בפרקים קודמים חקרנו את השיווי משקל של גוף ע”י בידודו בעזרת דג”ח ומשוואות שיווי המשקל. ישנם גם בעיות בהן גופים יכולים לזוז ביחס אחד לשני, ובמצב זה יכולים להיות מספר מצבי שיווי משקל אפשריים. במצבים כאלו, כמו בפיזיקה, קל לנו יותר להשתמש בעקרונות אנרגיה ועבודה כדי למצוא פתרונות לבעיה הנתונה. שיטה זו נקראת שיטת העבודה הוירטואלית.
עבודה
עבודה של כוח
בפרק זה ניעזר במונחי העבודה והאנרגיה מפיזיקה. בעיקר:
ועבור העבודה הכוללת:
הערות:
- נעסוק כעת רק בכוחות משמרים.
עבודה של מומנט טהור
בנוסף לעבודה הנעשית ע”י כוחות, מומנטים טהורים גם יכולים לבצע עבודה.
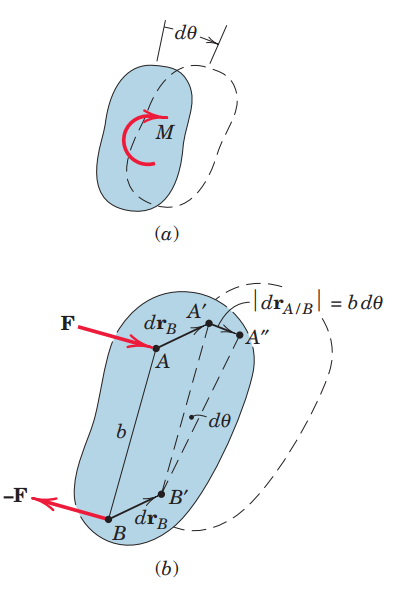
המומנט
נפרק את הרוטציה הזאת לשני חלקים:
- הזזה של הגוף
- סיבוב סביב נקודה כלשהי שנסמן ב-
בזמן שינוי אינפיטסימלי (מאוד קטן) במיקום הגוף, הקו
לכן העבודה הנעשית ע”י
כלומר, בזמן ההזזה מ-
לעומת זאת, בזמן הרוטציה
כאשר
העבודה של מומנט היא חיובית אם
עבודה וירטואלית
נעסוק כעת בחלקיק שהנקודת שיווי משקל שלו נקבעת ע”י כוחות שפועלים עליו. כל שינוי שרירותי קטן במיקום שלו
הכוח שנעשה ע”י כוח
ההבדל בין
שיווי משקל
נציג כעת את תנאי שיווי המשקל על חלקיק וגוף, בביטויים של עבודה וירטואלית.
שיווי משקל של חלקיק
נביט בחלקיק הבא הנתון תחת מספר כוחות:
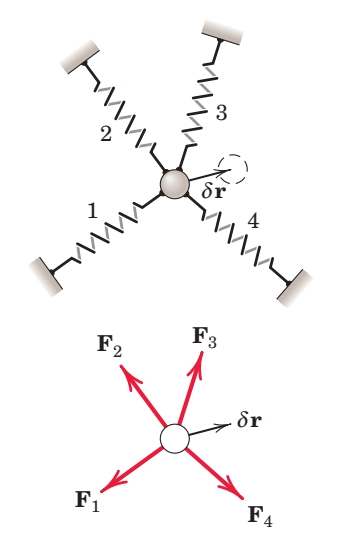
אם נזיז את החלקיק בהעתק וירטואלי
אנו יודעים שבשיווי משקל ש-
אנו בעצם אומרים שעבור חלקיק בשיווי משקל, העבודה של כל תזוזה קטנה שלו, שלא מפרה את אילוצי המערכת (כוחות, מומנטים) - מתאפסת.
בגדול, העיקרון של אפס עבודה וירטואלית של חלקיק יחיד לא מפשטת את הבעיה, כי המשוואות
שיווי משקל של גוף
אם העבודה הוירטואלית של כל חלקיק בשיווי משקל מתאפסת, אז קל להסיק שעבור כלל גוף קשיח בשיווי משקל, גם העבודה הוירטואלית מתאפסת.
