מבוא
סימונים ומוסכמות
נמשיך עם אותם הסימונים ממוצקים 2, כולל ההדלתא של קרונקר ועיקרון הסכימה של איינשטיין.
לעומת זאת, נעבור להדגשת הוקטורים והמטריצות, במקום סימון קו תחתון:
את וקטור המיקום של נקודה
טרנספורמציה בין מערכות של וקטורי בסיס
כמו במוצקים 2, נרצה לעבור בין מערכות צירים שונות. אז למשל, עבור שתי מערכות צירים
כאשר את הרכיבים במערכת נחשב לפי:
את הסקלרים
תנועה עקמומית במישור
כדי לבנות שפה משותפת לבעיות דינמיקה, אחד מהכלים הבסיסיים שנרצה לפתח הוא תיאור תנועה של חלקיק, שלרוב יהיה לאורך עקומה (במישור או במרחב).
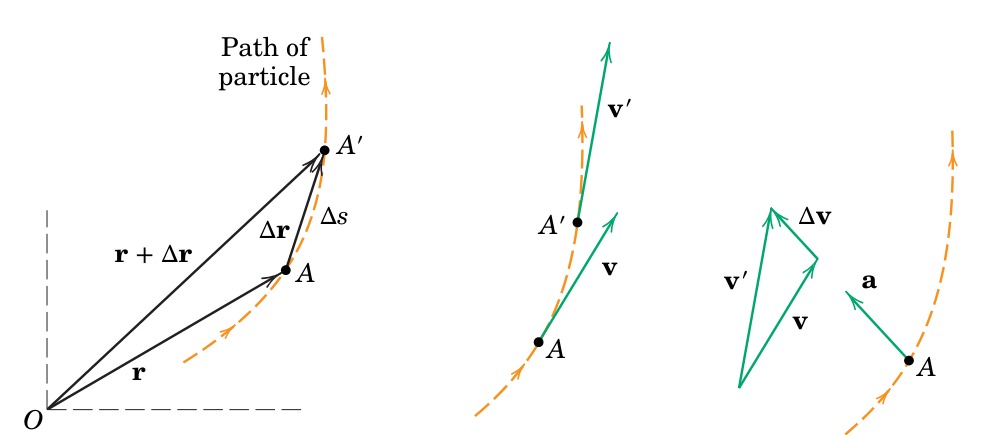
תנועה של חלקיק לאורך עקומה מישורית (Meriam et al., 2018).
בזמן
האורך האמיתי שהחלקיק עבר הוא הסקלר
בתנועה בליסטית ותנועה מעגלית בפיזיקה ראינו את הנוסחאות המתפתחות עבור חלקיק הנמצא תחת תנאים מסוימים, ועשינו זאת בעזרת הקשרים הדיפרנציאליים:
וגם לפעמים בעזרת שימוש במערכת צירים שונה.
הערה:
הכיוון של
שואף לכיוון המשיק לעקומה ככל ש- שואף לאפס. לכן, המהירות תמיד תשיק לעקומה. לגבי התאוצה , נשים לב שהיא לא בהכרח בכיוון המשיק לעקומה, או הנורמלי אליו. אבל, הרכיב הנורמלי שלו תמיד ייפנה למרכז העקמומיות של העקומה.
נביא דוגמאות לשימוש בקואורדינטות שונות.
קואורדינטות נורמליות ומשיקיות
השימוש בקואורדינטות נורמליות ומשיקות לתיאור תנועה של חלקיק היא מאוד נפוצה. קואורדינטות אלו מאפשרות תיאור טבעי לתנועה העקמומית של חלקיק, ולרוב הכי ישירות ופשוטות לשימוש.
