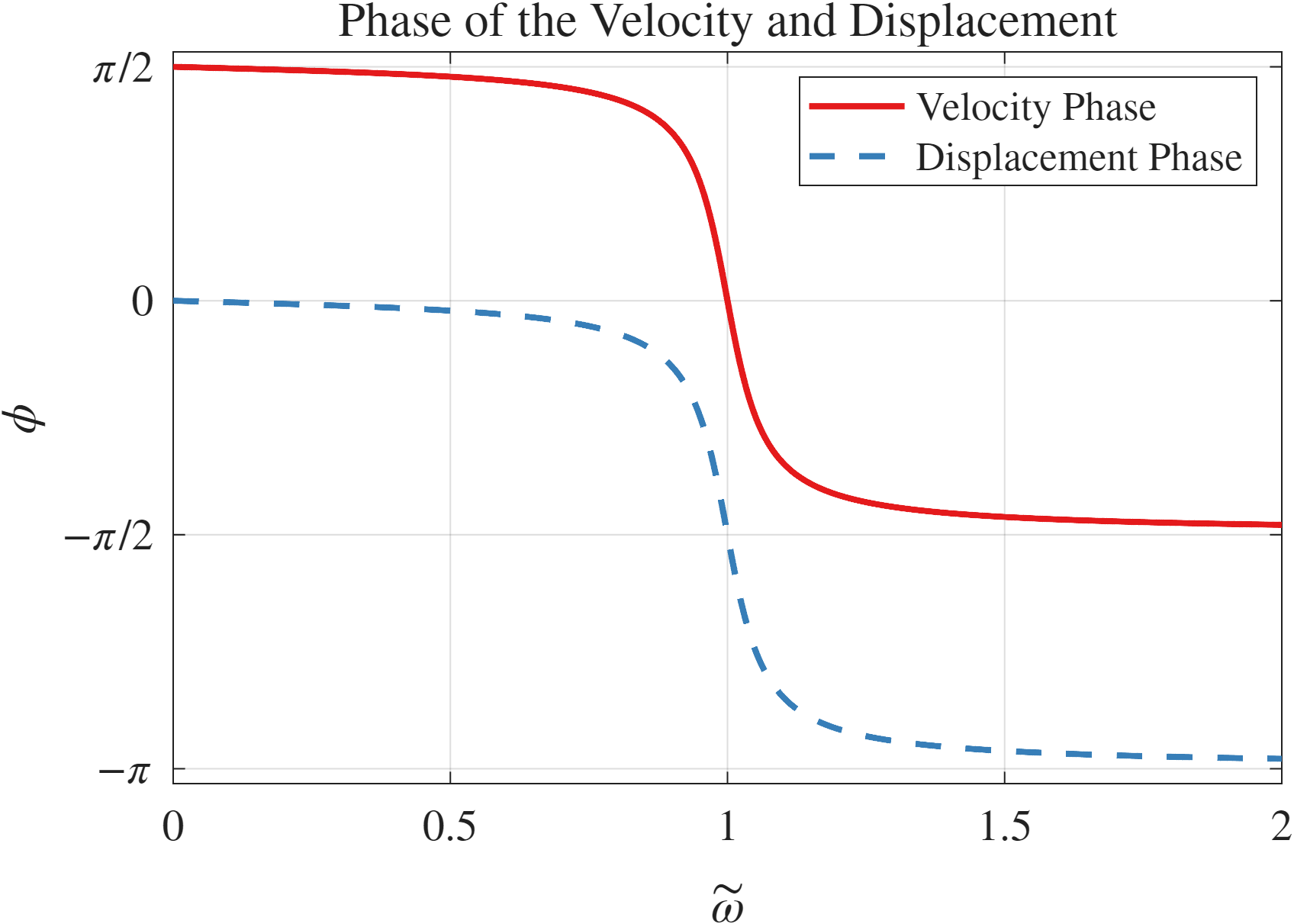
איור 7.3: פאזה של המיקום לפי (7.13) עבור
. ב-(7.14b) ניתן לראות שהפאזה של המהירות נמצאת ב- מוקדם יותר.
הפאזה כאשר
ניתן לראות שבאזור הפסגות של המיקום והמהירות, הפאזה מתחילה להיעלם. מבט קרוב יותר מראה ש:
- המהירות מגיעה למקסימום כאשר
- נדמה כי גם ההזזה המנורמלת וגם המהירות המנורמלת שווים ל-
נבחן כעת את תוצאות אלו ע”י ניתוח אנליטי.
שיא ההזזה מתקבל כאשר
נשים לב שהמהירות הזוויתית הזאת היא:
- טיפה יותר קטנה מ-
- טיפה יותר גבוה מ-
שיא ה-מהירות מתקבל כאשר
ע”י הצבה של (7.24) לתוך (7.13) אנו מוצאים שבתהודה זו:
זה אומר שבתהודה (התהודה במהירות) הפאזה של המהירות יחסית לכוח היא
ע”י הצבת (7.24) לתוך (7.12) נמצא כי בתהודה (התהודה במהירות) ההזזה והמהירות הם:
אם נחשב את שיא ההזזה ב-
שיא זה אמנם יותר גדול מ-
- עבור מערכות עם
- התהודה במהירות (
במונחים של גדלים ממדיים, נקבל:
מה שאומר שגם ההזזה וגם המהירות בתהודה פרופורציונליים לאמפליטודת הכוח ההרמוני, והם פרופורציונליים באופן הפוך למקדם הריסון.
בתהודה, גם הכוח המניע וגם המהירות, הם הרמוניים יחידים, והם בפאזה. אז לאורך כל מחזור, כוח הריסון שווה לכוח המניע:
נציב לתוך (7.2) ונקבל:
במונים ממדיים:
כלומר, נשארנו עם מערכת פשוטה של מסה-קפיץ בעירור חופשי, שבאופן טבעי רוטטת ב-
חדות התהודה
נביט כעת ברוחב פס, בו האנרגיה במערכת היא חצי מהשיא הערך שלה בתהודה. בתהודה, האנרגיה הקינטית המנורמלת היא פרופורציונלית לריבוע אמפליטודת המהירות:
פתרון:
לכן, רוחב-הפס של התדירות הזוויתית היא:
את חדות התהודה אנו מגדירים:
הערה:
הערכים
ו- הם לא אותו הדבר (אין להם את אותה המשמעות)! יצא לנו מקרה פרטי של רזונטור לינארי חד-ממדי.
מהצבה של (7.38) לתוך (7.13) נקבל את הפאזות:
כלומר, רוחב-הפס הוא בין
מקדם איכות
בחלק מהספרות, מגדירים את מקדם האיכות כיחס בין האנרגיה השמורה והאנרגיה המתפזרת במערכת - בתדר התהודה:
במקרה של רזונטור לינארי חד-ממדי, האנרגיה המקסימלית במחזור אחד היא או
נסיק ש:
אבל ההגדרה הזאת של

איור 7.4: רזונטור לינארי חד-ממדי סימטרי, עם pre-stress.
מערכת זו שקולה בכל הפרמטרים שלה למערכת באיור 7.1. אבל, למערכת באיור 7.2 ניתן לבצע pre-stress ע”י הזזה של העוגנים הרחק אחד מן השני. פעולה זו לא תשפיע על הקשיחות, מסה, או ריסון, אבל כן תשפיע על האנרגיה המקסימלית האגורה במערכת.
ניתן להראות שאם המערכת לא לינארית, או אפילו מסדר שני, אז השקילות הזאת בין
רזונטור אלקטרוסטטי מקבילי
נביט כעת במערכת אלקטרוסטטית ונבחן את התגובה הדינמית שלה:

איור 7.5: רזונטור אלקטרוסטטי מקבילי.
כבר בחנו את ההתנהגות של מערכת זו בשיווי משקל במשוואה (1.18) וראינו כי:

איור 7.6: עקומת equilibrium curve של המערכת.