כאשר נחשב את
גם כאן המשוואה
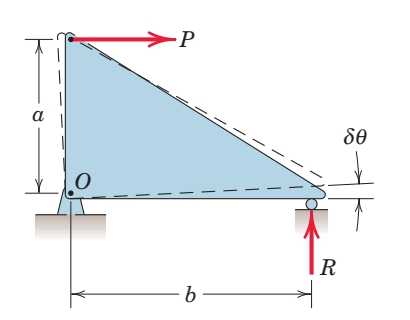
ננסה למצוא את
אבל זה זה אותה המשוואה שהיינו מקבלים אם היינו מחשבים מומנט סביב הנקודה
שיווי משקל של מערכות אידיאלית של גופים קשיחים
נעסוק כעת במערכות אידיאלית. מערכות אלו בנויות מ-2 או יותר גופים קשיחים המחוברים יחד ע”י חיבורים מכניים שלא מסוגלים לבלוע אנרגיה תחת מתיחה או לחיצה, ושהחיכוך קטן מספיק כך שנוכל להזניח אותו. דוגמה לכך היא המערכת הבאה:
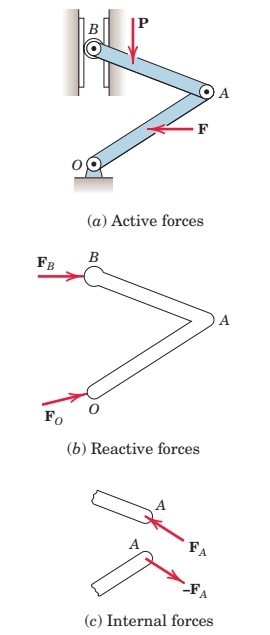
נסווג את הכוחות לשלושה קטגוריות:
- כוחות מוכתבים הם כוחות המסוגלים לבצע עבודה וירטואלית תחת העתקים וירטואלים אפשריים. בשרטוט שלנו אלו כוחות
- כוחות תגובה הם כוחות הפועלים בסמכים קבועים במקום כאשר שום העתק וירטואלית קורית בכיוון של הכוח. כוחות אלו לא פועלים תחת העתק וירטואלי. בשרטוט שלנו הכוח
- כוחות פנימיים הם כוחות בקשרים בין האלמנטים/מוטות. תחת כל תזוזה במערכת, הכוח השקול (הכולל) המתבצע ע”י הכוחות הפנימיים הוא תמיד אפס. הסיבה לכך היא שהכוחות הפנימיים תמיד מגיעים בזוגות של כוחות שווים ומנוגדים בכיוונם. בשרטוט ניתן לראות זאת בכוחות
עיקרון העבודה הוירטואלית
שמנו לב כי הכוחות המוכתבים הם היחידים שמבצעים עבודה וירטואלית במערכת. נוכל כעת לומר את המשפט הבא:
משפט:
העבודה הוירטואלית המתבצעת ע”י כוחות מוכתבים במערכת מכנית אידיאלית בשיווי משקל היא אפס לכל ההעתקים (שינויים) וירטואליים שלא מפרים את אילוצי המערכת.
כאשר באילוצי המערכת הכוונה בהגבלת התנועה ע”י הסמכים.
כאשר אנו משתמשים בעיקרון זה, אין לנו צורך לשרטט דג”ח מלא של המערכת, אלא רק להתייחס לכוחות המוכתבים. בשרטוט הקודם, נתחייס רק ל-
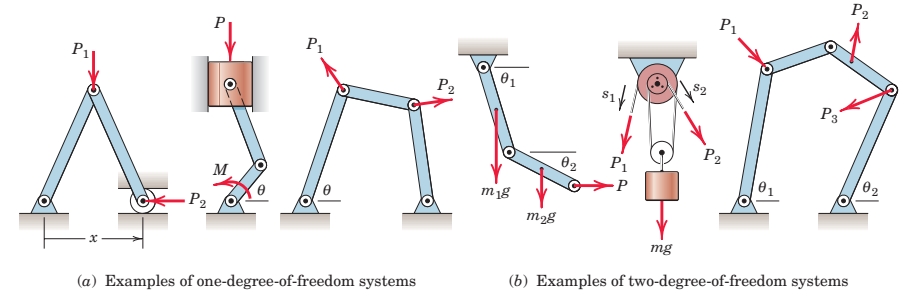
דרגות חופש
מספר דרגות החופש של מערכת מכנית היא מספר הסקלרים המינימליים שדרושה כדי לתאר באופן מלא את המערכת.