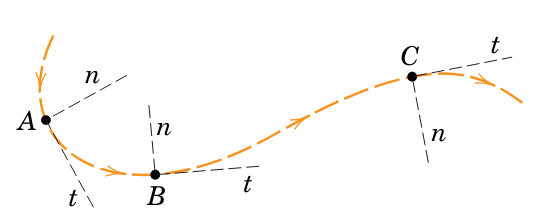
תנועה של חלקיק לאורך עקומה מישורית, והכיוונים של הנורמל והמשיק בנקודות
לאורך העקומה. הכיוון החיובי של בכל נקודה תמיד ייבחר לתוך אמצע העקמומיות. לכן, לאורך העקומה הוא עשוי לשנות כיוון (Meriam et al., 2018).
נרצה כעת להשתמש בקואורדינטות
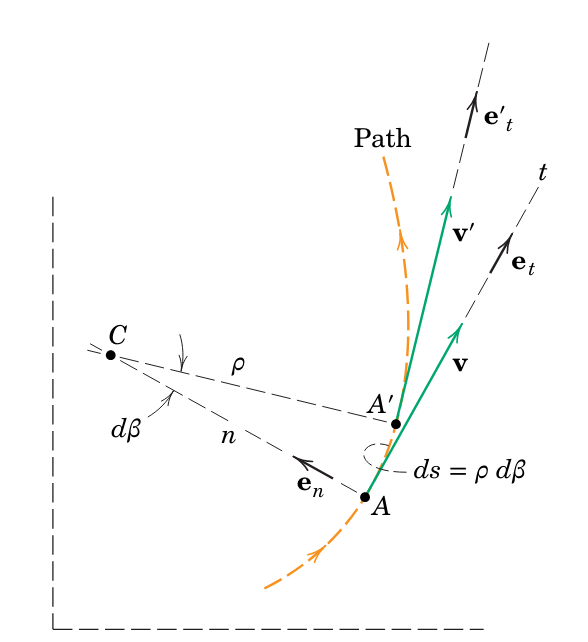
תנועה של חלקיק בפרק זמן
(Meriam et al., 2018).
לאחר פרק זמן
לפיכך, גודל המהירות נתון ע”י
לכן, נוכל לרשום את המהירות של החלקיק באופן הבא:
התאוצה של החלקיק נתונה ע”י:
תאוצה זו מתארת גם השינוי בגודל המהירות וגם השינוי בכיוונו. נגזור את
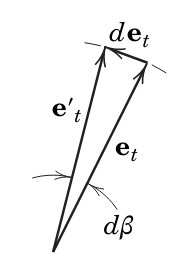
לוקטור היחידה
יש נגזרת לא אפסית כי הכיוון שלו משתנה (Meriam et al., 2018).
הוקטור
נחלק ב-
הערה:
נשים לב שהנגזרת (לפי זמן) של וקטור יחידה היא לא בהכרח גם וקטור יחידה. הדבר היחיד שאנו יודעים לומר עליה הוא שהיא ניצבת אליו.
נציב בביטוי שקיבלנו עבור התאוצה, כאשר נשים לב ש-
כאשר:
נוכל לסכם זאת בצורה הבאה:
פירוק הוקטורים לרכיב הנורמליים והמשיקים (Meriam et al., 2018).
באיור אנו יכולים לראות את וקטור המהירות
הערה:
שוב, הרכיב הנורמלי של התאוצה
תמיד לכיוון מרכז העקמומיות.
תנועה מעגלית
תנועה מעגלית היא מקרה פרטי של תנועה עקמומית, בו רדיוס העקמומיות
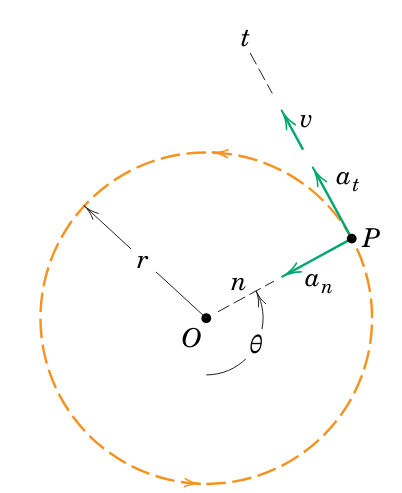
חלקיק הנמצא בתנועה מעגלית (Meriam et al., 2018).