בהזנחת שדות שוליים, משוואת התנועה של מערכת זו היא:
ניתן לרשום את משוואת תנועה זו במונחים אל-ממדיים:
כאשר:
בעבר בחנו לעומק את התגובה הסטטית של המשפעל האלקטרוסטטי. עבור
המצב הסטטי יציב בטווח
נציב לתוך (7.45), עם פיתוח טיילור לשני משתנים
התדירות הטבעית המנורמלת האלקטרומכנית
כך שהיא מוגבלת ב-
התגובה במצב מתמיד של המשפעל נתונה ע”י:
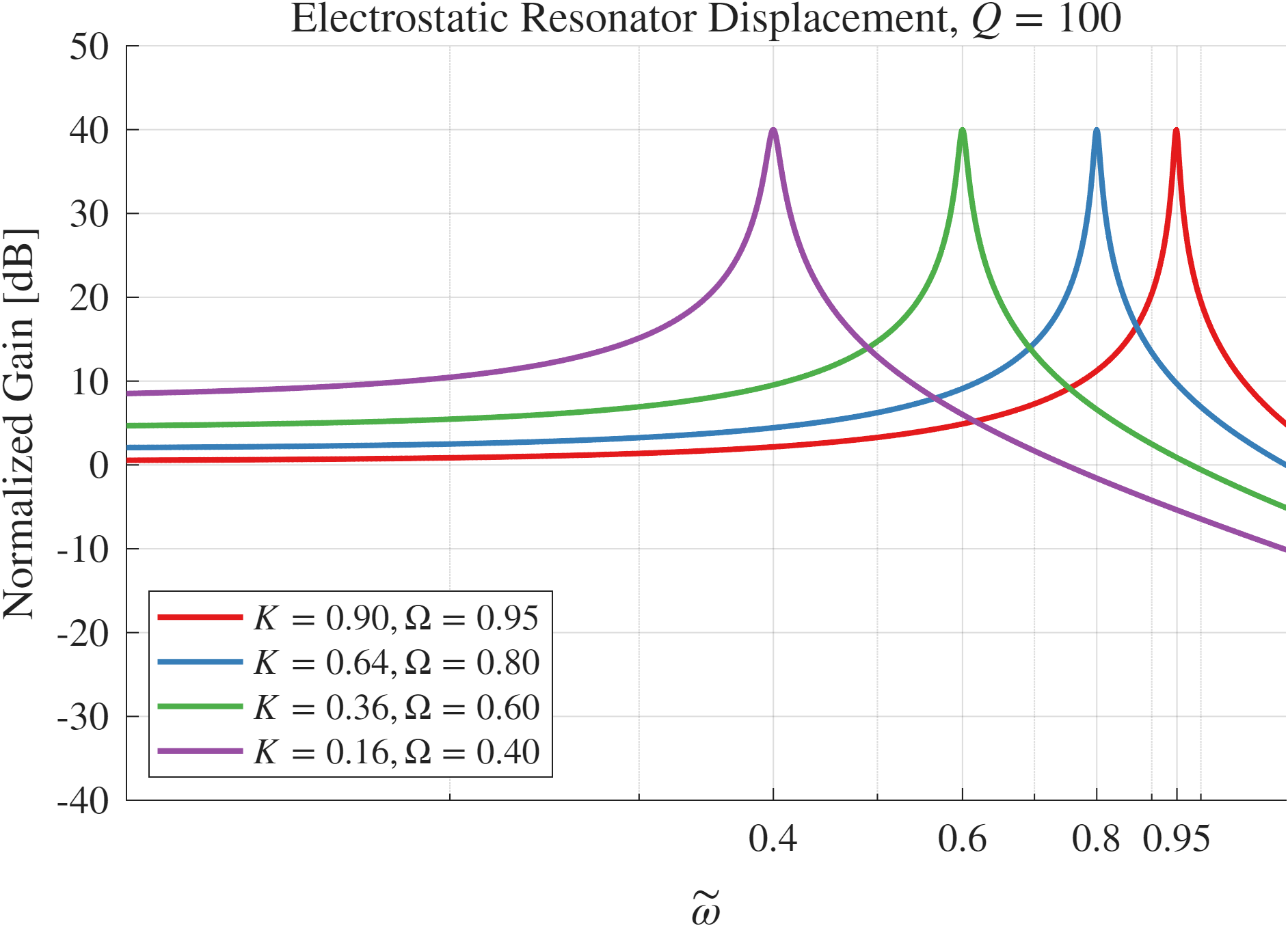
איור 7.7: אמפליטודת ההזזה במצב מתמיד של רזונטור אלקטרומכני עם
ועומסי DC שונים . ההגברה המנורמלת היא .
הערה:
שיא ההגברה הוא
כי ההגברה המנורמלת מגיעה לשיא של בתהודה. בתהודה ( ), ההגברה היא: בדציבלים:
. כפל ב- בנורמליזציה משווה את כל השיאים ל- , ללא תלות ב- .
Feedthrough
מה אם נוסיף מד-זרם על הפלטה התחתונה?

רזונטור אלקטרוסטטי מקבילי עם מד-מתח.
מגזירה של האנרגיה במערכת, הכוח האלקטרוסטטי הוא:
לרוב, מניעים את המערכת עם
לכן, כתוצאה מהכוח הממוצע,
אם הרכיב המחזורי של הכוח הוא
נסיק כי התהודה מתרחשת ב-
הקיבול יהיה גם מהצורה הזאת:
לפי
לכן הזרם יהיה:
כאשר
לרכיבים ב-(7.60) יש שמות!
- הרכיב
- הרכיב
הזרם התנועתי נובע מהתנועה המכנית של הרזונטור: כאשר המסה תונדת, המרווח משתנה, הקיבול משתנה (
ה-feedthrough הוא זרם פרזיטי הזורם דרך הקיבול הסטטי (
למעשה, נוכל להבחין בתופעת ה-אנטי-תהודה (anti-resonance) באיור 7.7 הנובעת מביטול חלקי בין הזרם התנועתי (בפאזה הפוכה) לבין ה-feedthrough.
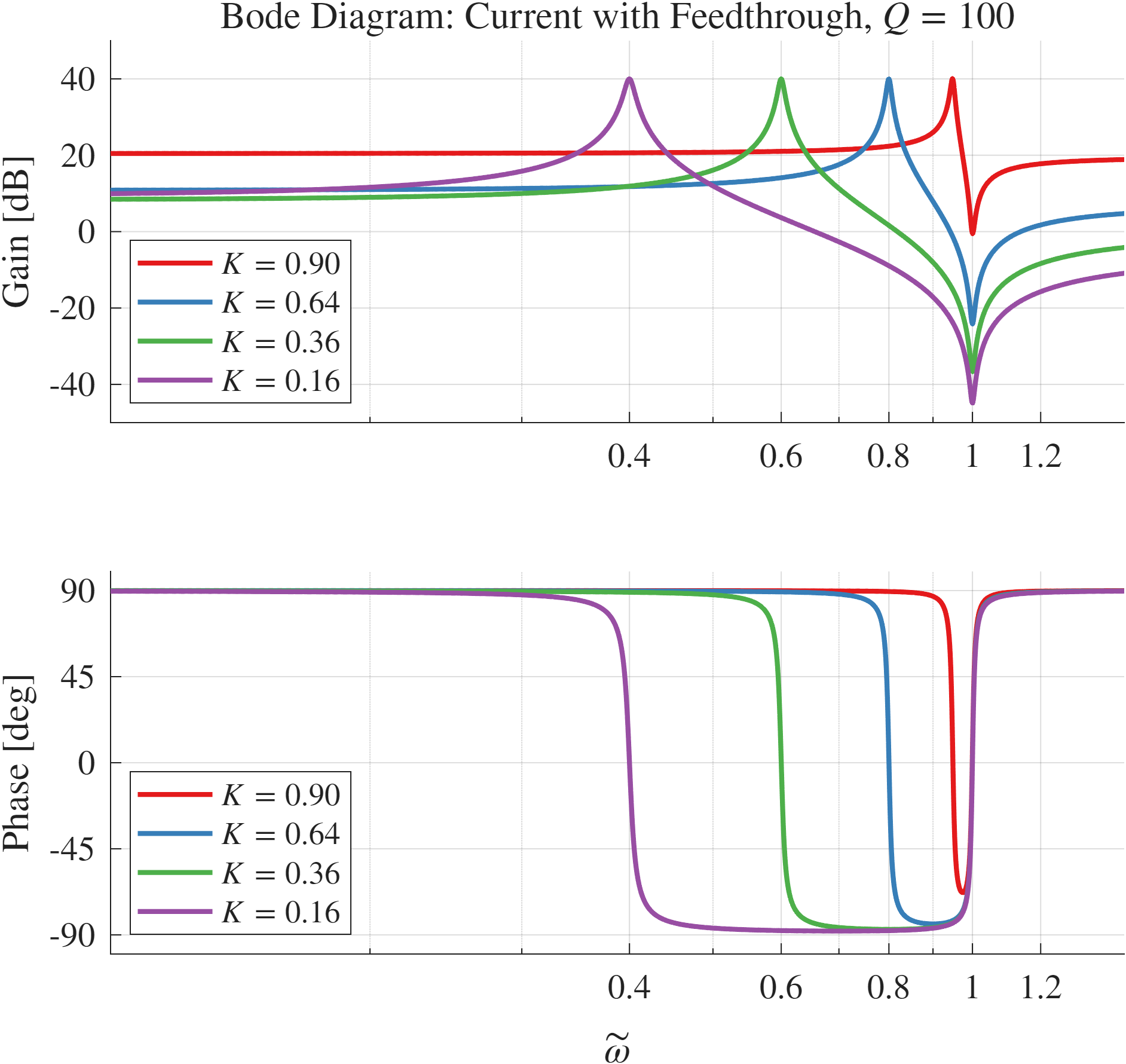
דיאגרמת בודה של מגבר ופאזה של הזרם הכולל עבור רזונטור א-סימטרי,
. תדר התהודה יורד עם , בעוד תדר האנטי-תהודה קבוע ב- .