נפעיל עיקרון העבודה הוירטואלית
דוגמאות:
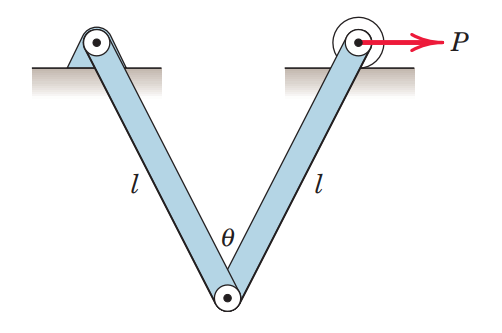
- כל אחד מהמוטות באיור הבא בעלי מסה
ואורך , כאשר הם נתמכים ע”י הסמכים הנתונים. עבור כוח , מצאו את הזווית עבורה ישנה שיווי משקל.
פתרון:
הכוחות המוכתבים הם כוח הכבידה הפועל על שני המוטות והכוח. כל שאר הכוחות הם כוחות תגובה וכוחות פנימיים ולכן הם לא מבצעים עבודה.
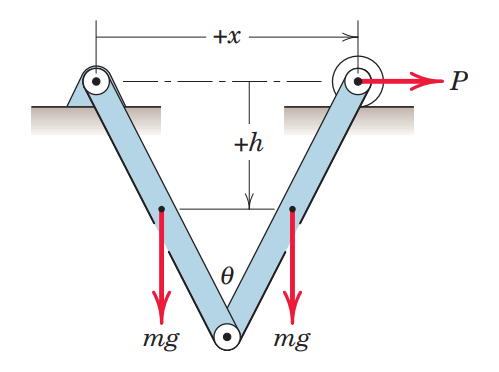
לפי עיקרון העבודה הוירטואלית, כלל העבודה של כלל הכוחות המוכתבים היא אפס לכל הזזה וירטואלית תחת אילוצי המערכת. נסמן את השינויים הוירטואליים במערכת ונקבל כי:
שימו לב כי בחרנו את הכיוונים החיוביים שלו- בכיוון הכוחות שמבצעים עבודה לאורכם.
נציג את השינויים ב-ו- ע”י המשתנה . מגאומטרייה פשוטה: השינוי
כתגובה לשינוי , היא גזירה של משוואה זו: זוהי לא גזירה לפי
! לכן לא קיבלנו מהירות באגף שמאל, אלא ביטוי המתאר כמה משתנה כאשר אנו משנים את ב- .
באותו אופן, עבור: נציב בחזרה ב-(1):
ונקבל:
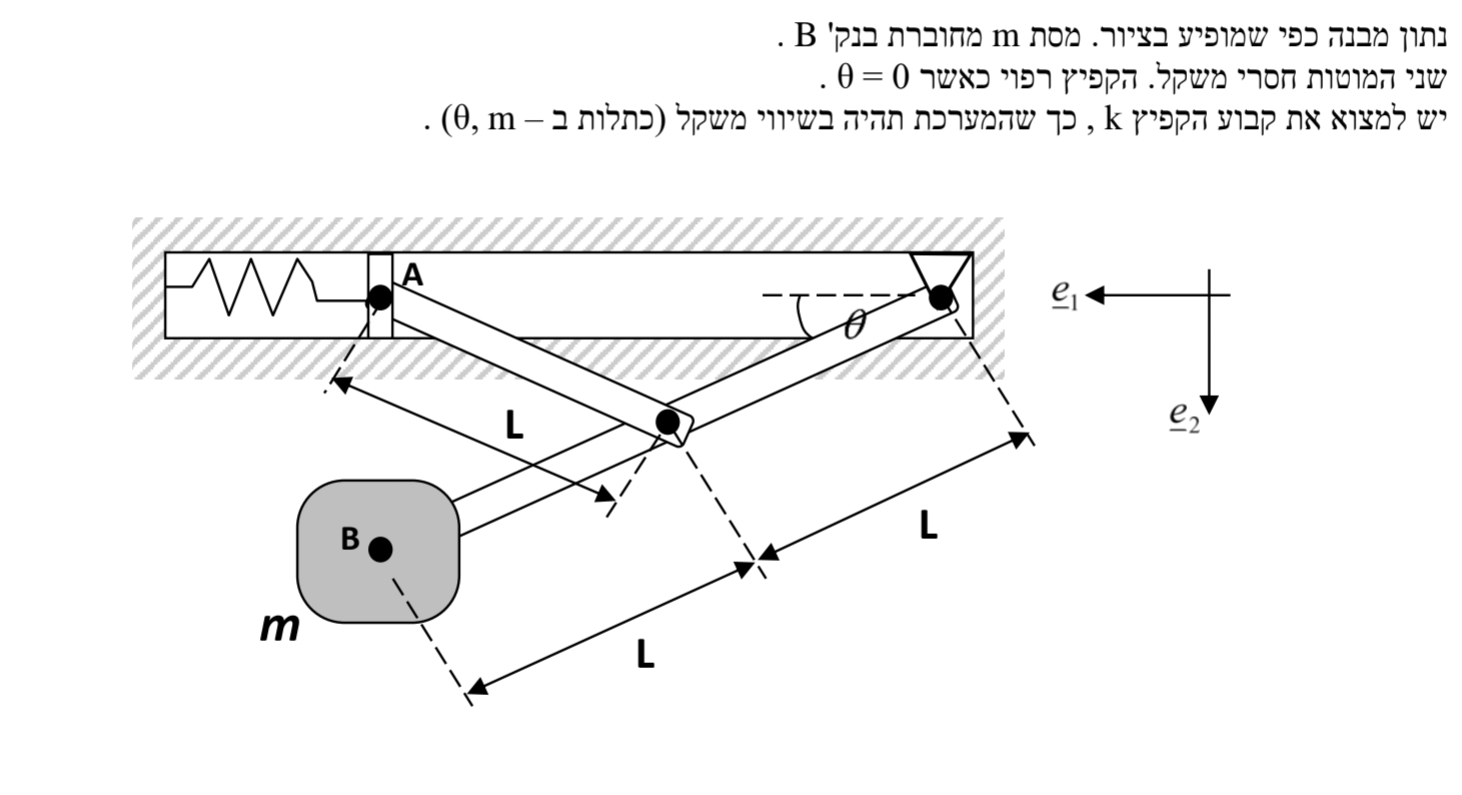
תרגילים:
- נתון:
פתרון:
נשרטט דג”ח:

יש לנו דרגת חופש אחת,
נמצא את תלות - נתון:
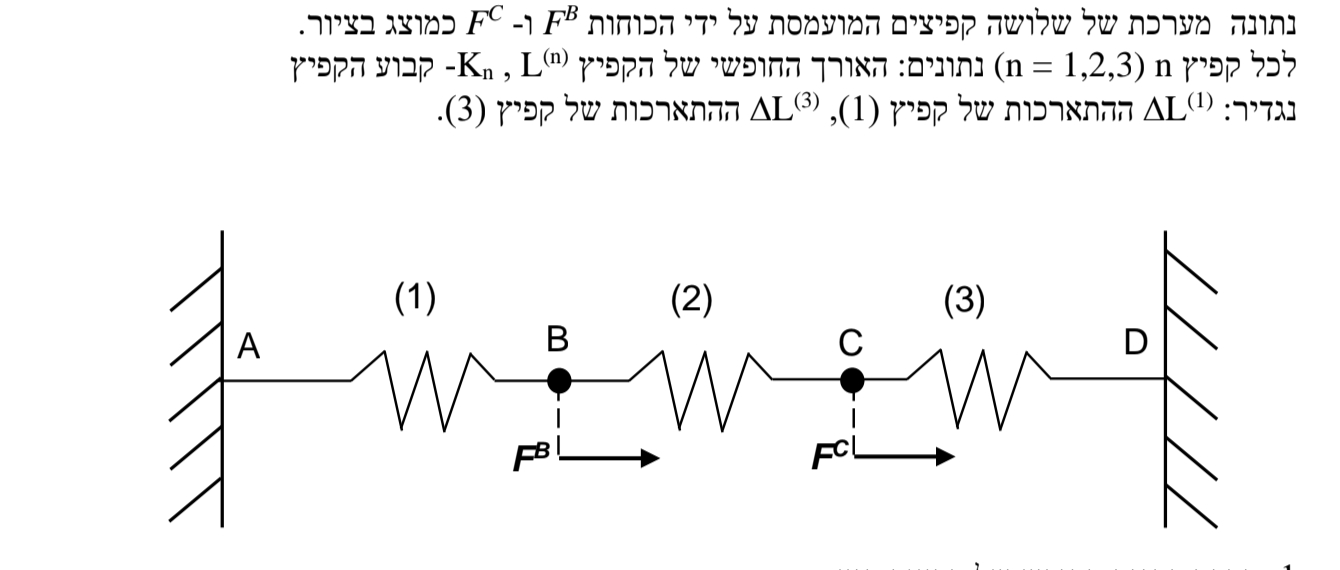
מצאו את העבודה הוירטואלית שנעשית ע”י כלל הכוחות.
פתרון:
נשים לב שסכום התארכות הקפיצים תמיד מתאפסת כי האורך הכולל לא יכל לגלוש מעבר לאורך
נסדר, ונקבל את שתי דרגות החופש שלנו
יש לנו את הכוחות:
נבחר
נגזור:
לפע עיקרון העבודה הוירטואלית: