מצאתם טעות? שלחו הודעה קצרה. גם אם זה רק שגיעת כתיב קטנה. תודה לינאי וגיל ששיכנעו אותי להוסיף את זה...
DVI1_008 רטט במערכות רציפות
• זמן קריאה: 19 דק'
מבוא
עד עכשיו עסקנו במערכות בדידות - מערכות בהן אנו מניחים שהמסות מרוכזות בנקודות יחידות, דיסקרטיות, והן מחוברות ביניהן ע”י מוטות, קפיצים ואלמנטים אחרים קשיחים חסרי מסה. התנועה של מערכות אלו מתוארת ע”י מד”רים, עם משוואה אחת לכל מסה, ומספר המסות מגדיר את מספר דרגות החופש של המערכת.
כעת, כאשר נעבור למודל טיפה יותר מדויק של מערכות - מערכות רציפות, המשוואות המתארות את התנועה של המערכת יהיו מד”חים. כיף חיים. נצטרך לקחת בחשבון עקרונות ממוצקים, בנוסף לתנאי שפה.
משוואות התנועה של חוט תונד
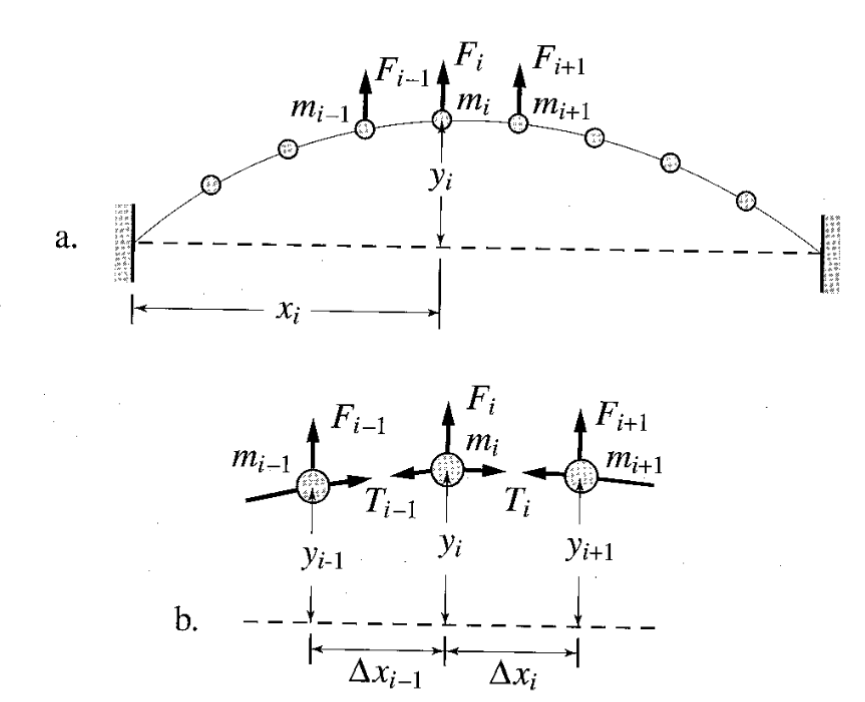
כדי למדל תנועה של מוט אורכי רציף, אנו יכולים לפרק אותו למספר מסות בדידות, ולהשאיף את פירוק זה לאינסוף. עוד דרך היא לפתח מאזן תנע קווי על כל אלמנט דיפרנציאלי של החוט, כמו שעשינו בפיזיקה 2. ישנה עוד דרך המסתמכת על עיקרון המילטון.
פירוק החוט למספר סופי של מסות. (a) החוט כמערכת בדידה. (b) דג”ח על המסות בחוט. (Meirovitch, 2001).
פירוק החוט לאלמנטים דיפרנציאליים. (a) החוט כמערכת רציפה. (b) דג”ח על אלמנט של חוט. (Meirovitch, 2001).
מפיתוחים אלו אנו מקבלים את משוואת התנועה:
כאשר:
היא המתיחות בחוט.
היא צפיפות המסה של החוט.
הוא הכוח הניצב לאורך החוט.
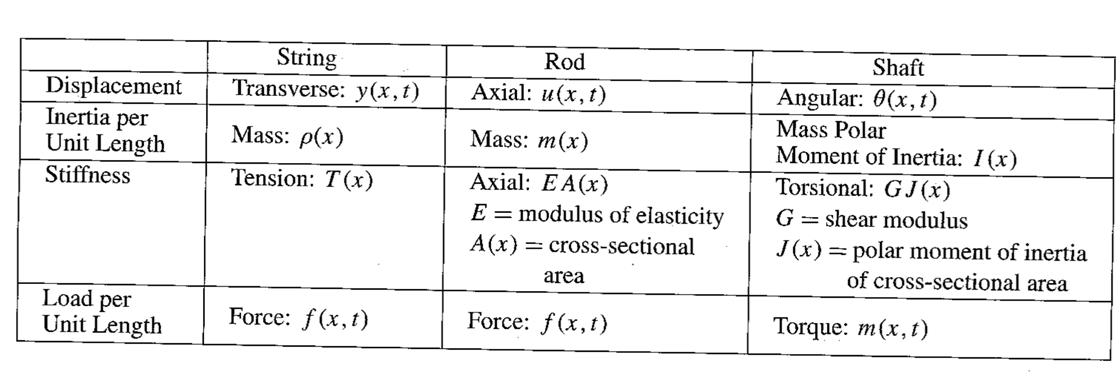
משוואת תנועה בסיסית זו תקיפה גם עבור בעיות שונות דומות, למשל עבור מוט במתיחה או גל בפיתול. בשביל ההמרות ניתן להיעזר בטבלה הבאה:
כאשר נשים לב שלפי הצורה הכללית של שטורם-ליוביל, פונקציית המשקל במקרה שלנו היא .
נמצא אין סוף ערכים עצמיים , פונקציות עצמיות , ולכן גם , נפתח את תנאי ההתחלה והביטוי האי-הומוגני לטורי פורייה, ועבור הבעיה הספציפית שלנו, נקבל פתרון מהצורה:
כאשר במקרה הזה, , (ראו תרגיל אחרון במשוואת הגלים), והערכים העצמיים אנו סימנו .
נשים לב שבתצורה זו, כבר מופיעים לנו המודים הטבעיים, , של המערכת. היא התדירות הטבעית, ו- ו- הן האמפליטודות והפאזות, בהתאמה, שאותן אנו מוצאים מתנאי התחלה.
הביטויים ו- הם ביטויים התלויים בתכונות המערכת עצמה, בעוד ו- תלויים במשתנים חיצוניים למערכת.
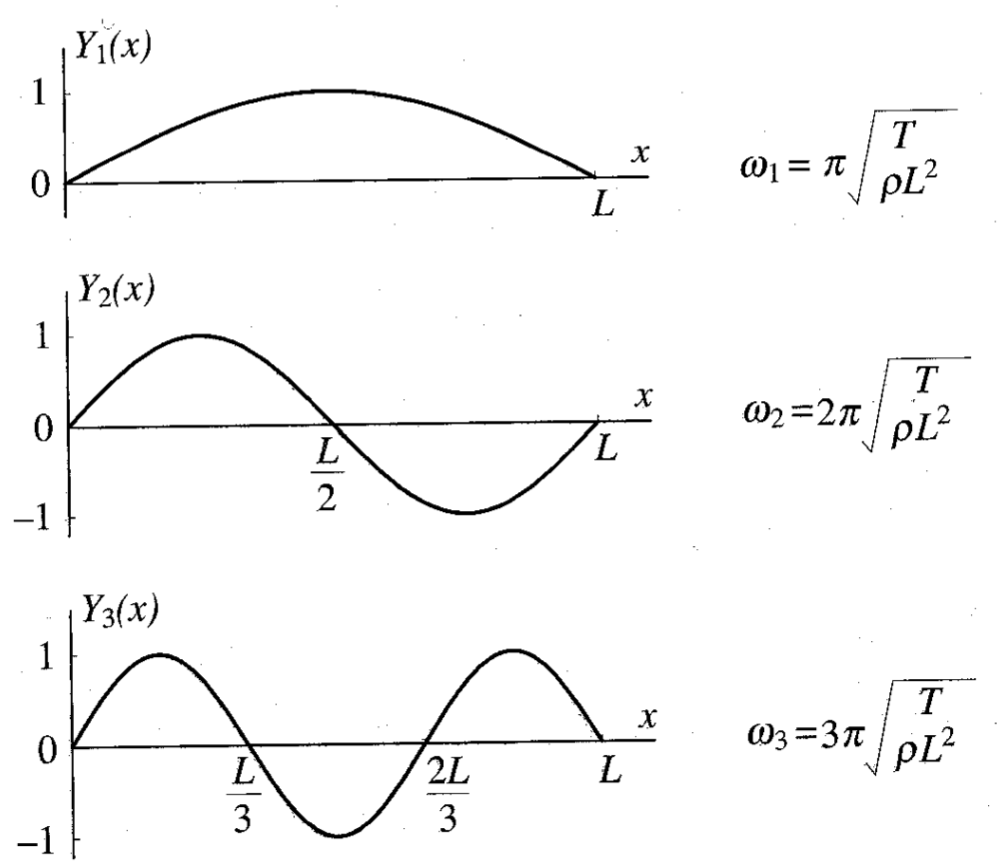
מודים טבעיים של חוט מקובע (בספר, הוא משתמש בסימון במקום . לחוט אידיאלי ישנם אינסוף מודים טבעיים. לתדירות הכי נמוכה קוראים תדר/הרמונית בסיסית (fundamental harmonic), בעוד לתדרים היותר גבוהים קוראים אוברטונים (overtones) או הרמוניות גבוהות. (Meirovitch, 2001).
אנו יכולים לראות מכך שההבדל בין מערכות בדידות למערכות רציפות הוא יותר ב-צורת הפתרון, כי לכל עקרון שראינו במערכות בדידות, נוכל למצוא אנלוגיה במערכות רציפות. למשל, גם במערכות בדידות וגם במערכות רציפות היו לנו תדרים עצמיים . במערכות בדידות היו לנו מודים עצמיים , שהם וקטורים, כמספר דרגות החופש. גם כאן, במערכות רציפות, יש לנו מודים עצמיים, , שהם פונקציות.
גם מבחינת האורתוגונליות של המודים העצמיים יש דמיון מאוד חזק.
כאשר היא פונקציית המשקל של הבעית שטורם-ליוביל. במקרה של החוט שראינו לעיל, ראינו כי פונקציית המשקל היא . לכן
במקרה זה, האורתוגונליות היא (עבור שתי פונקציות עצמיות ):
כלומר, המודים העצמיים של המערכת אורתוגונליים לפי האינרציה, שזה בדיוק כמו במערכות בדידות. אם מציבים פתרון כללי לתוך המד”ח (ME8.55), מכפילים ב- כללי אחר, מבצעים אינטגרציה, ומציבים את (ME8.84), מקבלים ש:
שזה מראה שהמודים העצמיים (הנגזרת שלהם) אורתוגונליים לפי הקשיחות.
כלומר, גם במערכות רציפות, יש בי-אורתוגונליות למודים העצמיים לפי האינרציה ולפי הקשיחות.
אנו לרוב מעדיפים לעבור עם מודים עצמיים מנורמלים. כלומר, נדרוש שהמכפלה העצמית שלהם עם עצמם תקיים:
כלומר, נדרוש אורתונורמליות. שזה בדיוק מה שעשינו במערכות בדידות. נוכל לרשום זאת כמו שרשמנו שם:
עבור הקשיחות, ניתן להראות שזה יוצא:
מערכות עם מסות בשפה
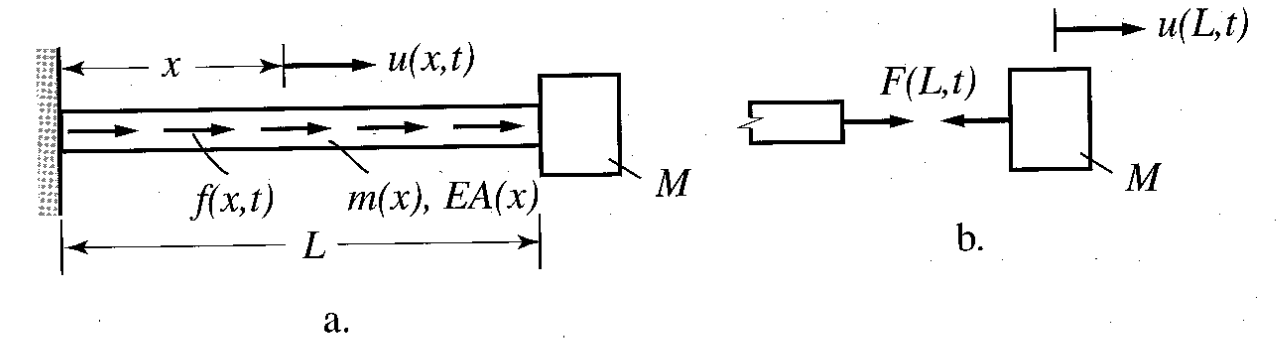
אם בשפה יש לנו עוד מסה בדידה, עלינו לחקור מחדש את המד”ח שהגדרנו. אנו נקבל למעשה שאחד מתנאי השפה יכלול את הערך העצמי באופן מפורש. כדי להדגים זאת, נביט במערכת הבאה:
כאשר הוא הקשיחות הצירית, הוא מודול יאנג, הוא שטח החתך (המשתנה) של המוט, הוא התזוזה הצירית, הוא הכוח הצירי ליחידת אורך ו- הוא המסה ליחידת אורך. בנוסף, המוט מקובע ב- , ולכן:
כדי לפתח את התנאי שפה הימני, נשים לב שהכוח הצירי קשור לדפורמציית המוט לפי:
בעצם במשוואה (ME8.114) אנו אומרים שהכוח בקצה הוא מכפלה של שטח החתך במאמץ (ה- הוא למעשה עיבור במקרה הפשוט - כאשר אנו מכפילים אותו ב- אנו מקבלים מאמץ), בהנחה והמאמץ מפולג באופן אחיד לאורך החתך. כעת, לפי חוק שני של ניוטון על מסה :
פתרון:
ראינו שמשוואת התנועה למוט פיתול תהיה מהצורה:
במקרה שלנו המוט עגול ואחיד בצפיפותו ובגאומטרייה שלו, כך ש- וגם . נוכל גם לרשום , כך ש:
כדי למצוא מודים ותדרים עצמיים, נבחן את המקרה ההומוגני, ללא כוחות חיצוניים:
נוכל לסדר כדי לקבל את משוואת הגלים:
כאשר . אנו פותרים את משוואה זו לפי שיטת הפרדת משתנים. נציע פתרון מהצורה ונקבל:
ונקבל את בעיית השטורם ליוביל:
כאשר .
לגבי התנאי שפה ב-, יש לנו קפיץ בקצה. אם נבצע דג”ח על קצה המוט, באותו אופן כמו במערכות עם מסות בשפה, נקבל מחוק שני:
נציב את הפתרון שהצענו ונקבל את תנאי השפה השני:
נסכם שהבעית שטורם ליוביל היא:
הפתרון של בעיה זו יהיה מהצורה:
את ו- נמצא מתנאי ההתחלה. נציב את פתרון זה בתנאי השפה ונקבל מערכת משוואות שנוכל לרשום בצורה מטריצית:
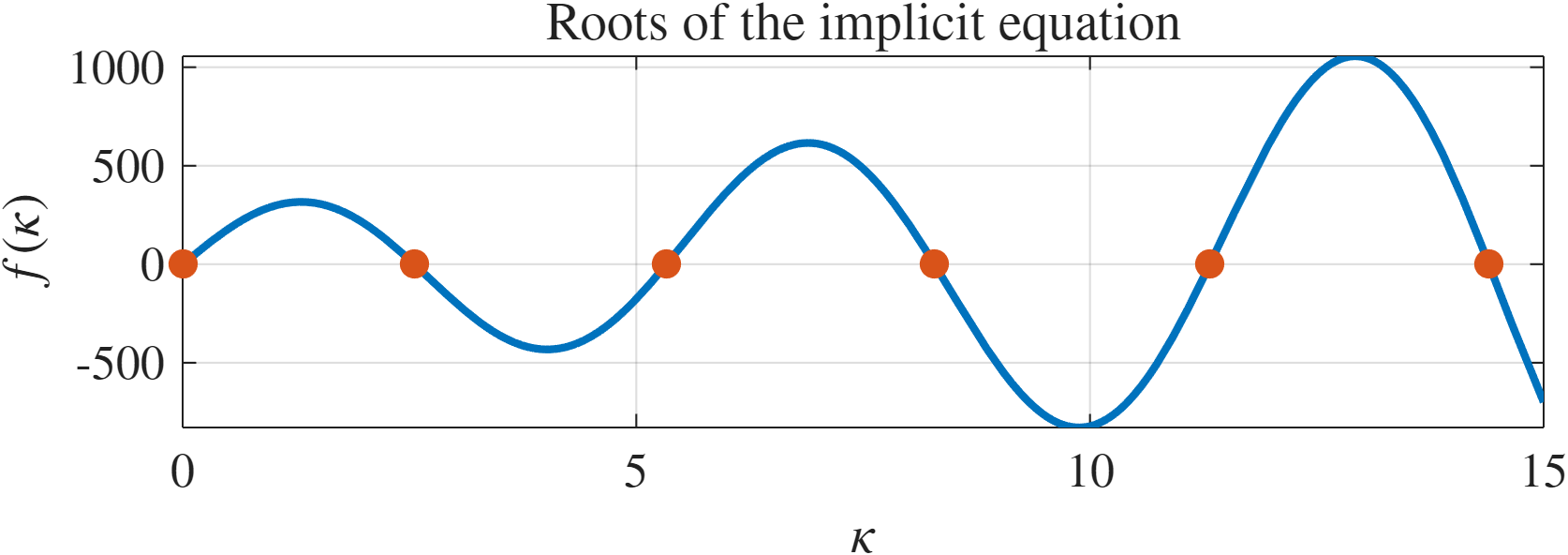
נדרוש פתרון לא טריוויאלי. כלומר, נדרוש שהדטרמיננטה של המטריצה לעיל תתאפס. נקבל את המשוואה:
זוהי משוואה סתומה. ניתן לפתור אותה נומרית. מבחינת הצגה גרפית, נקבל:
הצגה גרפית של הפונקציה הסתומה וחיתוכה עם ציר ה- - הפתרונות שלה.
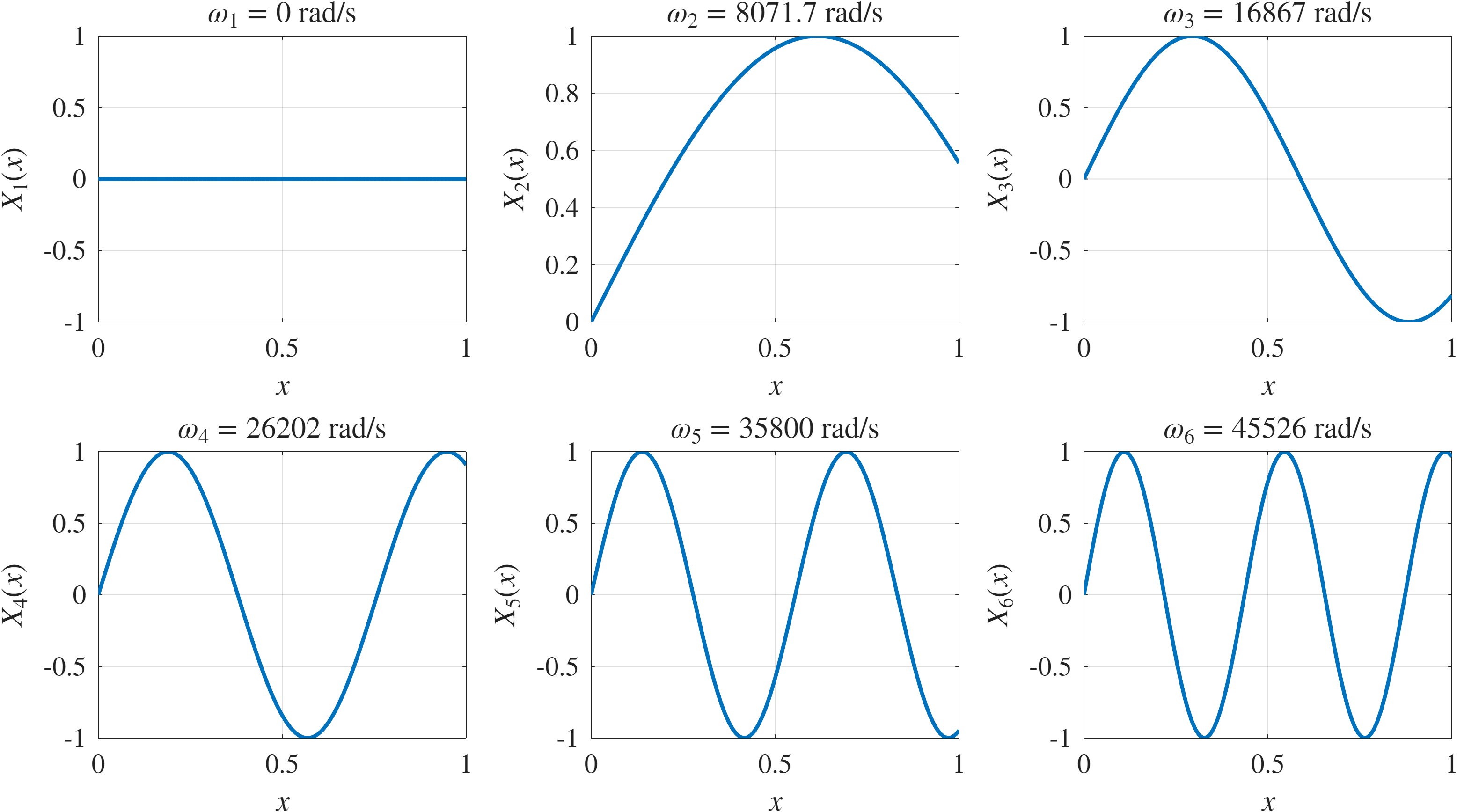
נוכל כעת למצוא את התדרים הטבעיים ע”י הצבה ב- . עבור ששת המודים הראשונים, התדרים הטבעיים:
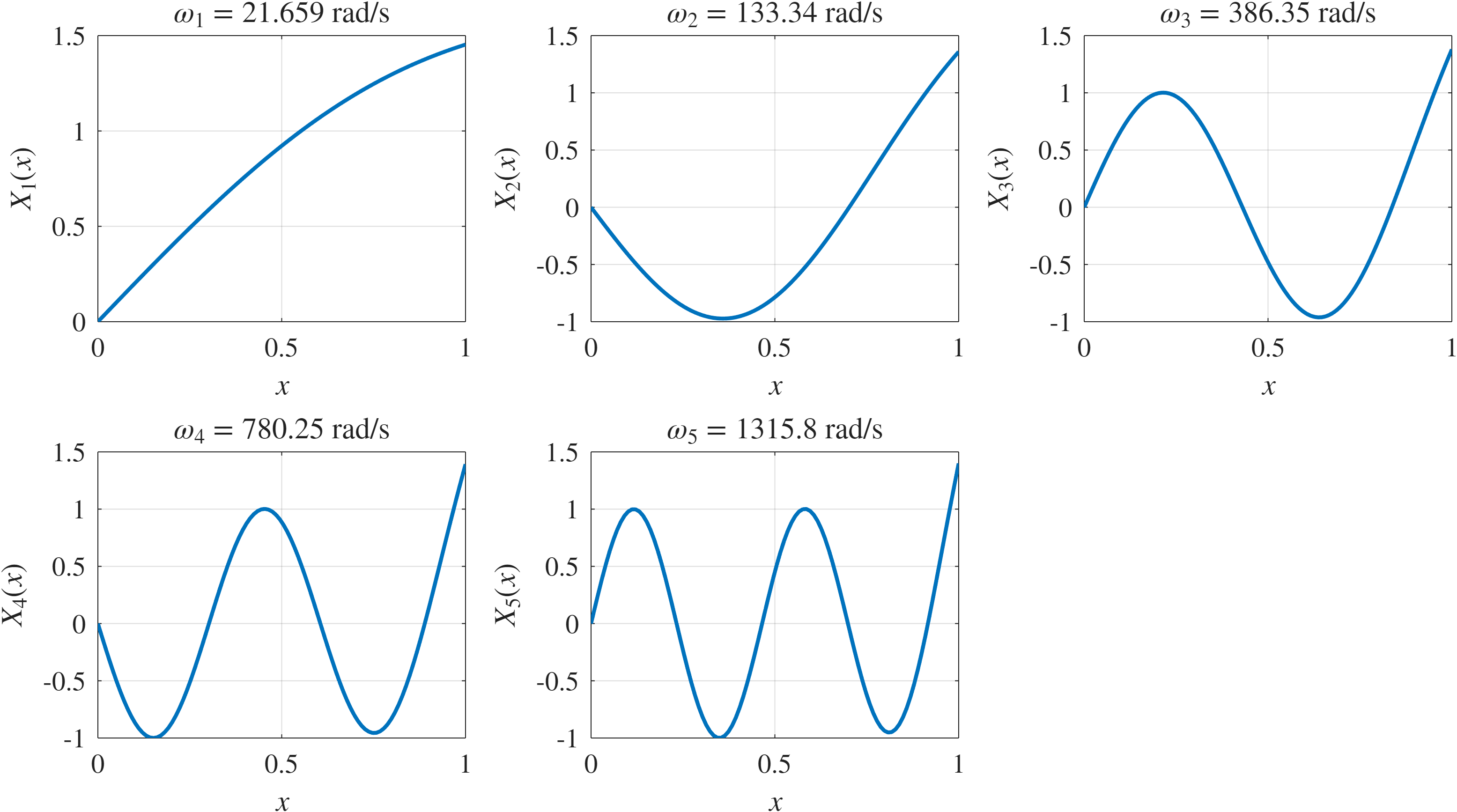
למעשה קיבלנו ש- הם מודים מתאימים לתדרים העצמיים המתאימים. כלומר הם המודים (הפונקציות העצמיות) וכל מוד יתקבל ע”י הצבת (עד כדי הכפלה בקבוע):
הפונקציות/המודים העצמיים של המערכת הנ”ל.
סעיף ב’
כעת נניח שפועל מומנט מפורס ומומנט מרוכז בקצה ב- . חשבו מודים מנורמלי מסה.
פתרון:
קיבלנו קודם שהמודים הם . בדומה למערכות מרובות דרגות חופש המודים נכונים עד לכדי קבוע. הסימון בא להעיד על כך שמדובר במוד לא מנורמל מסה. על מנת לנרמל במסה נשתמש בתכונות הבי-אורתוגונליות של המודים. עבור מערכת רציפה, היא מוגדרת כך:
כאשר היא הדלתא של קרונקר.
נדרוש שהקבועים במודים יהיו כאלה שהמסה המודלית של המודים מנורמלי המסה תהיה . כלומר:
לכן לכל מוד נקבל בהתאמה:
כאשר לא באמת מוגדר כי הוא פשוט המוד הטריוויאלי .
סעיף ג’
מצאו את משוואת התנועה בקואורדינטות מודליות בנוכחות מומנט מפורש כללי .
נציב את תנאי ההתחלה בחזרה במד”ר ונקבל ארבע משוואות, שנוכל לייצג אותן באופן מטריצי:
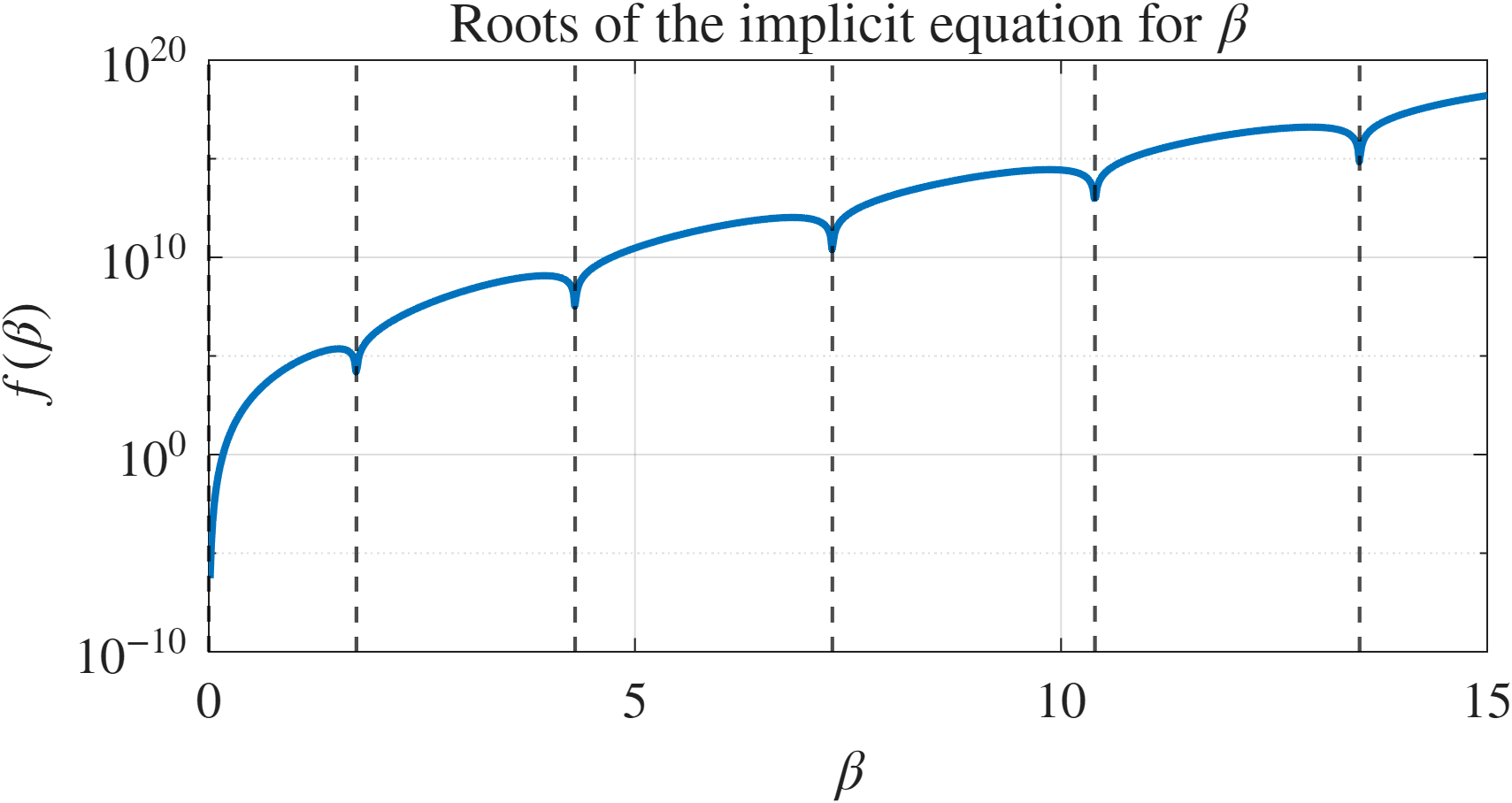
אנו לא מעוניינים בפתרונות טריוויאליים, לכן כדי למצוא תנאי על נאפס את הדטרמיננטה. נקבל פונקציה סתומה עבור , שהיא די ארוכה:
נשים לב ש- הוא אחד מהפתרונות, אבל ניתן לראות שפתרון כזה נותן את הפתרון הטריוויאלי (אם נציב בחזרה במד”ר). את שאר ה- נמצא נומרית. אם רוצים גרפית, נמצא כי:
גרף לוגריתמי של הפונקציה הסתומה. כל ירידה חדה של הפונקציה למטה היא למעשה שורש, כי, אמנם קשה לראות את זה, אבל זה אסימפטוטה אנכית. בגרף לוגריתמי, ירידה חדה כזאת מעידה על חיתוך עם ציר ה- (זה לא תמיד נכון, אבל מספיק בשבילנו כאן).
כדי למצוא את התדרים העצמיים, נזכור ש- .
כעת עלינו למצוא את המודים (אופני התנודה). נמצא את המקדמים ע”י הצבת הערך העצמי במטריצת תנאי השפה ופתירת מערכת המשוואות עבור . נזכור שקבוצת מקדמים כזאת נכונה עבור מסוים.
איך עושים ב- MATLAB?
נמצא את גרעין מטריצת תנאי השפה. ב-MATLAB עושים זאת ע”י הפקודה null(BCM(beta)) כאשר beta היא התדירות העצמית שאנו מעוניינים בה ו-BCM היא מטריצת התנאי שפה:
C=null(BCM(beta))
בנוסף, אין קבוצת יחידה עבור מסוים, אלא יש אינסוף כאלה - הם נכונים עד כפל בקבוע. לכן נוכל לרשום את המודים העצמיים (שלא מנורמלי מסה):
נציב את פתרון זה בחזרה במד”ח, נכפול ב-, ונבצע אינטגרציה כך שנקבל:
בעזרת הבי-אורתוגונליות נקבל פשוט (לאחר הוספת ריסון מודלי כי ביקשו):
כל אחד מהמודים שמתקבל, לאחר פתרון המד”ר (לא נראה כאן פיתוח):
כאשר .
נתונים תנאי ההתחלה, שכל אחד מהם נצטרך לפתח לטור לפי פונקציות עצמיות:
לכן, עלינו למצוא מהם ו-. מתוך תכונת בי-אורתוגונליות נקבל:
סעיף ד’
מצאו את הפתרון בעזרת חמשת המודים הראשונים, עם ריסון מודלי של עבור תנאי ההתחלה הבאים:
1. u(x,0)=10^{-2}\sin(\pi x),\qquad \dot{u}(x,0)=0
פתרון:
אנו נדרשים לחשב את התגובה לשני תנאי ההתחלה באמצעות חמישה מודים, כאשר הריסון המודלי הוא . נשים לב שמאחר ובשני המקרים , במובנים של סעיף קודם, לפי (2.3), זה אומר , ולכן . את נחשב לפי (2.3):
אם נציב בחזרה במשוואה (2.2), שאותו נציב ב-(2.1), נקבל ביטוי לתגובה, .
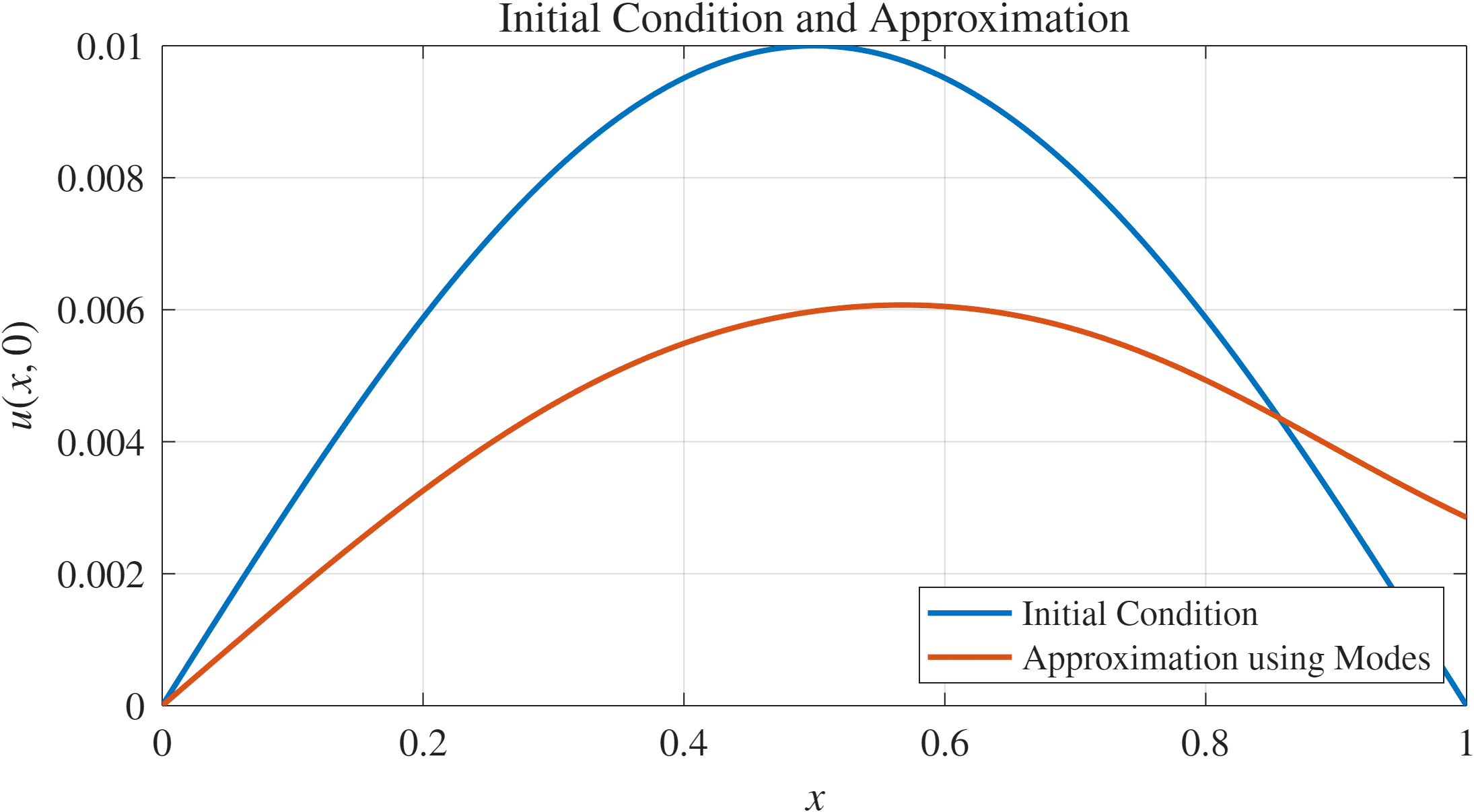
עבור תנאי ההתחלה הראשון:
שיעור התנאי התחלה לפי חמשת המודים הראשונים .
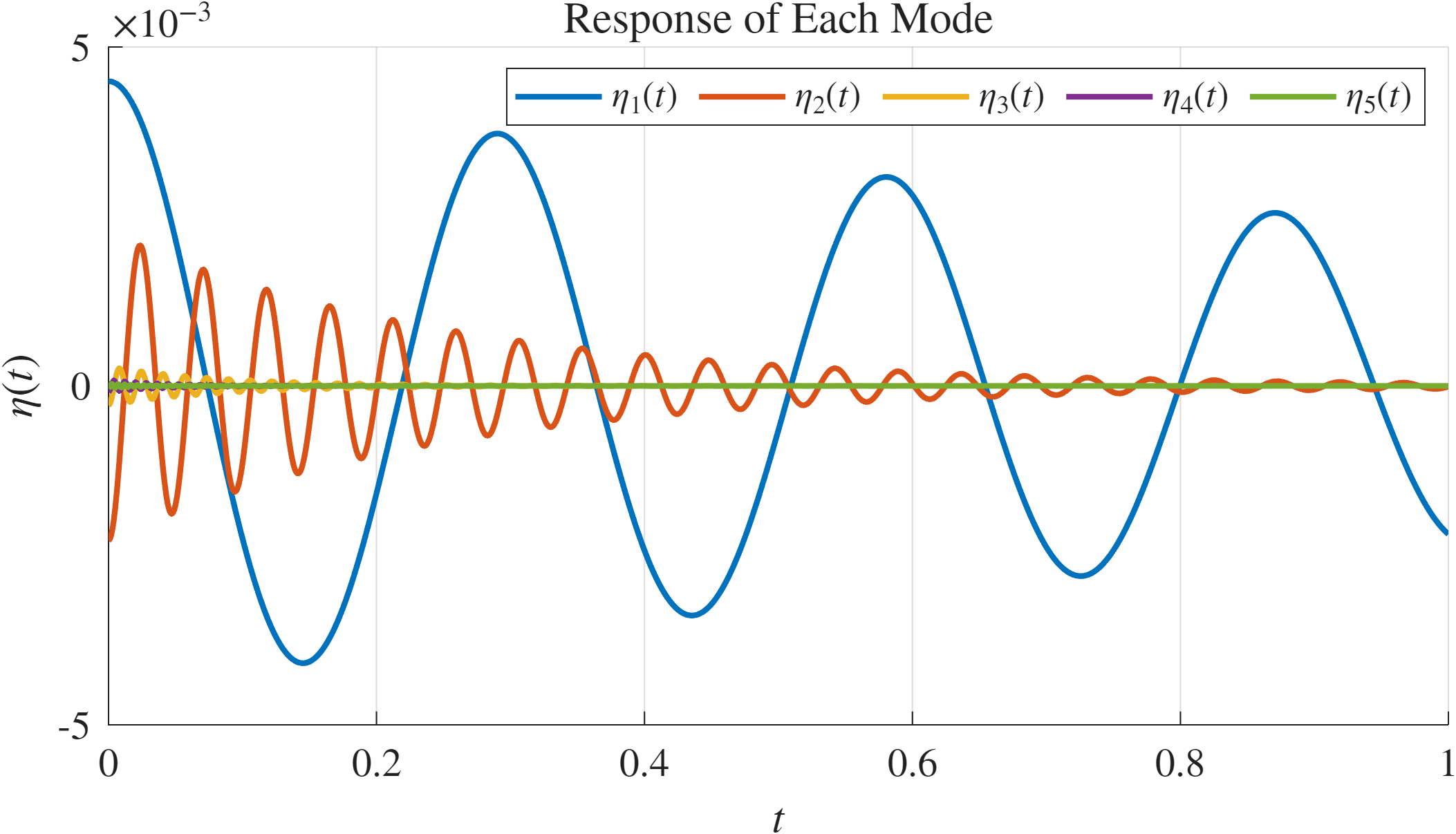
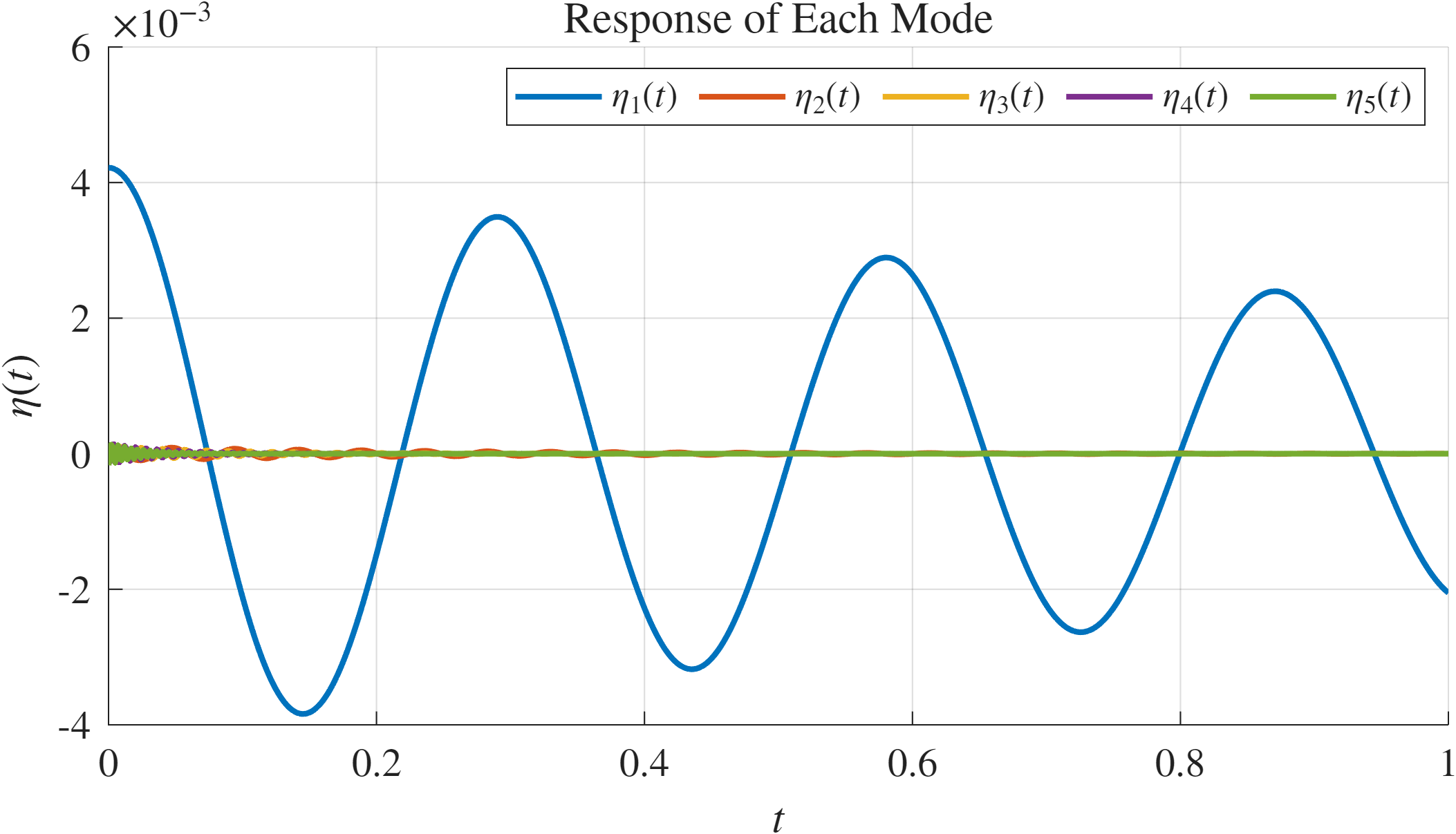
תגובת כל מוד לתנאי ההתחלה .
נשים לב כי:
מהתגובה המודלית ניתן לראות שהיטלי תנאי ההתחלה על המוד הראשון הוא הגדול ביותר.
כמו כן ניתן לראות שהמודים הגבוהים דועכים מהר יותר ולאחר חצי שניה בערך התגובה מורכבת כמעט אך ורק מהמוד הראשון.
ניתן לראות שיש הבדל בין תנאי ההתחלה המקורי לבין זה המתואר באמצעות הסכום המודלי המקוצץ, שעושה שימוש בחמישה מודים בלבד. השגיאה בין צורת הכפיפה לתנאי ההתחלה אינה זניחה, אולם מתקבלת על הדעת. ע”מ להקטין את השגיאה יש להתחשב במודים נוספים בסכום המודלי.
עבור תנאי ההתחלה השני:
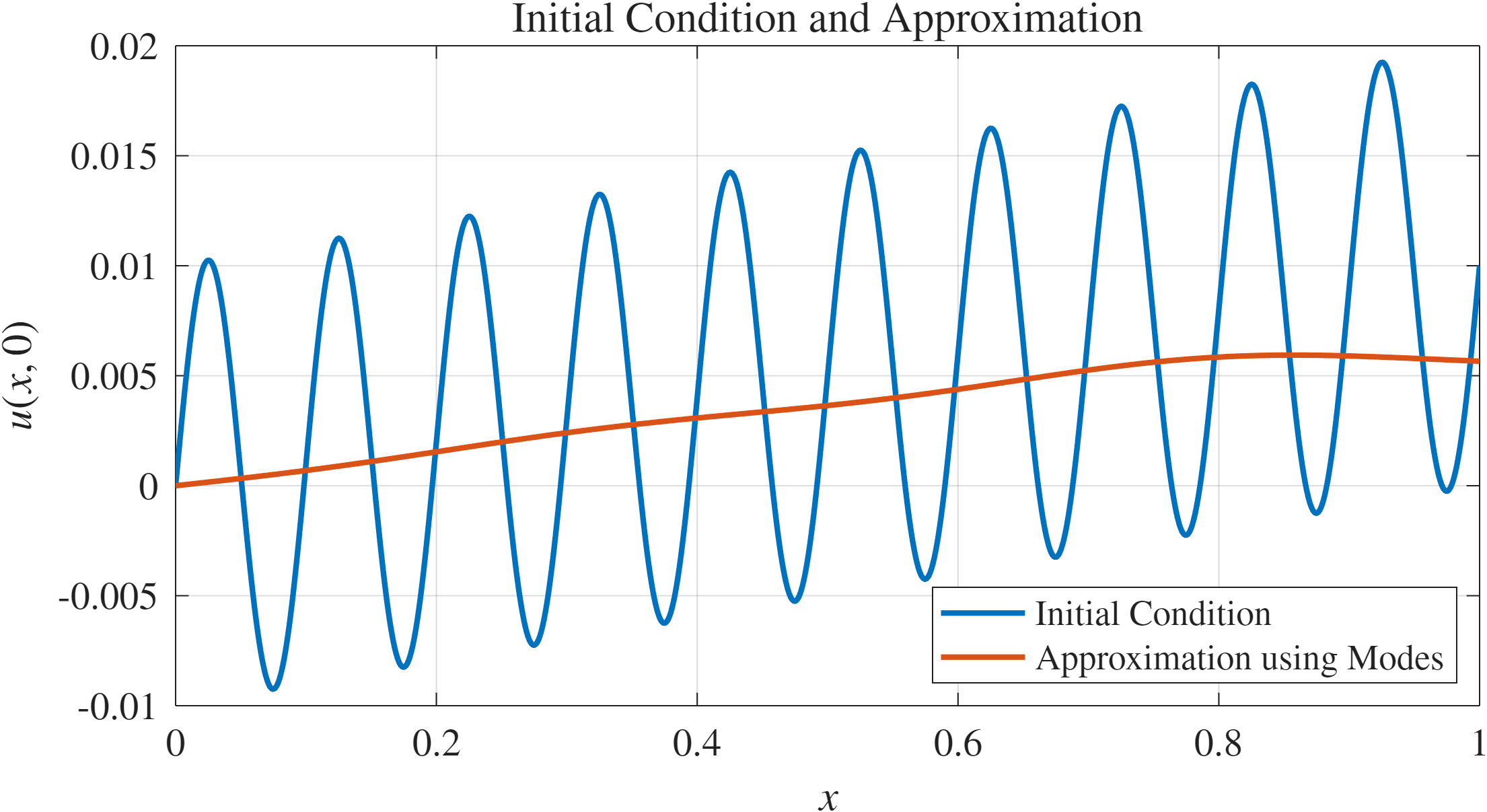
שיעור התנאי התחלה לפי חמשת המודים הראשונים .
תגובת כל מוד לתנאי ההתחלה .
נשים לב שניתן לראות שיש הבדל משמעותי בין תנאי ההתחלה המקורי לבין זה המתואר באמצעות הסכום המודלי המקוצץ, שעושה שימוש בחמישה מודים בלבד. השגיאה במקרה זה אינה זניחה וע”מ להקטינה יש להתחשב במודים נוספים. חישוב התגובה לתנאי ההתחלה באמצעות המודל המקוצץ במקרה זה הינו שגוי ויניב תוצאות גרועות.