from (Lynch & Park, 2017):
In a previous chapter we saw how to calculate the robot end-effector frame’s position and orientation for a given set of joint positions using forward kinematics. In this chapter we examine the related problem of calculating the twist of the end-effector of an open chain from a given set of joint positions and velocities.
Before we reach the representation of the end-effector twist as
where
where
To provide a concrete example, consider a
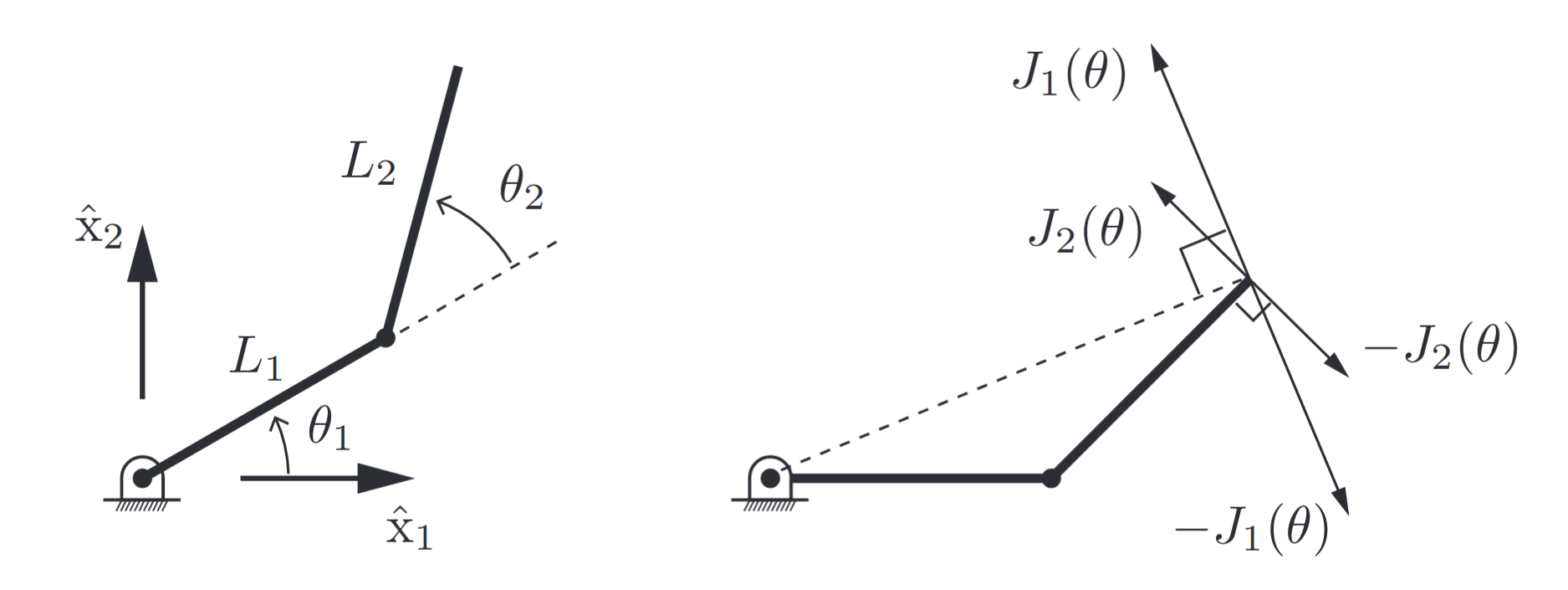
(Left) A
robot arm. (Right) Columns 1 and 2 of the Jacobian correspond to the endpoint velocity when (and ) and when (and ), respectively. (Lynch & Park, 2017).
Differentiating both sides with respect to time yields
which can be rearranged into an equation of the form
Writing the two columns of
As long as
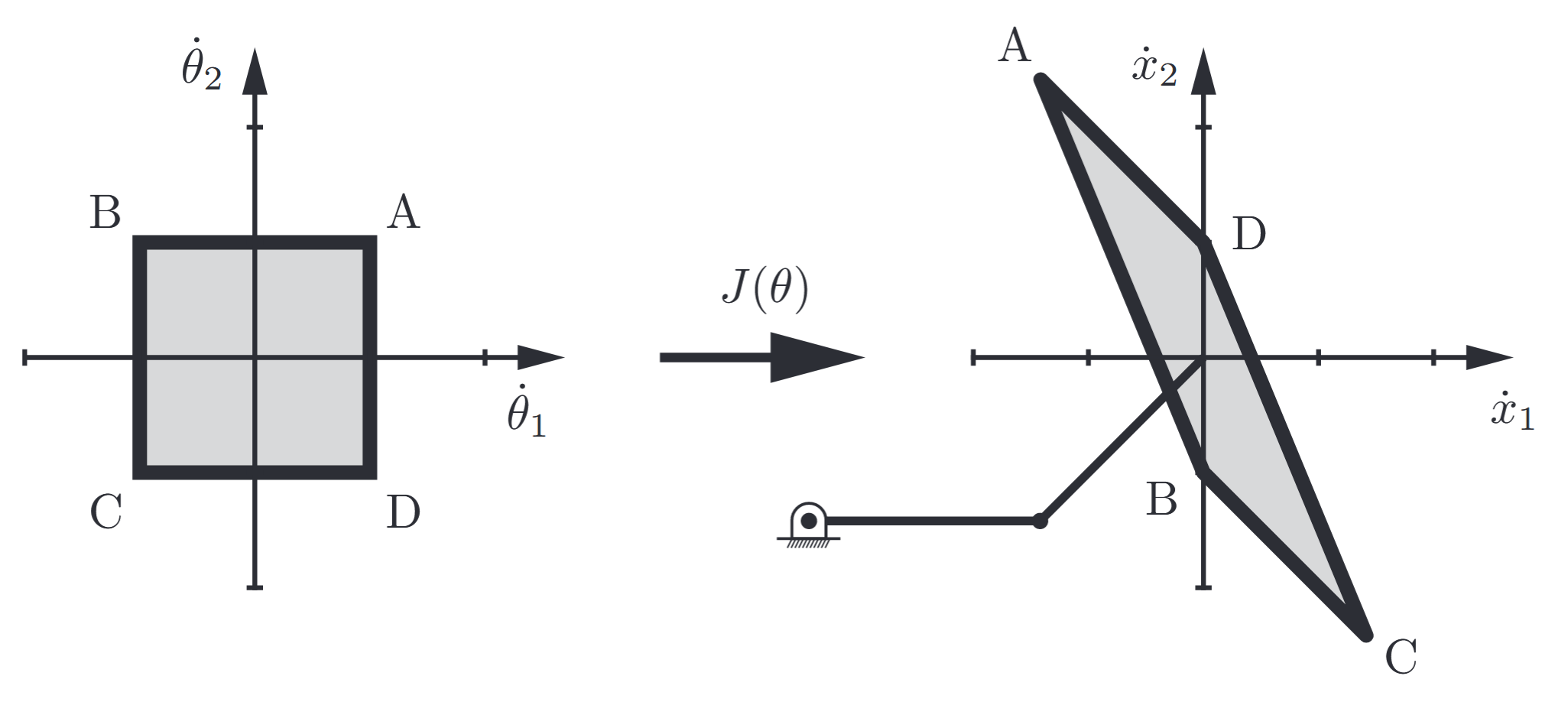
Figure 4.1: Mapping the set of possible joint velocities, represented as a square in the
– space, through the Jacobian to find the parallelogram of possible end-effector velocities. The extreme points , , , and in the joint velocity space map to the extreme points , , , and in the end-effector velocity space. (Lynch & Park, 2017).
Now let’s substitute
The Jacobian can be used to map bounds on the rotational speed of the joints to bounds on
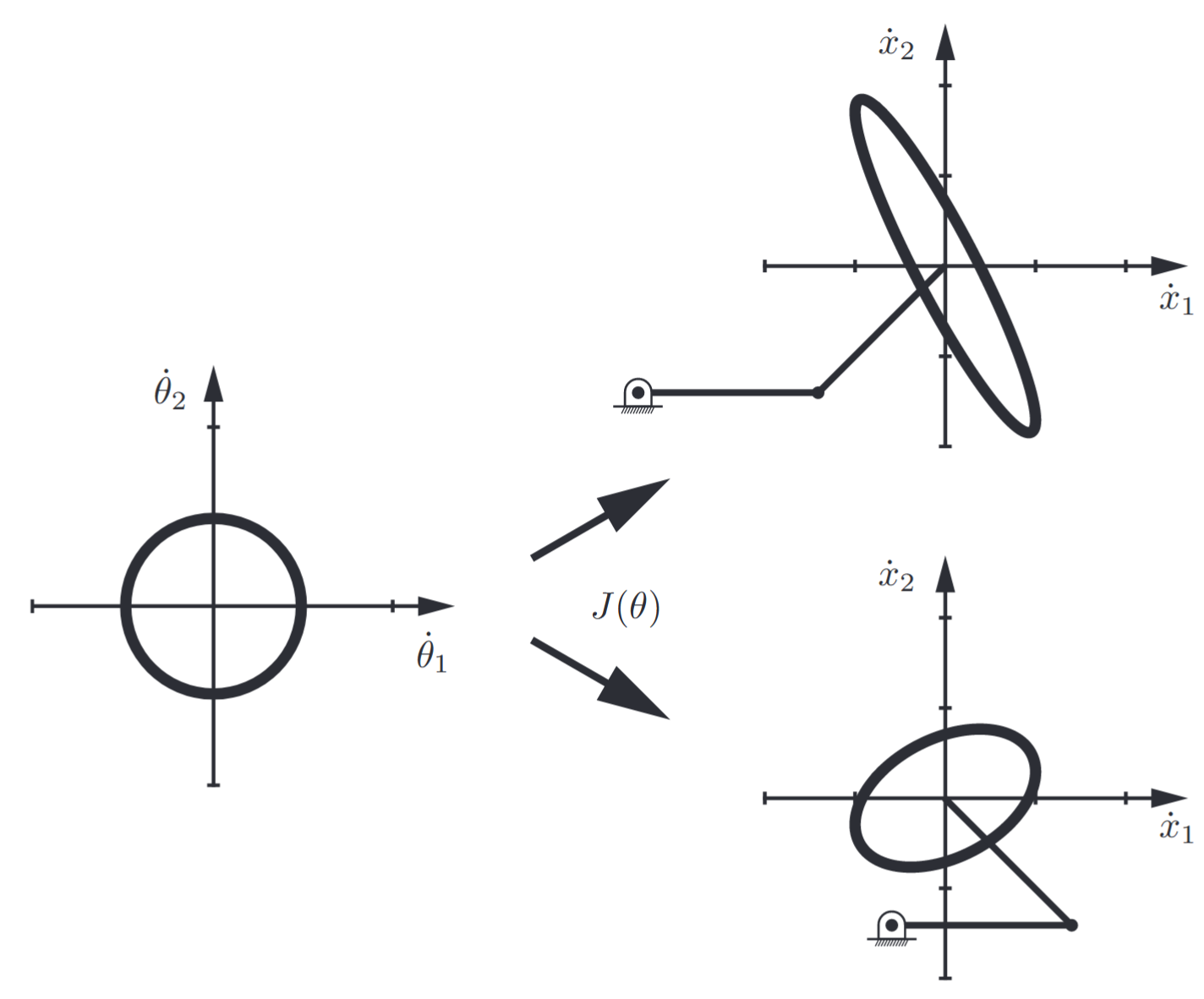
Figure 4.2: Manipulability ellipsoids for two different postures of the
planar open chain. (Lynch & Park, 2017).
Using the manipulability ellipsoid one can quantify how close a given posture is to a singularity. For example, we can compare the lengths of the major and minor principal semi-axes of the manipulability ellipsoid, respectively denoted
The Jacobian also plays a central role in static analysis. Suppose that an external force is applied to the robot tip. What are the joint torques required to resist this external force? This question can be answered via a conservation of power argument. Assuming that negligible power is used to move the robot, the power measured at the robot’s tip must equal the power generated at the joints. Denoting the tip force vector generated by the robot as
for all arbitrary joint velocities
must hold for all possible
The joint torque
Using the equation above one can now determine, under the same static equilibrium assumption, what input torques are needed to generate a desired tip force, e.g., the joint torques needed for the robot tip to push against a wall with a specified normal force. For a given posture
then Equation (LP5.4) can be used to generate the set of all possible tip forces as indicated in the following figure:
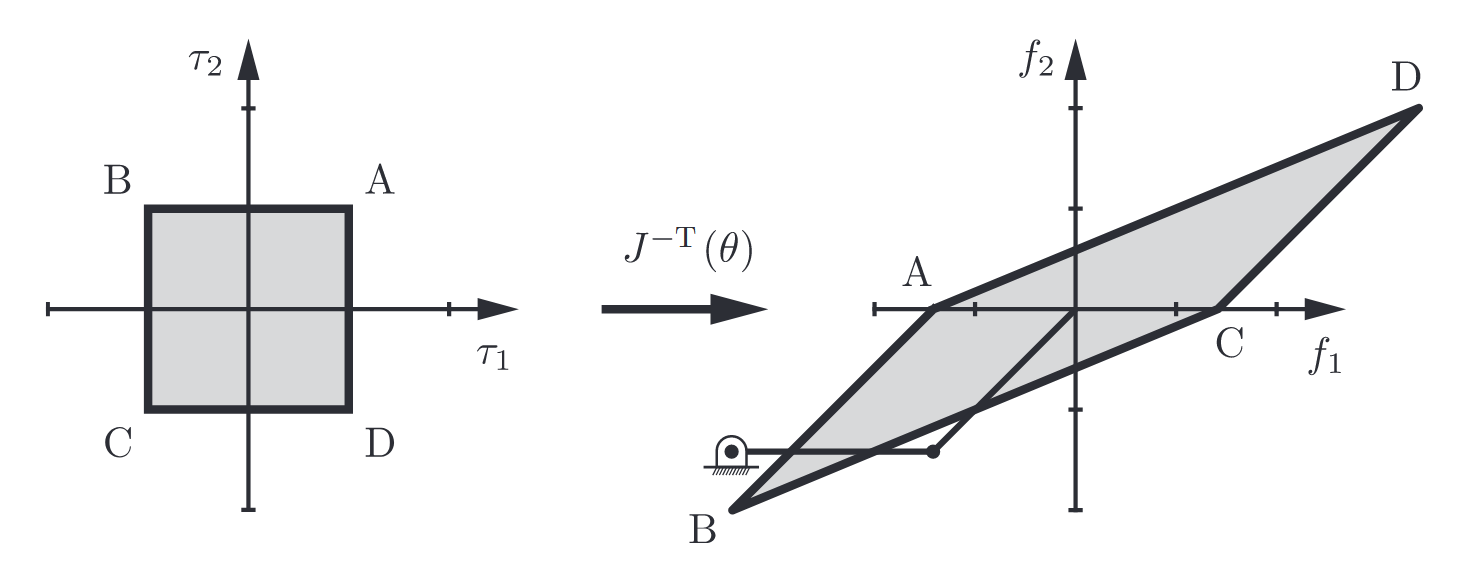
Figure 4.3: Mapping joint torque bounds to tip force bounds. (Lynch & Park, 2017).
As for the manipulability ellipsoid, a force ellipsoid can be drawn by mapping a unit circle “iso-effort” contour in the
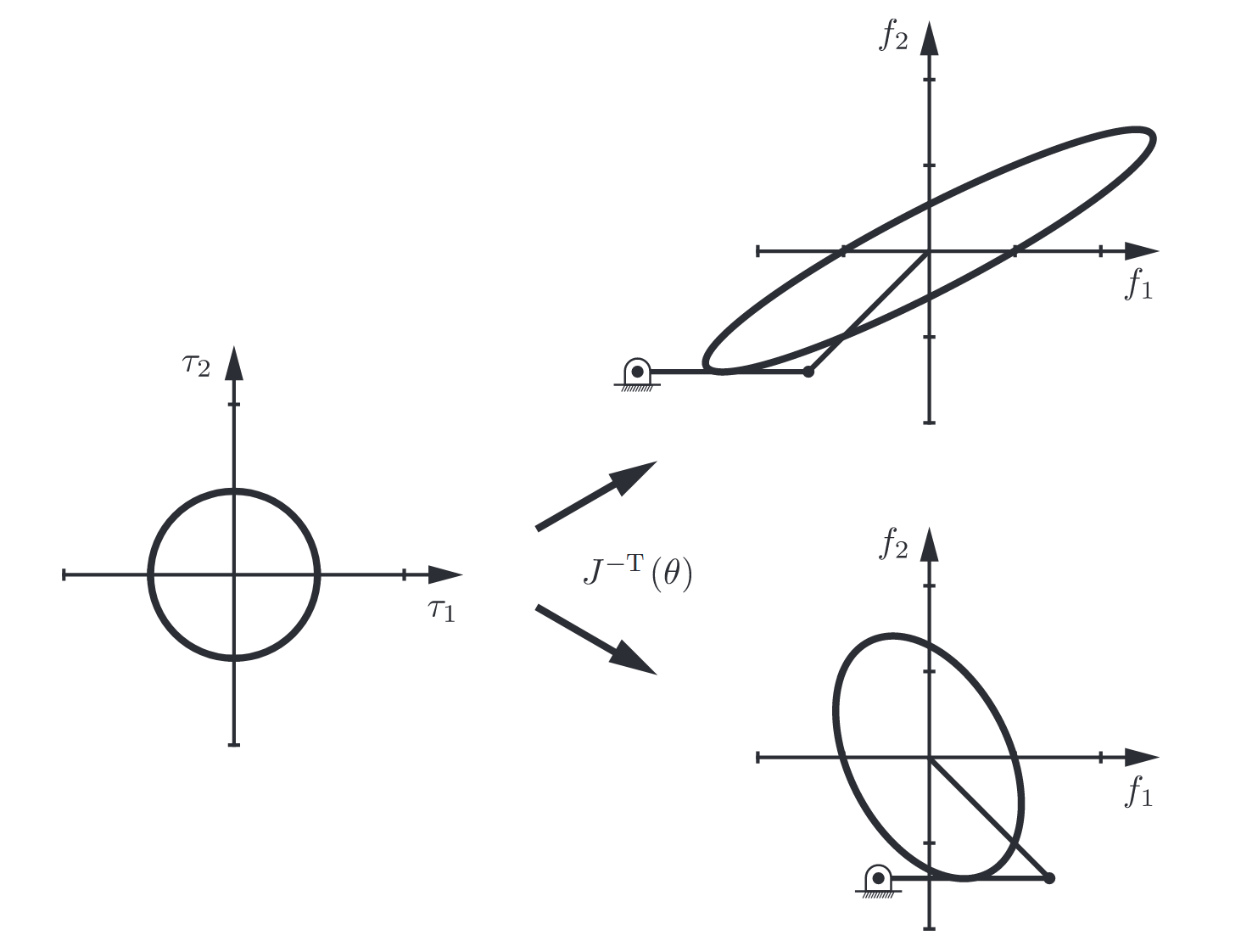
Figure 4.4: Force ellipsoids for two different postures of the
planar open chain. (Lynch & Park, 2017).
As is evident from the manipulability and force ellipsoids, if it is easy to generate a tip velocity in a given direction then it is difficult to generate a force in that same direction, and vice versa (See the following figure). In fact, for a given robot configuration, the principal axes of the manipulability ellipsoid and force ellipsoid are aligned, and the lengths of the principal semi-axes of the force ellipsoid are the reciprocals of the lengths of the principal semi-axes of the manipulability ellipsoid.
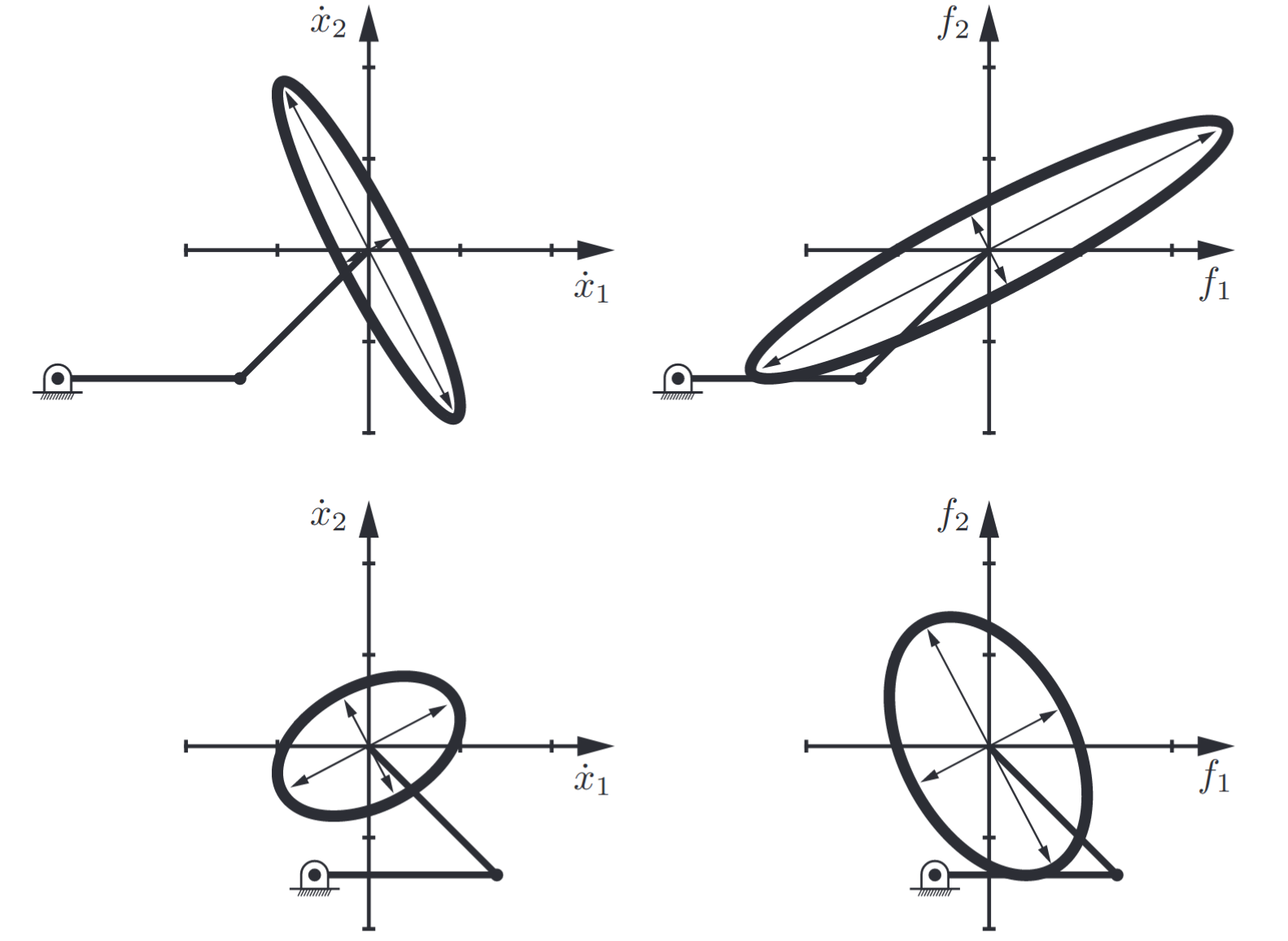
Figure 4.5: Left-hand column: Manipulability ellipsoids at two different arm configurations. Right-hand column: The force ellipsoids for the same two arm configurations. (Lynch & Park, 2017).
At a singularity, the manipulability ellipsoid collapses to a line segment. The force ellipsoid, on the other hand, becomes infinitely long in a direction orthogonal to the manipulability ellipsoid line segment (i.e., the direction of the aligned links) and skinny in the orthogonal direction. Consider, for example, carrying a heavy suitcase with your arm. It is much easier if your arm hangs straight down under gravity (with your elbow fully straightened at a singularity), because the force you must support passes directly through your joints, therefore requiring no torques about the joints. Only the joint structure bears the load, not the muscles generating torques. The manipulability ellipsoid loses dimension at a singularity and therefore its area drops to zero, but the force ellipsoid’s area goes to infinity (assuming that the joints can support the load!).
In this chapter we present methods for deriving the Jacobian for general open chains, where the configuration of the end-effector is expressed as
Manipulator Jacobian
In the
We begin with the general case where
For manipulators described using Denavit-Hartenberg parameters, the Jacobian can be systematically derived. Each column of the Jacobian corresponds to the end-effector velocity when one joint moves with unit velocity while all other joints remain stationary.
Jacobian Matrix for D-H Parameters
For an
The Jacobian matrix
where
Linear Jacobian Computation - Shortcut
For many applications, especially when dealing with planar manipulators or when only the linear velocity of the end-effector is of interest, there is a more direct approach to compute the linear part of the Jacobian. This shortcut method is based on differentiating the end-effector position vector directly.
From the forward kinematics, the position of the end-effector frame origin is:
We differentiate with respect to time using the chain rule:
Therefore, the
This shortcut is particularly useful for planar manipulators where only the linear motion is relevant, avoiding the need to compute the full
Systematic Algorithm for Computing the Jacobian
The systematic approach to compute the Jacobian using D-H parameters follows these steps:
Step 1: Compute All Transformation Matrices
For
Step 2: Extract Frame Information
From each transformation matrix
where:
Step 3: Initialize Base Frame
For the base frame (frame
Step 4: Compute Jacobian Columns
For each joint
Revolute Joint
The
Prismatic Joint
The
Step 5: Assemble the Complete Jacobian
Physical Interpretation
Each column
- Joint
- All other joints are stationary (
For revolute joints:
For prismatic joints:
For a revolute joint, the cross product
where
Manipulator Statics
As established earlier in this chapter, the Jacobian matrix plays a central role in static analysis through the fundamental relationship (see Equation (LP5.3)):
In this section, we extend this analysis to more complex scenarios involving multiple loads, gravity effects, and practical applications.
Multi-Body Static Analysis
Superposition Principle
In practice, manipulators must support not only external loads but also their own weight. Using the principle of superposition, we can treat each force source separately and sum their contributions:
Gravity Effects on Links
For each link
where
Important Considerations:
- The Jacobian
for link considers only the motion of the first joints - The position vector extends to the center of mass of link
, not the end-effector - Link masses typically act at the geometric center or center of mass of each link
Force Application Point Considerations
If an external force is not applied at the origin of the end-effector frame, but at a point displaced by vector
Special Static Configurations
Zero-Torque Configurations
At certain configurations, it may be possible to support external loads without any joint torques. This occurs when the external wrench lies in the null space of
Such configurations typically correspond to singular poses where the external force/torque is aligned with the lost degrees of freedom.
Inverse Force Analysis
Using the inverse relationship from Equation (LP5.4), we can determine external forces from known joint torques:
This is valid only when
Exercises
Question 1
The D-H parameters of a manipulator are:
Part a
Compute the Jacobian matrix.
Solution:
We follow the systematic algorithm from the previous section.
Step 1: Compute Transformation Matrices
Using the D-H parameters, we first compute the individual transformations and then the cumulative ones:
Step 2: Extract Frame Information
From the transformation matrices, we extract:
For frame
For frame
For frame
Step 3: Compute Jacobian Columns
For joint
Using the formula
Therefore the linear velocity:
For joint
Using the formula
Therefore the linear velocity:
Step 4: Assemble the Jacobian
Since the manipulator is planar (motion restricted to the
The full
but for analysis we focus on the linear part since all angular velocities are around the
Alternative Solution using the Shortcut Method:
Since this is a planar manipulator, we can use the linear Jacobian shortcut method. From the forward kinematics, the end-effector position is:
We can compute the linear Jacobian by direct differentiation:
This gives the same result:
Part b
Compute the singular states of the manipulator, and determine the direction toward which the gripper cannot move in these states.
Solution:
Since the linear Jacobian is square, we compute:
The manipulator has singular states when:
For the loss of manipulability direction, consider
To find the loss of manipulability direction, we compute the left null space of
This gives us:
The loss of manipulability direction is along the radial direction from the base to the end-effector when the arm is fully extended or folded.
Question 2
The D-H parameters of a manipulator are:
Part a
Compute the Jacobian matrix.
Solution:
We follow the systematic algorithm step by step.
Step 1: Compute Transformation Matrices
First, let’s compute each individual D-H transformation:
For joint
For joint
Now computing
For joint 3:
We will get:
Step 2: Extract Frame Information
From the transformation matrices:
Frame
Frame
Frame
Frame
Step 3: Compute Jacobian Columns
For joint 1 (revolute):
Therefore the linear velocity:
And the angular velocity:
For joint 2 (revolute):
Therefore the linear velocity:
And the angular velocity:
For joint 3 (prismatic):
Since this is a prismatic joint, we use the formula
Step 4: Assemble the Complete Jacobian
Part b
Compute the singular states of the manipulator, and determine the loss of manipulability directions.
Solution:
Since the linear Jacobian is square, we compute:
The manipulator has singular states when:
-
Case 1:
The loss of manipulability direction is -
Case 2:
The loss of manipulability direction is -
Case 3:
This represents a specific geometric configuration where the workspace boundary is reached.
Question 3
A manipulator with 3 joints (RRP configuration) has:
- Link masses
- A camera with weight
- Joint variables:

Figure 4.6: RRP manipulator holding a camera.
Part a
Derive the joint torques
Solution:
For this RRP manipulator, we are given the
The transpose is:
We use the principle of superposition to treat each mass separately and sum their contributions.
For the Camera Load:
The camera experiences gravitational force
Using the fundamental statics equation:
For Link Mass
Link 3 extends from joint
We modify the Jacobian by changing the third joint variable from
Therefore:
For Link Mass
Link
Therefore:
We maintain the dimension by inserting
For Link Mass
Mass
Therefore:
Superposition - Total External Torques:
Joint Forces and Torques Required:
To maintain static equilibrium, the manipulator motors must produce opposite torques and forces:
Part b
Determine the specific configuration where no motor torques are required.
Solution:
For zero joint torques, we need:
This occurs when the total gravitational force is in the null space of
For the RRP manipulator, singularities typically occur when:
At this configuration:
- The manipulator is in a singular pose
- The gravitational forces are balanced by the manipulator’s structure
- No actuator torques are required
Important Note:
This configuration represents a kinematic singularity where the manipulator loses degrees of freedom, making precise control difficult.
Question 4
For a

The given manipulator.
The transformation matrices are given as:
Given that the manipulator experiences:
- External force
- Known joint torques
Compute the applied external force components
Solution:
This is an RP (revolute-prismatic) manipulator. From the given transformation matrices, we can derive the forward kinematics and then compute the Jacobian.
From
The linear Jacobian can be computed using the shortcut method by differentiating the position:
Therefore, the linear Jacobian is:
For a 2D planar case, we use only the first two rows:
Using the fundamental statics equation:
where
The motor torques
The transpose of the linear Jacobian is:
To find the external forces from the given motor torques, we compute:
The determinant of
The inverse is:
Therefore:
So we get:
Question 5
A
Part a
Find the configuration where no joint torques are required to support the weight.
Solution:
For zero joint torques to support the weight
where
Using the given Jacobian transpose:
Computing
For zero joint torques, we need:
From
Since
From
Since
Therefore, the configuration where no joint torques are required is:
Part b
Explain the physical interpretation of this result.
Solution:
The physical interpretation of this zero-torque configuration has several important aspects:
Geometric Configuration:
- When
- When
Force Transmission:
- In this configuration, the gravitational force
- The manipulator’s kinematic structure allows this force to be transmitted directly through the mechanical linkages
- No active joint torques are required because the force is supported by the structural elements rather than the actuators
Singularity Condition:
- This configuration corresponds to a kinematic singularity of the manipulator
- At singularities, certain directions of motion become impossible, but forces in specific directions can be supported without actuator effort
- The manipulator loses one or more degrees of freedom in this pose
Physical Analogy:
- This is similar to holding a heavy object with your arm fully extended vertically - the weight is supported by bone structure rather than muscle effort
- The gravitational force passes through the joint axes, creating no moments about those joints
Practical Implications:
- While this configuration requires no actuator torques, it represents a loss of manipulability
- The manipulator cannot generate motion in certain directions from this pose
- This configuration might be useful for energy-efficient load holding but problematic for precise manipulation tasks
Engineering Consideration:
Although no actuator torques are required, the mechanical structure must still support the compressive or tensile loads. This configuration is useful for energy conservation but limits the manipulator’s motion capabilities.