בתנועה זו, גדלי המהירות והתאוצה יהיו נתונים ע”י:
מהירות זוויתית
הביטוי
הגדרה:
מהירות זוויתית היא קצב שינוי המיקום הזוויתי של גוף מסוים. היא מסומנת ב-
ומוגדרת באופן הבא:
קואורדינטות פולאריות
בקואורדינטות פולאריות החלקיק ממוקם במרחק
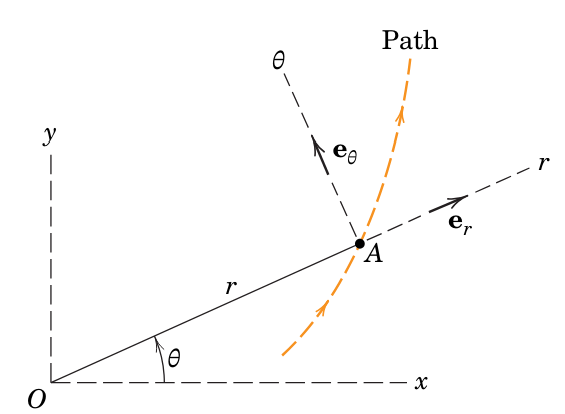
הקואורדינטות
ו- הממקמות חלקיק הנע לאורך עקומה (Meriam et al., 2018).
קו שרירותי קבוע, כמו ציר
נרצה לגזור את הביטוי הזה לפי
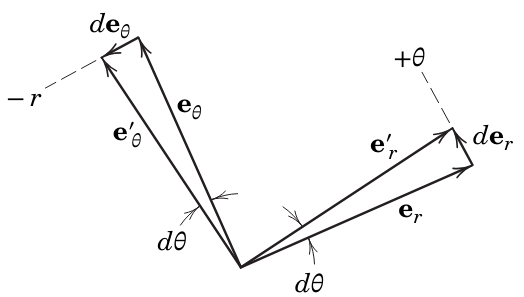
איור עזר לחישוב הנגזרות של וקטורי היחידה
ו- (Meriam et al., 2018).
בזמן
נשים לב שהשינוי בוקטור
הגודל של השינויים הוא פשוט אורך הקשת (בפרק זמן אינפיניטסימלי), שהוא
נחלק ב-
או, בצורה השקולה:
כעת נוכל לגזור את
נציב את
כאשר:
הרכיב
נוכל גם לרשום זאת במונחים של מהירות זוויתית:
כדי לקבל את התאוצה, נגזור את
נציב את
כאשר:
ניתן גם לרשום את רכיב ה-
נוכל לסכם זאת בצורה הבאה:
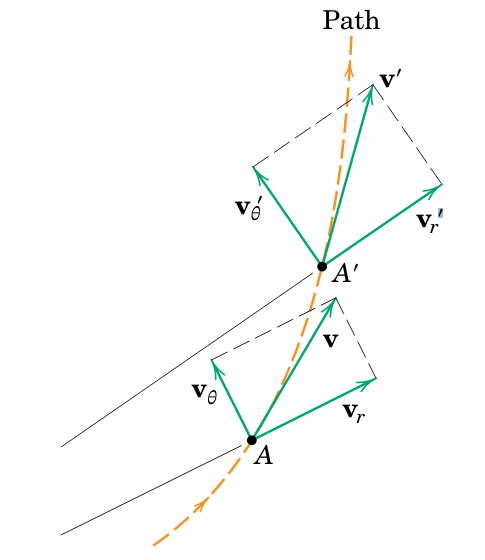
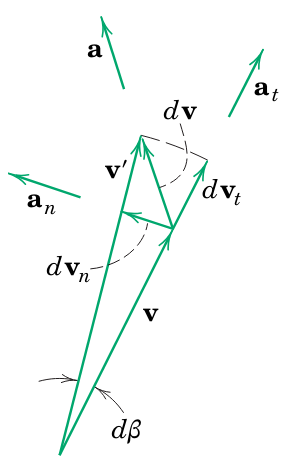
וקטורי המהירות ורכיביהם בנקודה
ובנקודה לאחר תזוזה אינפיניטסימלית (Meriam et al., 2018).
כל אחד מרכיבים אלו עובר שינוי בגודל ובכיוון:
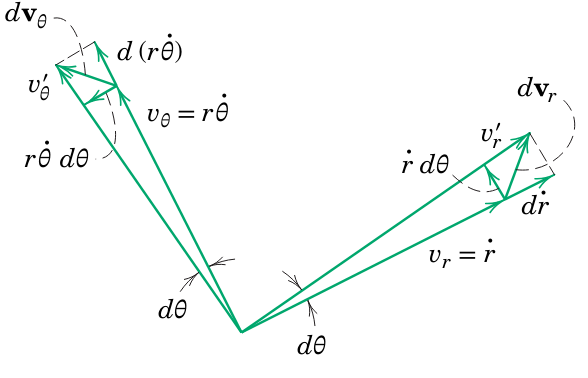
שינויים בגדלים ובכיוונים של רכיבי וקטורי המהירות (Meriam et al., 2018).
- שינוי בגודל של
- שינוי בכיוון
- שינוי בגודל של
- שינוי בכיוון של
הערה:
עבור תנועה מעגלית,
הוא קבוע. נקבל: שזה מה שקיבלנו עבור תנועה מעגלית בקואורדינטות
ו- , אבל הכיוון החיובי של הוא בכיוון השלילי של . לכן, עבור תנועה מעגלית שמרכזה בראשית הצירים הפולארית.
תנועה עקמומית במרחב
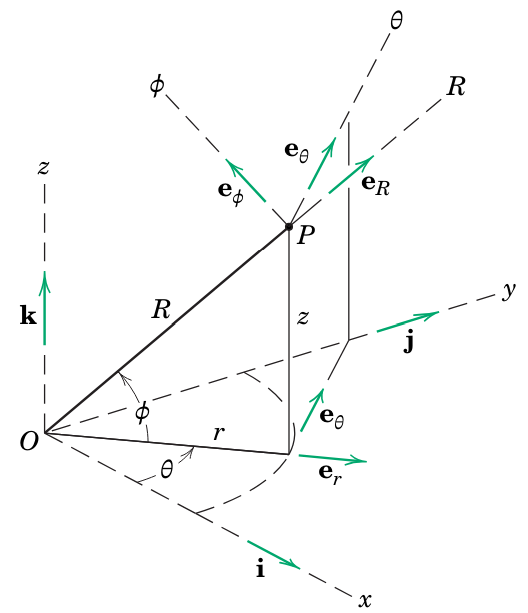
תיאור מיקום של חלקיק בעזרת שלושה סוגים שונים של קואורדינטות (Meriam et al., 2018).
הערה:
בספרות משתמשים בסימונים:
לכן יהיה הבדל בין הסימונים בתרגילים לסימונים בסיכומים.
נעסוק בשלושה סוגים שונים של מערכות צירים במרחב - קרטזית (
השימוש בקואורדינטות הנורמליות משיקיות (
קואורדינטות קרטזיות
בקואורדינטות קרטזיות, הכיוונים
קואורדינטות גליליות
לעומת הקואורדינטות פולאריות, נידרש הפעם להוסיף את הקואורדינטה
הכיוון
כאשר:
התאוצה תהיה נתונה ע”י:
כאשר:
קואורדינטות כדוריות
בקואורדינטות כדוריות מיקום החלקיק מוגדר ע”י מרחק
הערה:
כאן מגדירים את
כהזווית מהמישור לוקטור הרדיאלי , בשונה מחדו”א 2 בו הגדרנו אותו מהציר לוקטור הרדיאלי (ראו איור בתחילת הנושא).
נגדיר וקטורי יחידה
כאשר:
וגם:
כאשר:
תנועה יחסית
תנועה יחסית בין שני חלקיקים
לעיתים נוח לתאר מיקום של נקודה במרחב יחסית לנקודה אחרת. וקטור המיקום של נקודה
מגזירה בזמן של משוואה זו נובע כי המהירות והתאוצה היחסיות מקיימות את הקשר:
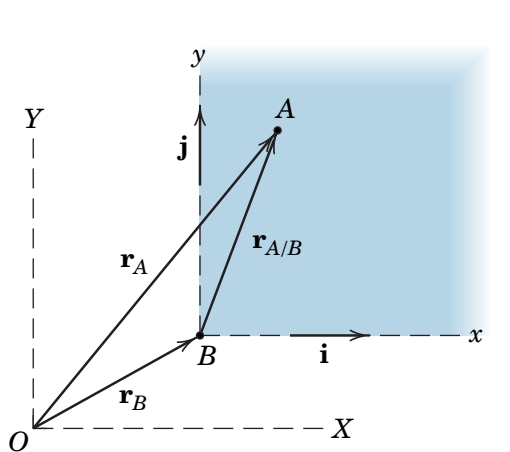
שתי נקודות
ו- בעלות תנועות עקמומיות שונות במישור (Meriam et al., 2018).
קצב סיבוב יחסי בין שני חלקיקים
נתונים המיקום והמהירות של שתי נקודות
כאשר
האיבר
לקצב הסיבוב היחסי לא יכול להיות רכיב בכיוון וקטור המיקום היחסי
כדי להבהיר את התוצאה נרשום אותה באופן:
המכפלה
תרגילים
שאלה 1
חרוז
אורך המוט הקשיח
מיקום החרוז ביחס לנקודה
מיקום הנקודות
גודל מהירות החרוז

תיאור הבעיה הנתונה.
ענו על הסעיפים הבאים עבור
סעיף א’
מהו
פתרון:
מוט
החרוז
נמצא גם את
נציב הכל בשתי המשוואות שקיבלנו בהתחלה:
ולכן עבור
סעיף ב’
מהו
פתרון:
נשתמש שוב בנתון שהמרחק בין החרוזים קבוע:
נגזור לפי הזמן:
מסעיף קודם, אנו יודעים ש:
בנוסף, אנו יודעים שהמהירות של
לכן המהירות היחסית (מהירות
אנו יודעים שהוא ניצב לוקטור המיקום, ולכן:
עבור ה-
סעיף ג’
מהו
פתרון:
נתון כי
בסעיף קודם ראינו כי:
נגזור ביטוי זה שוב:
אנו גם יודעים שתנועת החרוז
נקבל:
נחלץ את
נציב את זוגות הערכים מסעיפים קודמים:
סעיף ד’
מהו הגודל של התאוצה היחסית
פתרון:
התאוצה היחסית הדרושה:
מסעיף קודם, נסיק כי הגודל הוא פשוט:
סעיף ה’
מצאו את היטל המהירות היחסית
פתרון:
יש למצוא את
נזכור כי:
מכאן נקבל:
סעיף ו’
חשבו את
פתרון:
אנו יודעים כי:
ולכן:
כמו כן:
ולכן:
כך שהמכפלה הוקטורית היא פשוט:
מכאן נקבל עבור
סעיף ז’
חשבו את הנגזרת בזמן של
פתרון:
נוכל פשוט לגזור לפי כללי נגזרת של מכפלה:
כאשר:
נוכל כעת לחשב את המכפלה הוקטורית:
מכאן נקבל עבור
סעיף ח’
חשבו את
פתרון:
נשתמש בזהות של מכפלה וקטורית משולשת (bac to cab):
נציב נתונים מסעיפים קודמים:
נציב בחזרה במכפלה המשולשת:
נציב את שני ה-
שאלה 2
חרוז ממקום בתוך צינור חלול

תיאור הבעיה הנתונה.
באמצעות הנתונים
סעיף א’
מהם וקטורי המהירות המוחלטת והתאוצה המוחלטת של החרוז ברכיבי המערכת הקוטבית?
פתרון:
נוכל לרשום את וקטור המיקום של החרוז בצורה הבאה (במערכת גלילית):

גאומטריית המצב.
מגאומטרייה, מאחר והמשולש שווה שוקיים והנתונים:
מטריגונומטריה:
נציב
נגזור:
נשים לב כי
כדי לקבל את המהירות, נגזור כאשר נשים לב שאנו בקואורדינטות גליליות:
באותו אופן עבור התאוצה:
סעיף ב’
מהו וקטור המהירות של החרוז ברכיבי המערכת הקבועה?
פתרון:
נוכל לבנות את הקשר בין המערכת צירים הקרטזית לגלילית:
כעת נציב בתוצאות מהסעיף הקודם:
לאחר פישוט של הפתרון ע”י זהויות טריגונומטריות, נקבל:
סעיף ג’
מהו וקטור התאוצה של החרוז ברכיבי המערכת הקבועה?
פתרון:
כמו בסעיף קודם, נציב את הקשרים בין מערכות הצירים בתוצאות שלנו מסעיף א’. נקבל:
סעיף ד’
מהו וקטור הכיוון של המהירות המוחלטת ברכיבי המערכת הקוטבית?
פתרון:
וקטור הכיוון של המהירות המוחלטת של החרוז, במערכת הצירים הגלילית:
שאלה 3
המוט
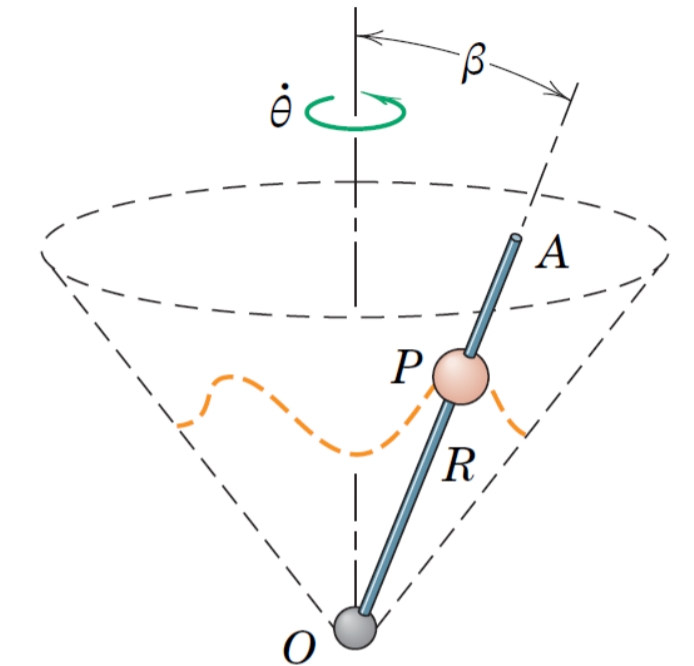
תיאור הבעיה הנתונה.
סעיף א’
בטאו את רכיבי המהירות המוחלטת והתאוצה המוחלטת של החלקיק
- במערכת צירים כדורית.
- במערכת צירים גלילית.
- וודאו את התוצאות באמצעות מציאת גודל המיקום, גודל המהירות, וגודל התאוצה בשתי מערכת הצירים.
פתרון:
נשים לב שהקואורדינטות במערכת זו, ביחס למערכת כדורית הן:
לכן הנגזרות:
במערכת כדורית אנו יודעים כי מיקום החלקיק
לפי נוסחאות למהירות ותאוצה במערכת כדורית:
באותו אופן עבור התאוצה:
במערכת צירים גלילית, ביחס למערכת הצירים הכדורית:
נציב את
נציב במיקום מסעיף קודם כדי לקבל:
נשים לב כי:
נגזור:
נזכור כי
נוודא שוויון בין שתי התוצאות שלנו ע”י השוואה של הגדלים
במערכת כדורית:
באותו אופן עבור המערכת הגלילית, נקבל שהגלים שווים.
סעיף ב’
יש לחשב את גודל תאוצת החלקיק במצב בו מהירותו ביחס למוט
פתרון:
נגזור את הביטוי של
נקבל כי
במקרה זה
נציב את הערכים שקיבלנו:
ולכן: