Introduction
From (Géron, 2023):
So far we have treated machine learning models and their training algorithms mostly like black boxes. However, having a good understanding of how things work can help you quickly home in on the appropriate model, the right training algorithm to use, and a good set of hyperparameters for your task.
Linear Regression
A linear model makes a prediction by simply computing a weighted sum of the input features, plus a constant called the bias term (also called the intercept term), as shown in the following equation:
where:
This can be written much more concisely using a vectorized form:
where:
Recall that training a model means setting its parameters so that the model best fits the training set. For this purpose, we first need a measure of how well (or poorly) the model fits the training data. In HML_002 We saw that the most common performance measure of a regression model is the root mean square error. Therefore, to train a linear regression model, we need to find the value of
The
The Normal Equation
To find the value of
where
Let’s generate some linear-looking data to test this equation:
import numpy as np
np.random.seed(42) # To make this code example reproducible
m = 100 # number of instances
X = 2 * np.random.rand(m,1) # column vector
y = 4 + 3 * X + np.random.rand(m,1) # column vector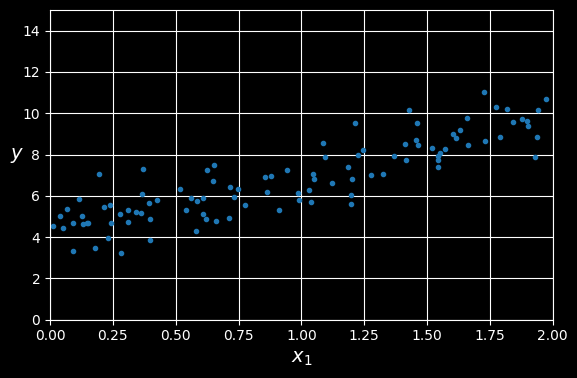
A randomly generated linear dataset.
Now let’s compute inv() function from NumPy’s linear algebra module (np.linalg) to compute the inverse of a matrix, and the dot() method for matrix multiplication:
from sklearn.preprocessing import add_dummy_feature
X_b = add_dummy_feature(X) # add x0 = 1 to each instance
theta_best = np.linalg.inv(X_b.T @ X_b) @ X_b.T @ yNotes:
- We set
because this is how the regression is defined. - The
@operator performs matrix multiplication.
The function that we used to generate the data is
>>> theta_best
array([[4.21509616],
[2.77011339]])Close enough, but the noise made it impossible to recover the exact parameters of the original function. The smaller and noisier the dataset, the harder it gets.
Now we can make predictions using
>>>X_new = np.array([[0], [2]])
>>>X_new_b = add_dummy_feature(X_new) # add x0 = 1 to each instance
>>>y_predict = X_new_b @ theta_best
>>>y_predict
array([[4.21509616],
[9.75532293]])Let’s plot this model’s predictions:
import matplotlib.pyplot as plt
plt.figure(figsize=(6, 4)) # extra code – not needed, just formatting
plt.plot(X, y, ".")
plt.plot(X_new, y_predict, "-", label="Predictions")
[...] # beautify the figure: add labels, axis, grid, and legend
plt.show()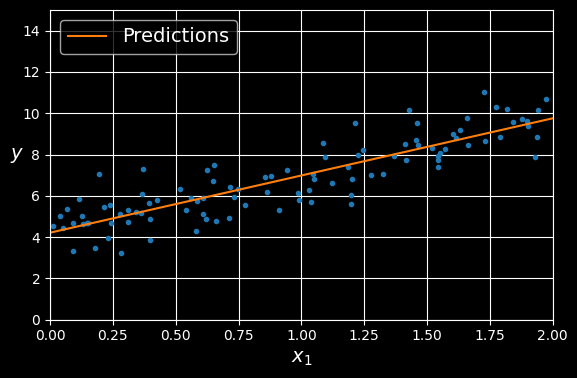
Linear regression model predictions
Performing linear regression using Scikit-Learn is relatively straightforward:
>>> from sklearn.linear_model import LinearRegression
>>> lin_reg = LinearRegression()
>>> lin_reg.fit(X, y)
>>> lin_reg.intercept_, lin_reg.coef_
(array([4.21509616]), array([[2.77011339]]))
>>> lin_reg.predict(X_new)
array([[4.21509616],
[9.75532293]])Notice that Scikit-Learn separates the bias term (intercept_) from the feature weights (coef_). The LinearRegression class is based on the scipy.linalg.lstsq() function (the name stands for “least squares”), which you could call directly:
>>> theta_best_svd, residuals, rank, s = np.linalg.lstsq(X_b, y, rcond=1e-6)
>>> theta_best_svd
array([[4.21509616],
[2.77011339]])This function computes np.linalg.pinv() to compute the pseudoinverse directly:
>>> np.linalg.pinv(X_b) @ y
array([[4.21509616],
[2.77011339]]) The pseudoinverse itself is computed using a standard matrix factorization technique called singular value decomposition (SVD) that can decompose the training set matrix (see numpy.linalg.svd()). The pseudoinverse is computed as
Computational Complexity
The Normal equation computes the inverse of
The SVD approach used by Scikit-Learn’s LinearRegression class is about
Also, once you have trained your linear regression model (using the Normal equation or any other algorithm), predictions are very fast: the computational complexity is linear with regard to both the number of instances you want to make predictions on and the number of features. In other words, making predictions on twice as many instances (or twice as many features) will take roughly twice as much time.
Gradient Descent
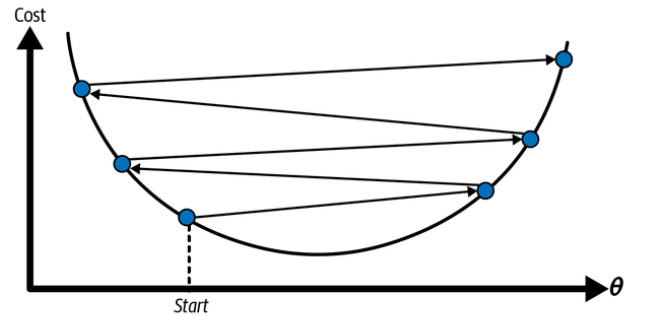
Gradient descent is a generic optimization algorithm capable of finding optimal solutions to a wide range of problems. The general idea of gradient descent is to tweak parameters iteratively in order to minimize a cost function.
Suppose you are lost in the mountains in a dense fog, and you can only feel the slope of the ground below your feet. A good strategy to get to the bottom of the valley quickly is to go downhill in the direction of the steepest slope. This is exactly what gradient descent does: it measures the local gradient of the error function with regard to the parameter vector
In practice, you start by filling
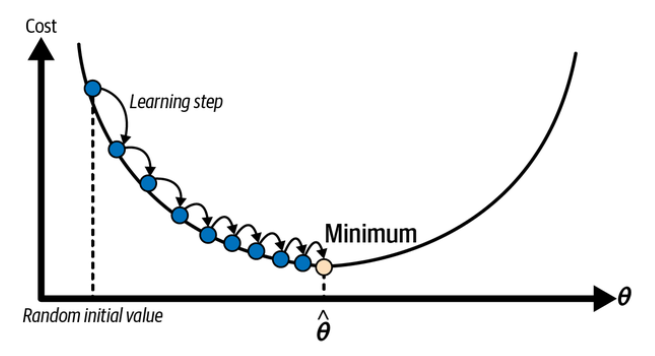
In this depiction of gradient descent, the model parameters are initialized randomly and get tweaked repeatedly to minimize the cost function; the learning step size is proportional to the slope of the cost function, so the steps gradually get smaller as the cost approaches the minimum. (Géron, 2023).
An important parameter in gradient descent is the size of the steps, determined by the learning rate hyperparameter. If the learning rate is too small, then the algorithm will have to go through many iterations to converge, which will take a long time:
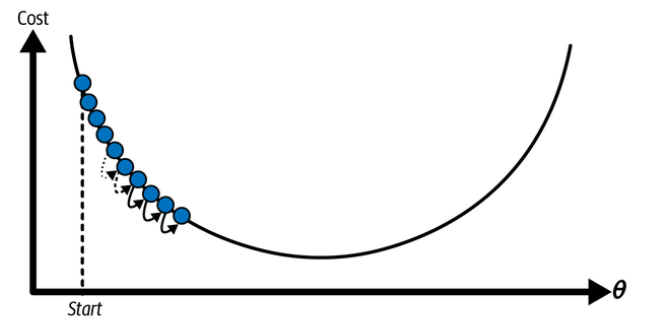
Learning rate too small. (Géron, 2023).
On the other hand, if the learning rate is too high, you might jump across the valley and end up on the other side, possibly even higher up than you were before. This might make the algorithm diverge, with larger and larger values, failing to find a good solution:
Learning rate too high. (Géron, 2023).
Additionally, not all cost functions look like nice, regular bowls. There may be holes, ridges, plateaus, and all sorts of irregular terrain, making convergence to the minimum difficult. Fortunately, the
While the cost function has the shape of a bowl, it can be an elongated bowl if the features have very different scales.
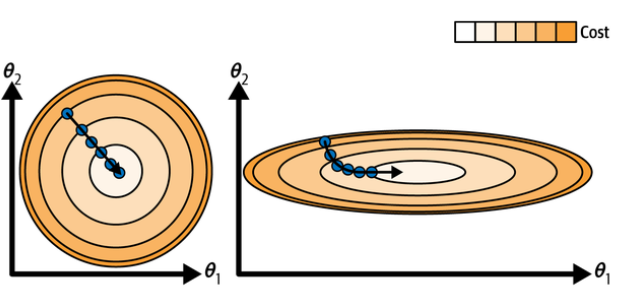
Gradient descent with (left) and without (right) feature scaling. (Géron, 2023).
The graph above shows gradient descent on a training set where features 1 and 2 have the same scale (on the left), and on a training set where feature 1 has much smaller values than feature 2 (on the right).
As you can see, on the left the gradient descent algorithm goes straight toward the minimum, thereby reaching it quickly, whereas on the right it first goes in a direction almost orthogonal to the direction of the global minimum, and it ends with a long march down an almost flat valley. It will eventually reach the minimum, but it will take a long time.
Warning:
When using gradient descent, you should ensure that all features have similar scale (e.g., using Scikit-Learn’s
StandardScalerclass), or else it will take much longer to converge.
This diagram also illustrates the fact that training a model means searching for a combination of model parameters that minimizes a cost function (over the training set). It is a search in the model’s parameter space. The more parameters a model has, the more dimensions this space has, and the harder the search is: searching for a needle in a 300-dimensional haystack is much trickier than in 3 dimensions. Fortunately, since the cost function is convex in the case of linear regression, the needle is simply at the bottom of the bowl.
Batch Gradient Descent
To implement gradient descent, you need to compute the gradient of the cost function with regard to each model parameter
The following equation computes the partial derivative of the
Instead of computing these partial derivatives individually, you can use the following equation to compute them all in one go:
Warning:
Notice that this formula involves calculations over the full training set
, at each gradient descent step! This is why the algorithm is called batch gradient descent: it uses the whole batch of training data at every step (actually, full gradient descent would probably be a better name).
As a result, it is terribly slow on very large training sets (we will look at some much faster gradient descent algorithms shortly). However, gradient descent scales well with the number of features; training a linear regression model when there are hundreds of thousands of features is much faster using gradient descent than using the Normal equation or SVD decomposition.
Once you have the gradient vector, which points uphill, just go in the opposite direction to go downhill. This means subtracting
Let’s look at a quick implementation of this algorithm:
eta = 0.1 # learning rate
n_epochs = 1000
m = len(X_b) # number of instances
np.random.seed(42)
theta = np.random.randn(2, 1) # randomly initialized model parameters
for epoch in range(n_epochs):
gradients = 2 / m * X_b.T @ (X_b @ theta - y)
theta = theta - eta * gradientsEach iteration over the training set is called an epoch. Let’s look at the resulting theta:
>>> theta
array([[4.21509616],
[2.77011339]])That’s exactly what the Normal equation found! Gradient descent worked perfectly. But what if you had used a different learning rate (eta)?
The following figure shows the first 20 steps of gradient descent using three different learning rates. The line at the bottom of each plot represents the random starting point, then each epoch is represented by a darker and darker line.
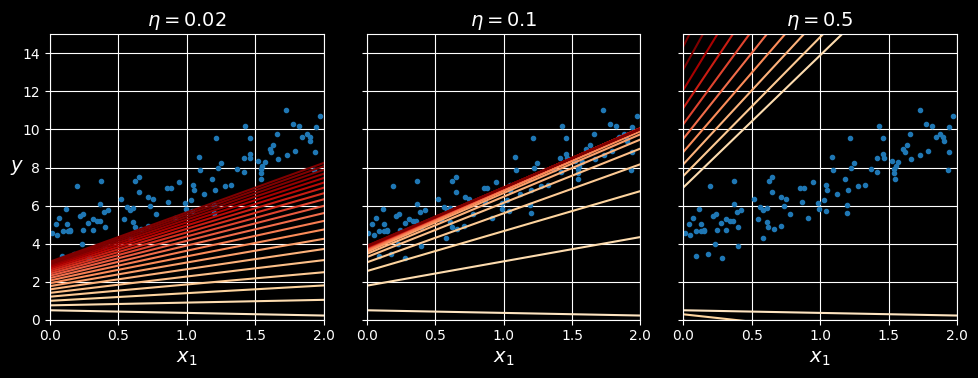
Gradient descent with various learning rates.
On the left, the learning rate is too low: the algorithm will eventually reach the solution, but it will take a long time. In the middle, the learning rate looks pretty good: in just a few epochs, it has already converged to the solution. On the right, the learning rate is too high: the algorithm diverges, jumping all over the place and actually getting further and further away from the solution at every step.
To find a good learning rate, you can use grid search. However, you may want to limit the number of epochs so that grid search can eliminate models that take too long to converge.
You may wonder how to set the number of epochs. If it is too low, you will still be far away from the optimal solution when the algorithm stops; but if it is too high, you will waste time while the model parameters do not change anymore. A simple solution is to set a very large number of epochs but to interrupt the algorithm when the gradient vector becomes tiny - that is, when its norm becomes smaller than a tiny number
Stochastic Gradient Descent
The main problem with batch gradient descent is the fact that it uses the whole training set to compute the gradients at every step, which makes it very slow when the training set is large. At the opposite extreme, stochastic gradient descent picks a random instance in the training set at every step and computes the gradients based only on that single instance.
Obviously, working on a single instance at a time makes the algorithm much faster because it has very little data to manipulate at every iteration. It also makes it possible to train on huge training sets, since only one instance needs to be in memory at each iteration.
On the other hand, due to its stochastic (i.e., random) nature, this algorithm is much less regular than batch gradient descent: instead of gently decreasing until it reaches the minimum, the cost function will bounce up and down, decreasing only on average. Over time it will end up very close to the minimum, but once it gets there it will continue to bounce around, never settling down:
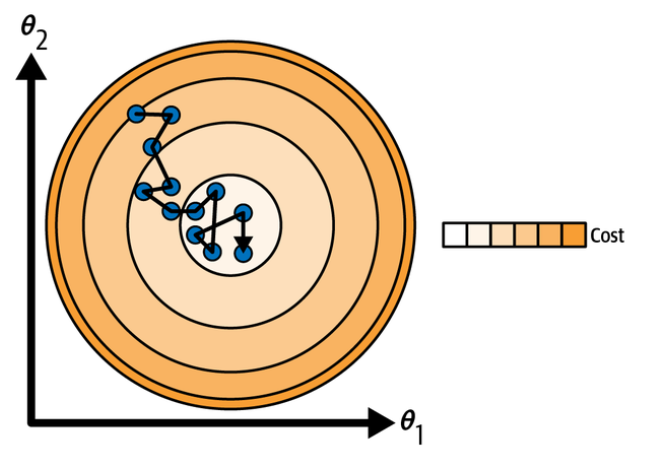
With stochastic gradient descent, each training step is much faster but also much more stochastic than when using batch gradient descent. (Géron, 2023).
When the cost function is very irregular, this can actually help the algorithm jump out of local minima, so stochastic gradient descent has a better chance of finding the global minimum than batch gradient descent does.
Therefore, randomness is good to escape from local optima, but bad because it means that the algorithm can never settle at the minimum. One solution to this dilemma is to gradually reduce the learning rate. The steps start out large (which helps make quick progress and escape local minima), then get smaller and smaller, allowing the algorithm to settle at the global minimum. This process is akin to simulated annealing, an algorithm inspired by the process in metallurgy of annealing, where molten metal is slowly cooled down. The function that determines the learning rate at each iteration is called the learning schedule. learning rate is reduced too quickly, you may get stuck in a local minimum, or even end up frozen halfway to the minimum. If the learning rate is reduced too slowly, you may jump around the minimum for a long time and end up with a suboptimal solution if you halt training too early. This code implements stochastic gradient descent using a simple learning schedule:
n_epochs = 50
t0, t1 = 5, 50 # learning schedule hyperparameters
def learning_schedule(t):
return t0 / (t + t1)
np.random.seed(42)
theta = np.random.randn(2, 1) # random initialization
n_shown = 20 # extra code – just needed to generate the figure below
plt.figure(figsize=(6, 4)) # extra code – not needed, just formatting
for epoch in range(n_epochs):
for iteration in range(m):
random_index = np.random.randint(m)
xi = X_b[random_index : random_index + 1]
yi = y[random_index : random_index + 1]
gradients = 2 * xi.T @ (xi @ theta - yi) # for SGD, do not divide by m
eta = learning_schedule(epoch * m + iteration)
theta = theta - eta * gradientsBy convention we iterate by rounds of
>>> theta
array([[4.21076011],
[2.74856079]])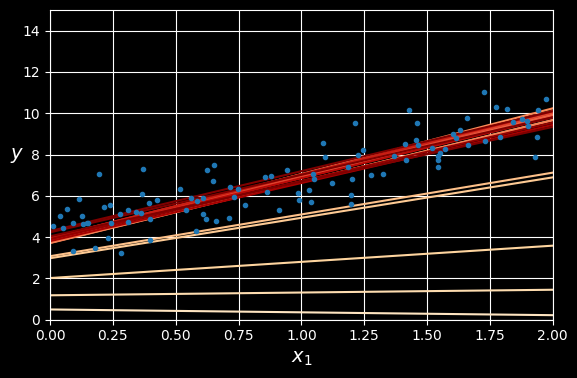
The first 20 steps of stochastic gradient descent.
Note that since instances are picked randomly, some instances may be picked several times per epoch, while others may not be picked at all. If you want to be sure that the algorithm goes through every instance at each epoch, another approach is to shuffle the training set (making sure to shuffle the input features and the labels jointly), then go through it instance by instance, then shuffle it again, and so on. However, this approach is more complex, and it generally does not improve the result.
Warning:
When using stochastic gradient descent, the training instances must be independent and identically distributed (IID) to ensure that the parameters get pulled toward the global optimum, on average. A simple way to ensure this is to shuffle the instances during training (e.g., pick each instance randomly, or shuffle the training set at the beginning of each epoch). If you do not shuffle the instances - for example, if the instances are sorted by label - then SGD will start by optimizing for one label, then the next, and so on, and it will not settle close to the global minimum.
To perform linear regression using stochastic GD with Scikit-Learn, you can use the SGDRegressor class, which defaults to optimizing the
from sklearn.linear_model import SGDRegressor
sgd_reg = SGDRegressor(max_iter=1000, tol=1e-5, penalty=None, eta0=0.01,
n_iter_no_change=100, random_state=42)
sgd_reg.fit(X, y.ravel()) # y.ravel() because fit() expects 1D targetsOnce again, you find a solution quite close to the one returned by the Normal equation:
>>> sgd_reg.intercept_, sgd_reg.coef_
(array([4.21278812]), array([2.77270267]))Mini-Batch Gradient Descent
The last gradient descent algorithm we will look at is called mini-batch gradient descent. It is straightforward once you know batch and stochastic gradient descent: at each step, instead of computing the gradients based on the full training set (as in batch GD) or based on just one instance (as in stochastic GD), minibatch GD computes the gradients on small random sets of instances called minibatches. The main advantage of mini-batch GD over stochastic GD is that you can get a performance boost from hardware optimization of matrix operations, especially when using GPUs.
The algorithm’s progress in parameter space is less erratic than with stochastic GD, especially with fairly large mini-batches. As a result, mini-batch GD will end up walking around a bit closer to the minimum than stochastic GD - but it may be harder for it to escape from local minima (in the case of problems that suffer from local minima, unlike linear regression with the MSE cost function).
The following figure shows the paths taken by the three gradient descent algorithms in parameter space during training:
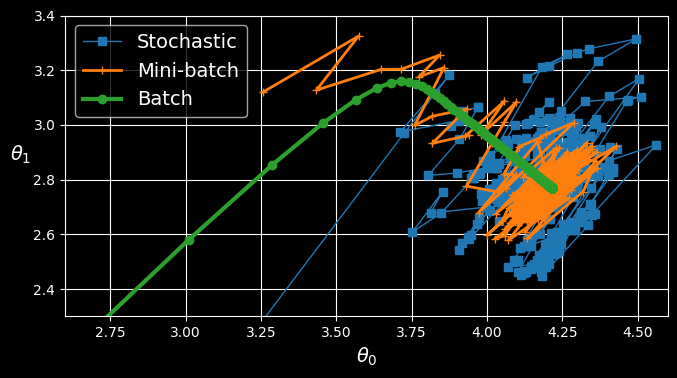
Gradient descent paths in parameter space.
They all end up near the minimum, but batch GD’s path actually stops at the minimum, while both stochastic GD and mini-batch GD continue to walk around. However, don’t forget that batch GD takes a lot of time to take each step, and stochastic GD and mini-batch GD would also reach the minimum if you used a good learning schedule.
The following table compares the algorithms we’ve discussed so far for linear regression (recall that
| Algorithm | Large | Out-of-core support | Large | Hyperparams |
|---|---|---|---|---|
| Normal equation | Fast | No | Slow | |
| SVD | Fast | No | Slow | |
| Batch GD | Slow | No | Fast | |
| Stochastic GD | Fast | Yes | Fast | |
| Mini-batch GD | Fast | Yes | Fast | |
| There is almost no difference after training: all these algorithms end up with very similar models and make predictions in exactly the same way. |
Polynomial Regression
What if your data is more complex than a straight line? Surprisingly, you can use a linear model to fit nonlinear data. A simple way to do this is to add powers of each feature as new features, then train a linear model on this extended set of features. This technique is called polynomial regression.
Let’s look at an example. First, we’ll generate some nonlinear data based on a simple quadratic equation:
np.random.seed(42)
m = 100
X = 6 * np.random.rand(m, 1) - 3
y = 0.5 * X ** 2 + X + 2 + np.random.randn(m, 1)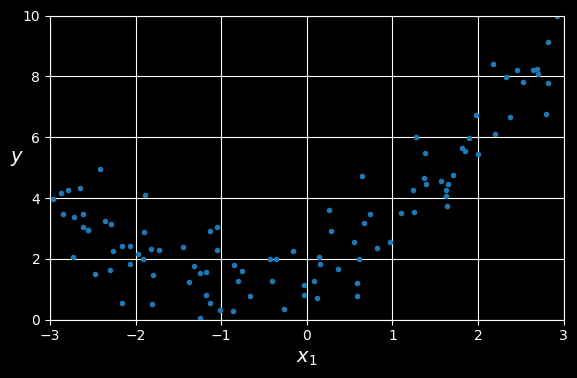
Generated nonlinear and noisy dataset.
Clearly, a straight line will never fit this data properly. So let’s use Scikit-Learn’s PolynomialFeatures class to transform our training data, adding the square (second-degree polynomial) of each feature in the training set as a new feature (in this case there is just one feature):
>>> from sklearn.preprocessing import PolynomialFeatures
>>> poly_features = PolynomialFeatures(degree=2, include_bias=False)
>>> X_poly = poly_features.fit_transform(X)
>>> X[0]
array([-0.75275929])
>>> X_poly[0]
array([-0.75275929, 0.56664654])X_poly now contains the original feature of X plus the square of this feature. Now we can fit a LinearRegression model to this extended training data:
>>> lin_reg = LinearRegression()
>>> lin_reg.fit(X_poly, y)
>>> lin_reg.intercept_, lin_reg.coef_
(array([1.78134581]), array([[0.93366893, 0.56456263]]))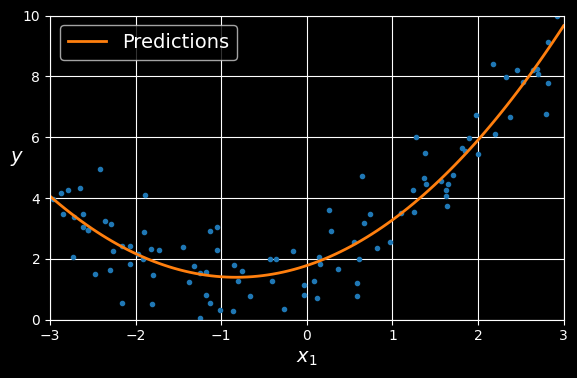
Polynomial regression model predictions.
The model estimates
Note that when there are multiple features, polynomial regression is capable of finding relationships between features, which is something a plain linear regression model cannot do. This is made possible by the fact that PolynomialFeatures also adds all combinations of features up to the given degree. For example, if there were two features PolynomialFeatures with degree=3 would not only add the features
Learning Curves
If you perform high-degree polynomial regression, you will likely fit the training data much better than with plain linear regression. For example, in the following figure, a 300-degree polynomial model is applied to the preceding training data, and compares the result with a pure linear model and a quadratic model. Notice how the 300-degree polynomial model wiggles around to get as close as possible to the training instances:
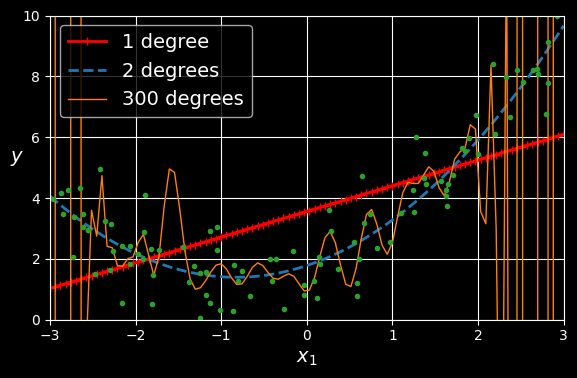
High-degree polynomial regression.
This high-degree polynomial regression model is severely overfitting the training data, while the linear model is underfitting it. The model that will generalize best in this case is the quadratic model, which makes sense because the data was generated using a quadratic model. But in general you won’t know what function generated the data, so how can you decide how complex your model should be? How can you tell that your model is overfitting or underfitting the data?
In HML_002 you used cross-validation to get an estimate of a model’s generalization performance. If a model performs well on the training data but generalizes poorly according to the cross-validation metrics, then your model is overfitting. If it performs poorly on both, then it is underfitting. This is one way to tell when a model is too simple or too complex.
Another way to tell is to look at the learning curves, which are plots of the model’s training error and validation error as a function of the training iteration: just evaluate the model at regular intervals during training on both the training set and the validation set, and plot the results.
Scikit-Learn has a useful learning_curve() function to help with this: it trains and evaluates the model using cross-validation. The function returns the training set sizes at which it evaluated the model, and the training and validation scores it measured for each size and for each cross-validation fold. Let’s use this function to look at the learning curves of the plain linear regression model:
from sklearn.model_selection import learning_curve
train_sizes, train_scores, valid_scores = learning_curve(
LinearRegression(), X, y, train_sizes=np.linspace(0.01, 1.0, 40), cv=5,
scoring="neg_root_mean_squared_error")
train_errors = -train_scores.mean(axis=1)
valid_errors = -valid_scores.mean(axis=1)
plt.plot(train_sizes, train_errors, "-+", linewidth=2, label="train")
plt.plot(train_sizes, valid_errors, "-", linewidth=3, label="valid")
[...]
plt.show()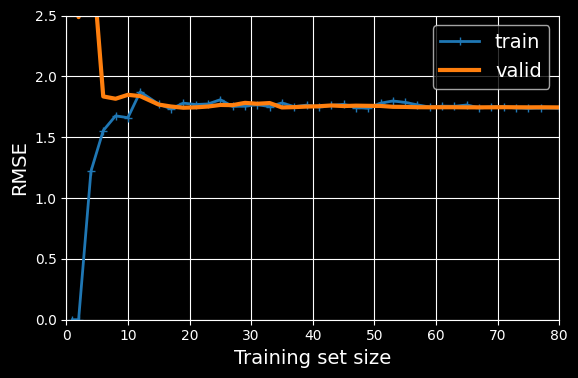
Learning curves.
This model is underfitting. To see why, first let’s look at the training error. When there are just one or two instances in the training set, the model can fit them perfectly, which is why the curve starts at zero. But as new instances are added to the training set, it becomes impossible for the model to fit the training data perfectly, both because the data is noisy and because it is not linear at all. So the error on the training data goes up until it reaches a plateau, at which point adding new instances to the training set doesn’t make the average error much better or worse. Now let’s look at the validation error. When the model is trained on very few training instances, it is incapable of generalizing properly, which is why the validation error is initially quite large. Then, as the model is shown more training examples, it learns, and thus the validation error slowly goes down. However, once again a straight line cannot do a good job of modeling the data, so the error ends up at a plateau, very close to the other curve.
These learning curves are typical of a model that’s underfitting. Both curves have reached a plateau; they are close and fairly high.
Now let’s look at the learning curves of a 10th-degree polynomial model on the same data:
from sklearn.pipeline import make_pipeline
polynomial_regression = make_pipeline(
PolynomialFeatures(degree=10, include_bias=False),
LinearRegression())
train_sizes, train_scores, valid_scores = learning_curve(
polynomial_regression, X, y, train_sizes=np.linspace(0.01, 1.0, 40), cv=5,
scoring="neg_root_mean_squared_error")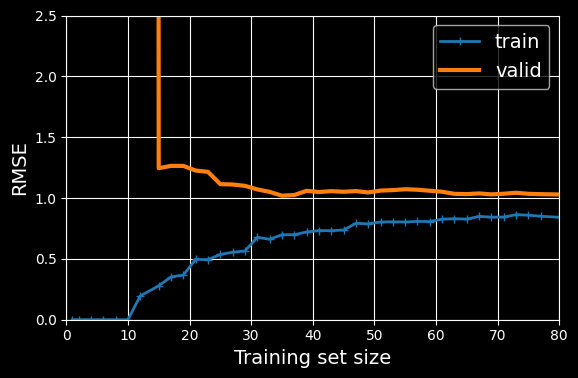
Learning curves for the
th-degree polynomial model.
These learning curves look a bit like the previous ones, but there are two very important differences:
- The error on the training data is much lower than before.
- There is a gap between the curves. This means that the model performs significantly better on the training data than on the validation data, which is the hallmark of an overfitting model. If you used a much larger training set, however, the two curves would continue to get closer.
The Bias/Variance Trade-Off
An important theoretical result of statistics and machine learning is the fact that a model’s generalization error can be expressed as the sum of three very different errors:
- Bias: This part of the generalization error is due to wrong assumptions, such as assuming that the data is linear when it is actually quadratic. A high-bias model is most likely to underfit the training data.
- Variance: This part is due to the model’s excessive sensitivity to small variations in the training data. A model with many degrees of freedom (such as a high-degree polynomial model) is likely to have high variance and thus overfit the training data.
- Irreducible error: This part is due to the noisiness of the data itself. The only way to reduce this part of the error is to clean up the data (e.g., fix the data sources, such as broken sensors, or detect and remove outliers).
Increasing a model’s complexity will typically increase its variance and reduce its bias. Conversely, reducing a model’s complexity increases its bias and reduces its variance. This is why it is called a trade-off.
Regularized Linear Models
A good way to reduce overfitting is to regularize the model (i.e., to constrain it): the fewer degrees of freedom it has, the harder it will be for it to overfit the data. A simple way to regularize a polynomial model is to reduce the number of polynomial degrees. For a linear model, regularization is typically achieved by constraining the weights of the model.
Ridge Regression
Ridge regression (also called Tikhonov regularization) is a regularized version of linear regression: a regularization term equal to
The hyperparameter
Note that the bias term
The following figure shows several ridge models that were trained on some very noisy linear data using different
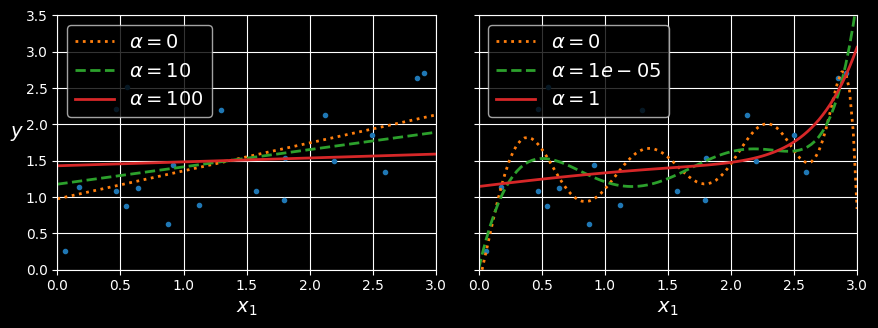
Linear (left) and a polynomial (right) models, both with various levels of ridge regularization.
On the left, plain ridge models are used, leading to linear predictions. On the right, the data is first expanded using PolynomialFeatures(degree=10), then it is scaled using a StandardScaler, and finally the ridge models are applied to the resulting features: this is polynomial regression with ridge regularization. Note how increasing
As with linear regression, we can perform ridge regression either by computing a closed-form equation or by performing gradient descent. The pros and cons are the same. The following equation shows the closed-form solution, where
Here is how to perform ridge regression with Scikit-Learn using a closed-form solution (a variant of the equation above that uses a matrix factorization technique by André-Louis Cholesky):
>>> from sklearn.linear_model import Ridge
>>> ridge_reg = Ridge(alpha=0.1, solver="cholesky")
>>> ridge_reg.fit(X, y)
>>> ridge_reg.predict([[1.5]])
array([[1.55325833]])And using stochastic gradient descent:
>>> sgd_reg = SGDRegressor(penalty="l2", alpha=0.1 / m, tol=None,
max_iter=1000, eta0=0.01, random_state=42)
>>> sgd_reg.fit(X, y.ravel()) # y.ravel() because fit() expects 1D targets
>>> sgd_reg.predict([[1.5]])
array([1.55302613])The penalty hyperparameter sets the type of regularization term to use. Specifying “l2” indicates that you want SGD to add a regularization term to the ridge regression, except there’s no division by alpha=0.1 / m, to get the same result as Ridge(alpha=0.1).
Tip:
The
RidgeCVclass also performs ridge regression, but it automatically tunes hyperparameters using cross-validation. It’s roughly equivalent to usingGridSearchCV, but it’s optimized for ridge regression and runs much faster. Several other estimators (mostly linear) also have efficient CV variants, such asLassoCVandElasticNetCV.
Lasso Regression
Least absolute shrinkage and selection operator regression (usually simply called lasso regression) is another regularized version of linear regression: just like ridge regression, it adds a regularization term to the cost function, but it uses the
Notice that the
The following figure shows the same thing as the previous figure but replaces the ridge models with lasso models and uses different
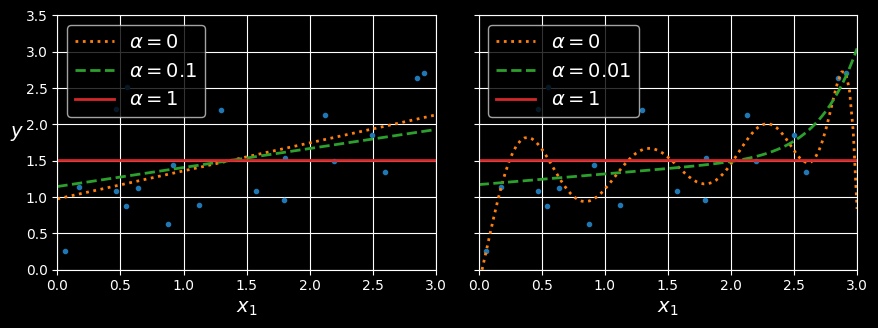
Linear (left) and polynomial (right) models, both using various levels of lasso regularization.
An important characteristic of lasso regression is that it tends to eliminate the weights of the least important features (i.e., set them to zero). For example, the dashed line in the righthand plot in the figure (with
You can get a sense of why this is the case by looking at the the following figure:
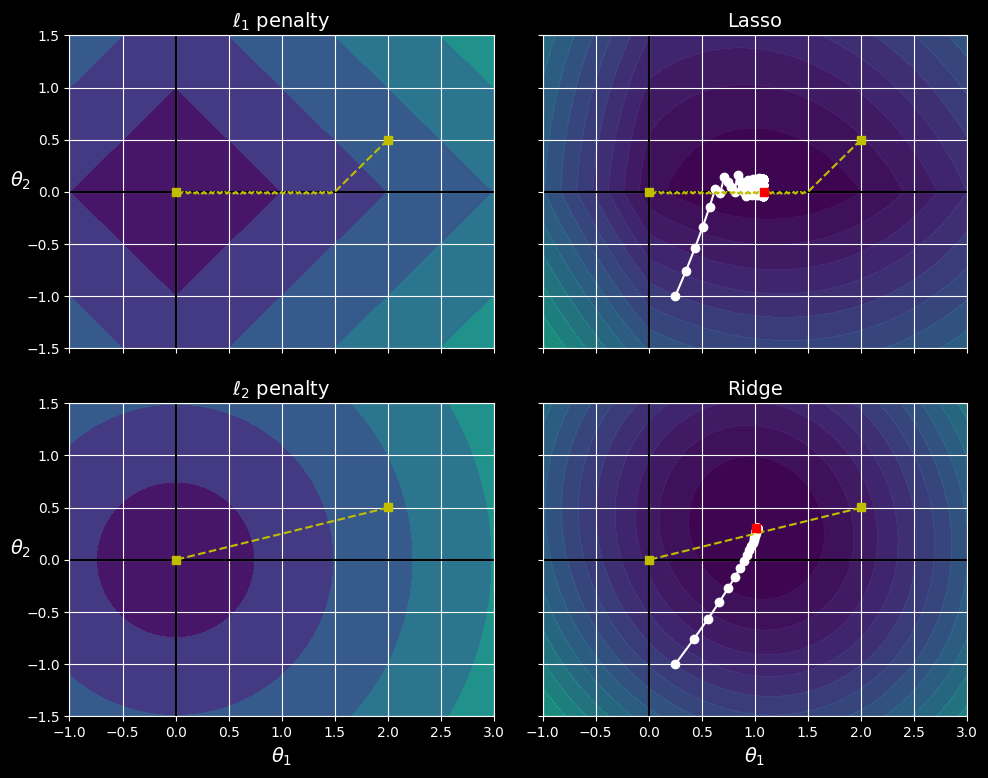
Lasso versus ridge regularization.
The axes represent two model parameters, and the background contours represent different loss functions.
In the top-left plot, the contours represent the
In the top-right plot, the contours represent lasso regression’s cost function (i.e., an
The two bottom plots show the same thing but with an
Logistic Regression
Some regression algorithms can be used for classification (and vice versa). Logistic regression (also called logit regression) is commonly used to estimate the probability that an instance belongs to a particular class (e.g., what is the probability that this email is spam?). If the estimated probability is greater than a given threshold (typically 50%), then the model predicts that the instance belongs to that class (called the positive class, labeled “1”), and otherwise it predicts that it does not (i.e., it belongs to the negative class, labeled “0”). This makes it a binary classifier.
Estimating Probabilities
So how does logistic regression work? Just like a linear regression model, a logistic regression model computes a weighted sum of the input features (plus a bias term), but instead of outputting the result directly like the linear regression model does, it outputs the logistic of this result:
The logistic - noted
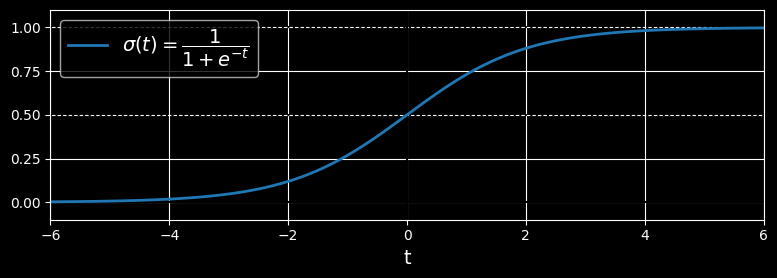
Logistic function
Once the logistic regression model has estimated the probability
Notice that
Training and Cost Function
Now you know how a logistic regression model estimates probabilities and makes predictions. But how is it trained? The objective of training is to set the parameter vector
This cost function makes sense because
The cost function over the whole training set is the average cost over all training instances. It can be written in a single expression called the log loss, shown in:
\dfrac{ \partial }{ \partial \theta_{j} } J(\boldsymbol{\theta})=\dfrac{1}{m}\sum_{i=1}^{m} (\sigma(\boldsymbol{\theta}^{T}\mathbf{x}^{(i)})-y^{(i)})x_{j}^{(i)}